初めに
 # googleHomeロボットとは
・ RaspberryPI-zeroW+googleHome-miniで作る(2019/1月作品)
・ 動き回る・・スマートスピーカ・ロボット
・ ローテションサーボで前後左右に動きます
・ カメラによる動画配信や写真を撮る事が出来ます
# googleHomeロボットとは
・ RaspberryPI-zeroW+googleHome-miniで作る(2019/1月作品)
・ 動き回る・・スマートスピーカ・ロボット
・ ローテションサーボで前後左右に動きます
・ カメラによる動画配信や写真を撮る事が出来ます
 # googleHomeロボットの部品
・ Raspbery Pi-zero-W+ラズパイ・カメラ
・ googleHomeMini @3000
・ ローテンションサーボ+タイヤ @700x2
・ OLEDディスプレイ(128x32) @440
・ 電池ボックス(単三 SW付) @100
・ リチウムイオン電池(14500)x2 @1500
・ ケース用アルミ板(1mm厚) @100
・ 制御基板(降圧モジュール7.4v→5v) @100
・ LED,SW制御部品+小物 @500
# googleHomeロボットの部品
・ Raspbery Pi-zero-W+ラズパイ・カメラ
・ googleHomeMini @3000
・ ローテンションサーボ+タイヤ @700x2
・ OLEDディスプレイ(128x32) @440
・ 電池ボックス(単三 SW付) @100
・ リチウムイオン電池(14500)x2 @1500
・ ケース用アルミ板(1mm厚) @100
・ 制御基板(降圧モジュール7.4v→5v) @100
・ LED,SW制御部品+小物 @500
■制作日誌は、以下のHPを参照してください
http://www.wtoy.net/static/googleHome/
制作のきっかけ
2018/12月にエレコムからmini用の時計スタンドが発売。
これを観てロボット化した方が可愛いと思った。^_^

こんな感じになりました

googleHomeロボットの加工手順-1
アルミ板で専用ケース、制御基板の作成とminiの改造(穴あけ)
■専用ケースの作成
アルミ板は、90x140mm厚さ1mmの物を使用し、miniとサーボを付けます。
型紙を作って事前に確認します。
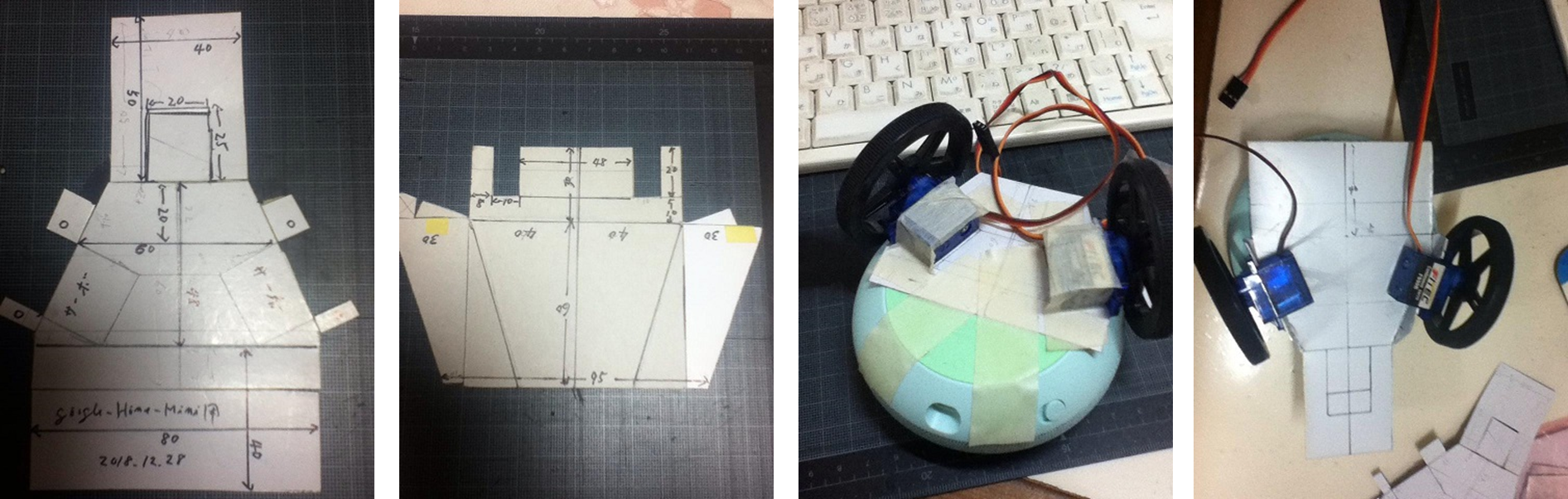
googleHomeロボットの加工手順-2
■専用ケースの作成
型紙から、アルミ板をカット&曲げて以下の形にします。(黒で塗装します)
先のでっぱりの部分に、miniが乗っかるように、少し丸めます。(コの字型)

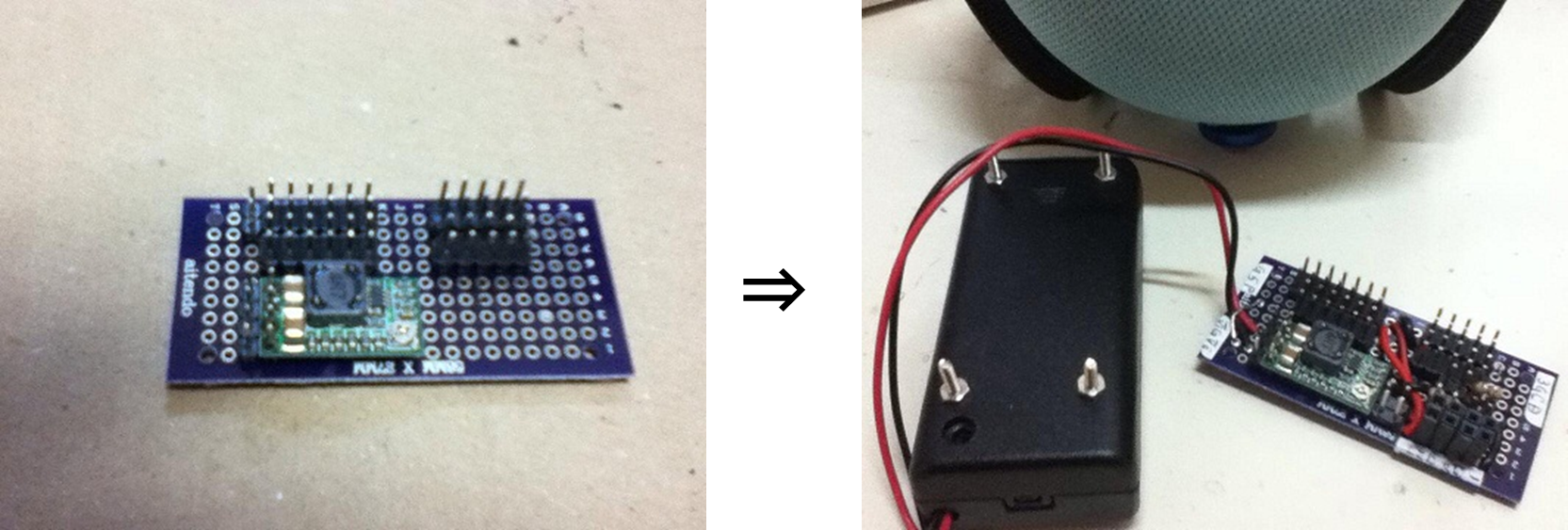
googleHomeロボットの加工手順-3
■制御基板の作成
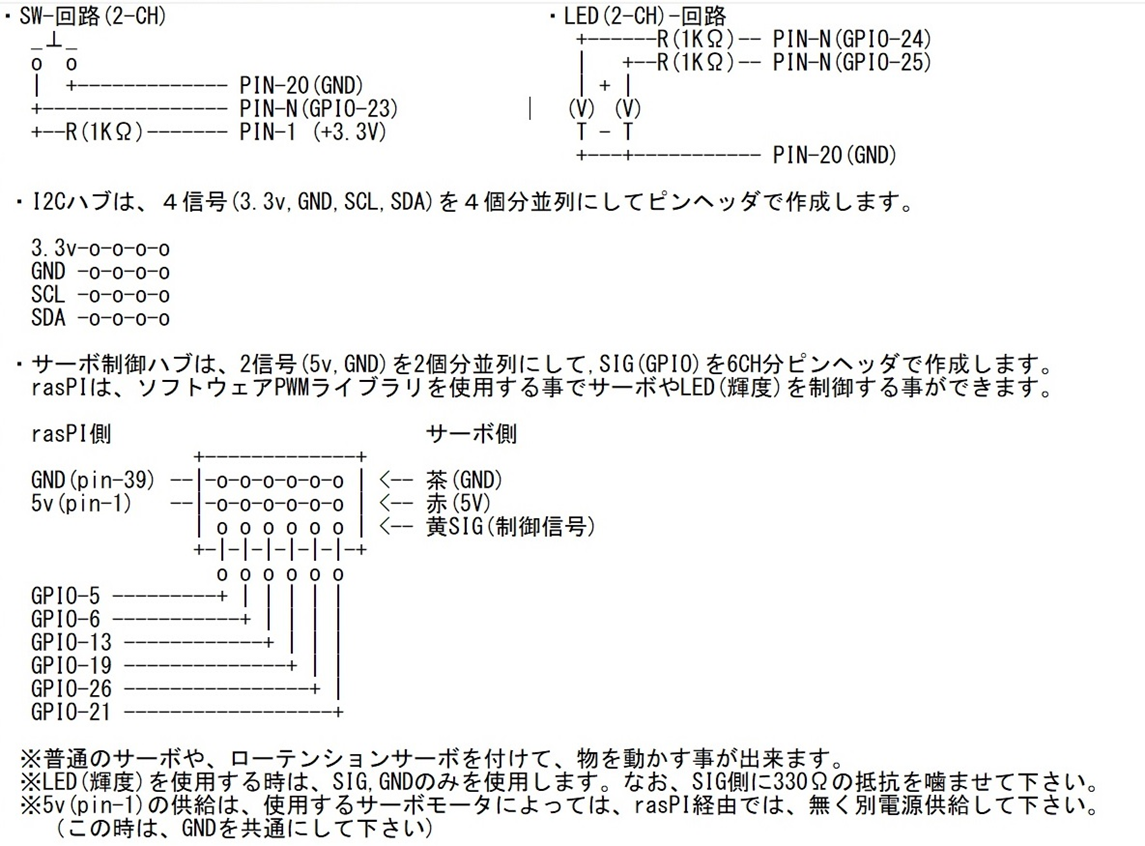
降圧モジュール(7.4v→5v)、サーボ制御ハブ(6ch)ソフトPMW用
I2Cハブ(4ch)、LED制御(2cH)、SW制御(2ch
制御基板は、電池Box(単三電池x2)の上に載せます。
googleHomeロボットの加工手順-4
■制御基板-簡易図
googleHomeロボットの加工手順-5
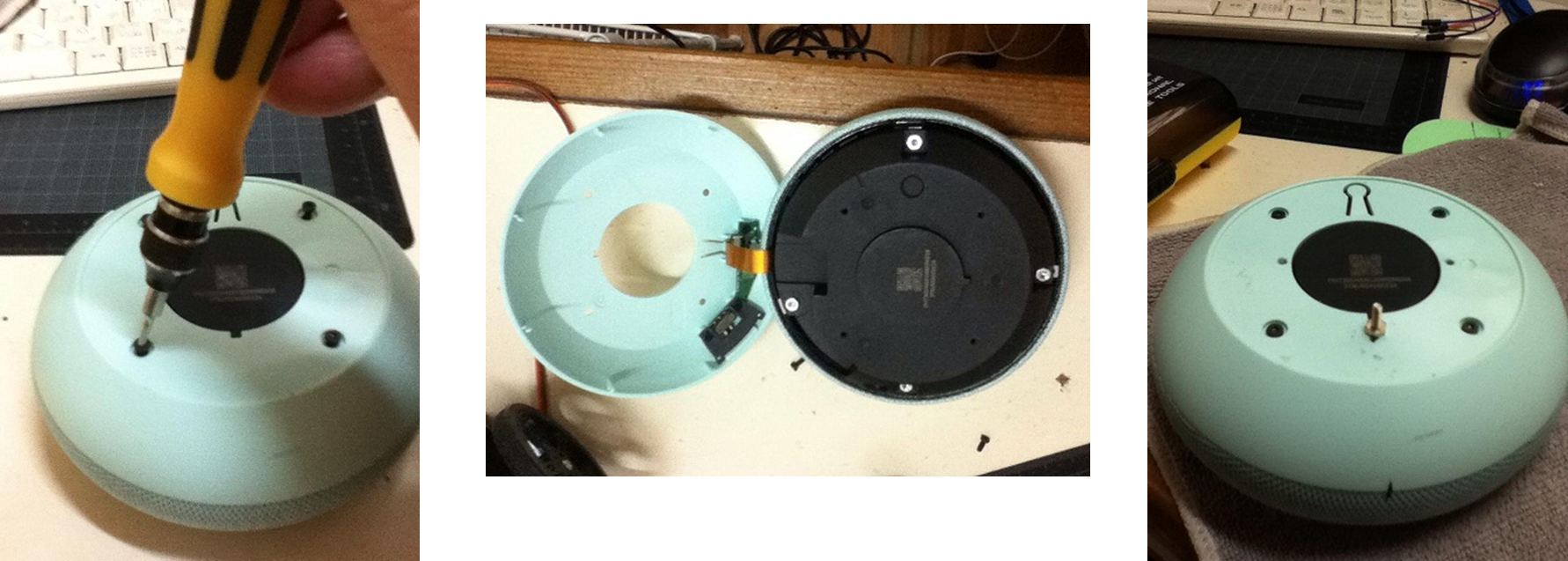
■googleHomeMini改造
専用ケースに固定する為、miniの底を外し、固定用のネジを取り付けます。
a)googleHomeMini底のゴムを外す(ドライヤ&フライパンで温めてはがす)

googleHomeロボットの加工手順-6
a)googleHomeMiniを開ける
薄い両面テープが残りますので、はがして、底に4箇所、星型のネジを外す
b)miniの底にネジを取り付け
2mmの穴を空け、2x10mmのネジ(平)をナットでケース固定用に取り付け
googleHomeロボットの加工手順-7
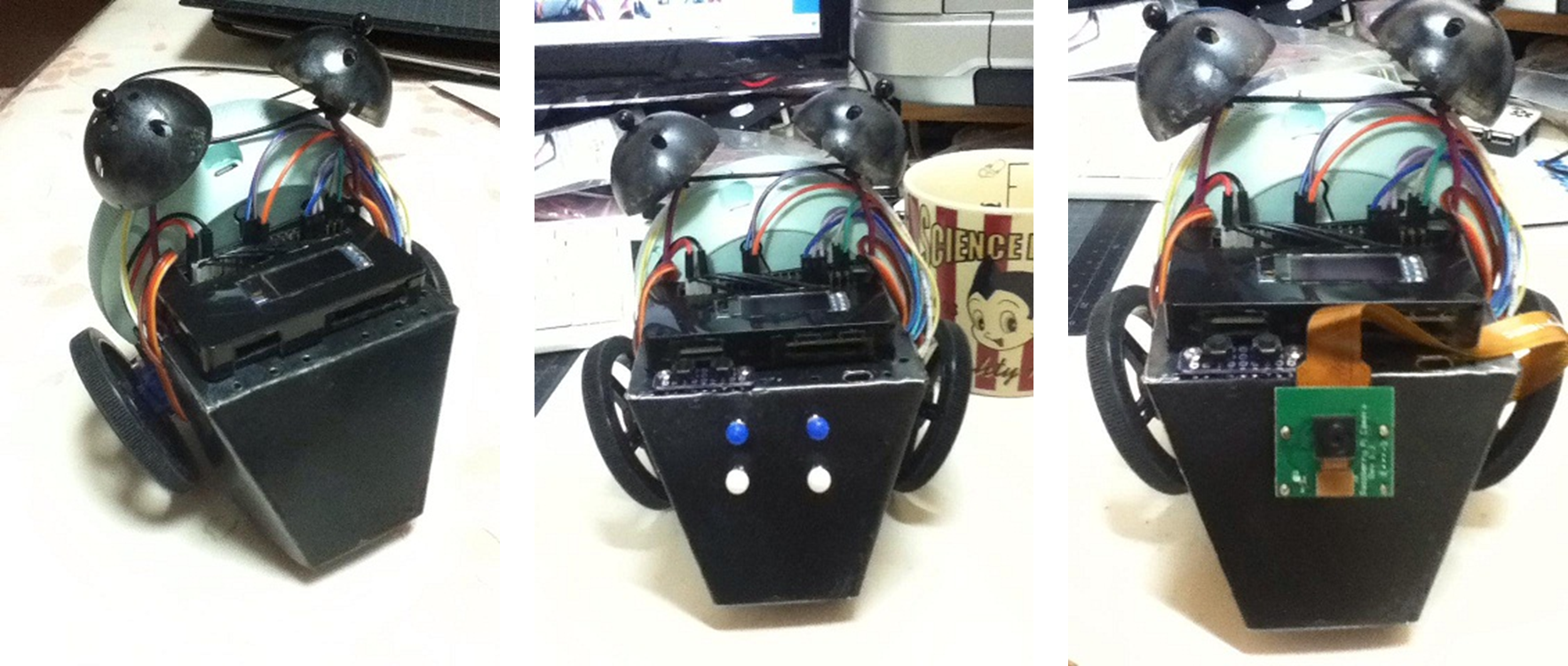
■組み立てと飾り付け
作成したパーツとfriskケース(rasPI-zero格納)+OLED(128x32)を合体
LEDをガチャポンケースに入れて目覚まし時計見たいにします。

googleHomeロボットの加工手順-8
■後ろにカバーとカメラを取り付け
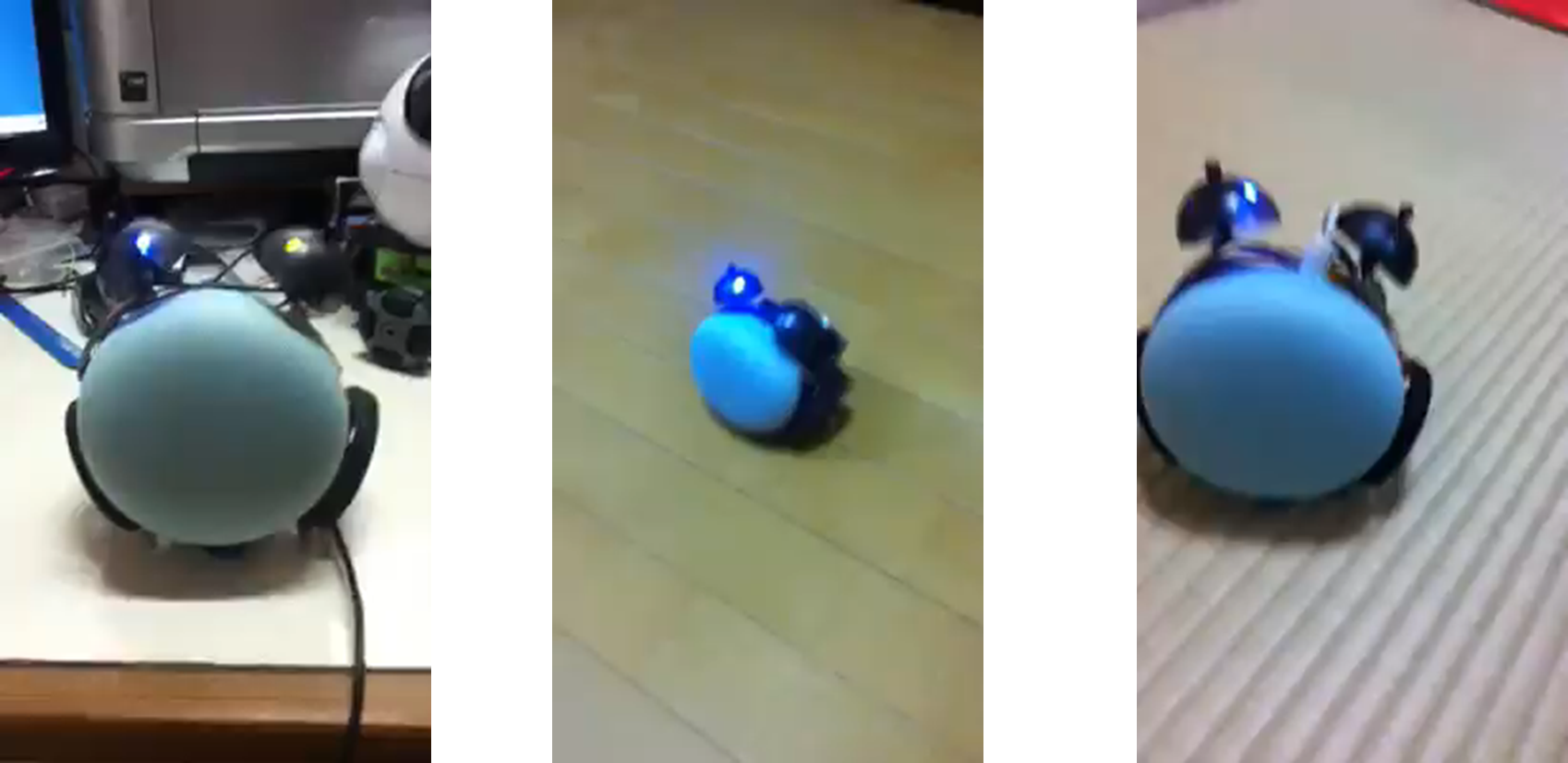
動かしたみた
■ LEDランプテスト ■ 走行テスト ■走行+googleHome