TL;DR(まとめ)
- M5StickC, Raspberry Pi Zero W, Google Home Mini を用いて歯磨き応援ツールを開発しました。
- M5StickCは加速度センサー、内蔵バッテリー、Wi-Fi、モニタ、スピーカーHAT(後付け)ありでPoCに最適なデバイスでした。
- PoCによって作り手がこだわった機能と、ユーザーに刺さる機能は必ずしも一致しないことを学びました。
きっかけ
- M5StickC × 加速度センサーで何か面白いものを作る、というお題が出た。
- 最近子供が歯磨きを面倒くさがっている。
システム構成

- 歯ブラシを 1 往復したら( M5StickC の加速度センサーで Y 軸方向に一定以上の差分が出たら) 1 回カウントする。
- カウントごとに SPK HAT から音を鳴らす。(プッ!プッ!)
- 10 回ごとに少し高めの音を鳴らす。(ピッ!)
- 一定回数ごとに LCD モニターに "Over XX times!" と表示させる。
- 規定回数を超えたら Google Home に激励(あるいはお疲れ様)のメッセージを喋ってもらう。
構築手順(ブラッシュアップのアドバイス大募集中です!)
M5StickC スケッチ
(2019/12/12追記)HTTP / POST した後に http.end(); する1行を追加
cheer_brushing.ino
# include <M5StickC.h>
# include <WiFiClientSecure.h>
# include <ArduinoJson.h>
# include "config.h"
# include <HTTPClient.h>
// Speaker用
const int servo_pin = 26;
int freq = 50;
int ledChannel = 0;
int resolution = 10;
// getAccelData用
float accX = 0;
float accY = 0;
float accZ = 0;
float previous_accY = 0;
float current_accY = 0;
// ブラッシングカウント用
int brushing_count = 0;
// カウントフラグ
int count_flag = 0;
// Google Homeが喋るセリフ
char *nodered_json = "";
// HTTP Response
int status_code = 0;
WiFiClientSecure wifiClient;
HTTPClient http;
void setup_wifi() {
if (WiFi.status() != WL_CONNECTED) {
Serial.print("connecting to ");
Serial.print(ssid);
Serial.println("...");
WiFi.begin(ssid, password);
if (WiFi.waitForConnectResult() != WL_CONNECTED) {
// Wi-Fiアクスポイントへの接続に失敗したら5秒間待ってリトライ
Serial.println("failed to connect");
delay(5000);
return;
} else {
Serial.print("WiFi connected: ");
Serial.println(WiFi.localIP());
//M5.Lcd.setTextSize(1);
//M5.Lcd.println(WiFi.localIP());
}
//wifiClient.setCACert(test_ca_cert);
randomSeed(micros());
}
}
// 初期設定
void setup() {
M5.begin();
M5.Axp.ScreenBreath(8); // 画面の輝度(MIN:7~MAX:15)
M5.Lcd.setRotation(3); // 左を上にする
M5.Lcd.setTextSize(2); // 文字サイズを2にする
M5.Lcd.fillScreen(BLACK); // 背景を黒にする
//シリアル接続速度指定
Serial.begin(9600);
//Wi-Fi接続
setup_wifi();
// 6軸センサー
M5.MPU6886.Init();
// Speaker用
ledcSetup(ledChannel, freq, resolution);
ledcAttachPin(servo_pin, ledChannel);
}
// Node-REDにWebhooks
void nodered_post(int counts) {
Serial.println(counts);
//const char *nodered_json = "{\"message\":\"" + msg + "\"}";
if ( counts == 50) {
nodered_json = "{\"message\":\"まだまだがんばれ\"}";
} else if ( counts == 100) {
nodered_json = "{\"message\":\"もう少しだよ\"}";
} else if ( counts == 150) {
nodered_json = "{\"message\":\"はい、お疲れ様でした\"}";
}
Serial.println(nodered_json);
http.begin( nodered_server, 1880, "/hamigakimsg");
http.addHeader("Content-Type", "application/json" );
status_code = http.POST((uint8_t*)nodered_json, strlen(nodered_json));
Serial.println(status_code);
http.end();
}
// ループ処理
void loop() {
// 加速度取得(変化前)
M5.MPU6886.getAccelData(&accX,&accY,&accZ);
previous_accY = accY * 1000;
// 加速度表示
M5.Lcd.setCursor(0, 0);
M5.Lcd.println(previous_accY);
// 100ミリ秒待つ
delay(100);
// 加速度取得(変化後)
M5.MPU6886.getAccelData(&accX,&accY,&accZ);
current_accY = accY * 1000;
// Y軸加速度の差分が400以上の場合
if ( current_accY - previous_accY > 400) {
// Beep音発行(10階ごとにちょい高めの音鳴らす)
if ( brushing_count % 10 == 0) {
ledcWriteTone(ledChannel, 1500);
} else {
ledcWriteTone(ledChannel, 1000);
}
delay(10);
ledcWriteTone(ledChannel, 0);
// ブラッシング回数インクリメント
brushing_count++;
}
// ブラッシング回数表示
M5.Lcd.setCursor(0, 16);
M5.Lcd.println(brushing_count);
// ToDo 一定回数超えたらWebhooksしてGoogle Homeしゃべらす。
if ( brushing_count % 50 == 0 && brushing_count !=0 && count_flag == 0) {
// 一定回数超えたことを表示する。
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setCursor(0, 32);
M5.Lcd.println("over " + String(brushing_count) + " times!!");
// Google Home しゃべらす。
nodered_post(brushing_count);
// ループ抑止フラグを立てる
count_flag = 1;
}
// 51,101,151回目の時にフラグを初期化する。
if ( brushing_count % 50 == 1) {
count_flag = 0;
}
// ボタン全体の状態更新
M5.update();
// ボタンA(M5)が押されたらカウンタリセット&画面リセット
if ( M5.BtnA.wasPressed() ) {
brushing_count = 0;
M5.Lcd.fillScreen(BLACK);
}
}
config.h
// Wi-Fiアクセスポイント
const char *ssid = "XXX";
const char *password = "XXX";
// Raspberry pi Node-RED
const char *nodered_server = "192.168.XXX.XXX";
Google Home周り(技術要素:Node-RED, google-home-notifier)
Raspberry Pi Zero W にNode-RED, google-home-notifier をインストールし、
Node-REDを以下の通り設定します。
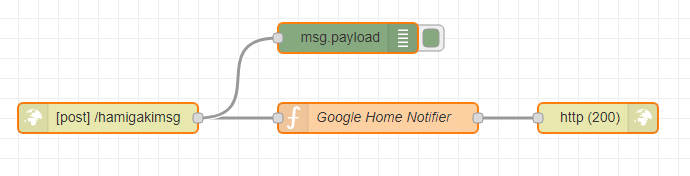
- M5StickCからのHTTPリクエストを受け付ける http in ノードを作成する。
- Function ノードにて、 google-home-notifier を呼びだす。
- http request ノードで状態コード 200 を返す。
function ノードで google-home-notifier を呼べるよう、メインの settings.js 内で、 functionGlobalContext を定義します。
~/.node-red/settings.js
functionGlobalContext: {
googlehomenotifier:require('[google-home-notifierパス]/google-home-notifier'),
},
function ノードは以下の記述だけで msg.payload.message に渡されたメッセージを Google Home が喋ってくれます。
functionノード
const googlehome = context.global.googlehomenotifier;
const language = 'ja';
googlehome.device("GoogleHome", language);
googlehome.ip("XXX.XXX.XXX.XXX");
googlehome.notify(msg.payload.message, function(res) {
console.log(res);
});
return msg;
所感
- 子どもに使ってもらったところ、想像以上に楽しそうに歯磨きしてくれてます。
- 作った本人としては、歯磨きの回数に応じて Google Home が喋るところがポイントでした。
- 使う側としては、音が出たり、歯磨き回数が表示される方が気に入ったようです。