背景
最近仕事で新しく、サーボ系のチューニングをすることになりました。
そこで制御工学を改めて勉強したのですが、
よく理解できなかった感度関数と相補感度関数について、その理論的背景をまとめるとともに、
それを物理的にどう理解したらよいかを私が掴んだ観点から皆様に共有したいと思います。
ブロック図
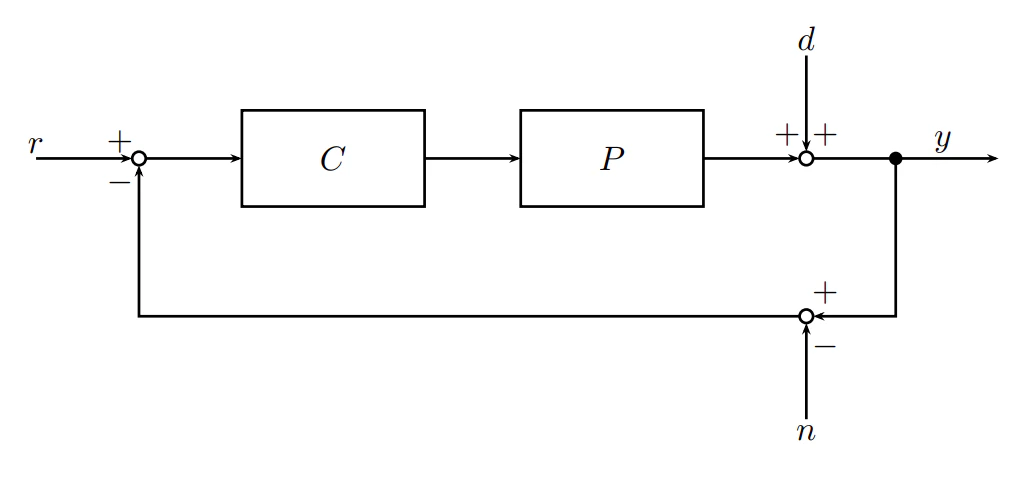
これをサーボ系だとみなす。
- $r$ : 位置指令
- $y$ : 現在位置
理論
上記ブロック図をベースとして感度関数と相補感度関数を定義する。
閉ループ伝達関数とは、
$ r \rightarrow y $への伝達関数、すなわち$\frac{y}{r}$が定義となる。
これを上記ブロック図から計算すると
\frac{y}{r} = \frac{PC}{1+PC}
となる。
感度関数$S$とは、
$ d \rightarrow y $への伝達関数、すなわち$\frac{y}{d}$が定義となる。
これを上記ブロック図から計算すると
S = \frac{y}{d} = \frac{1}{1+PC}
となる。
相補感度関数Tとは、
$ n \rightarrow y $への伝達関数、すなわち$\frac{y}{n}$が定義となる。
これを上記ブロック図から計算すると
T = \frac{y}{n} = \frac{PC}{1+PC}
よって、下記の関係
S + T = 1
が成り立つ。
解釈
感度関数とは現在位置$y$にそのまま乗っかってくる外乱$d$、たとえばサーボ系で言ったら不要な振動などが考えられるが、
そういったものが、実際の位置にどういう影響を与えるかを示すものである。
感度関数が0dB以下であれば、外部振動はサーボ系によって抑えられる。
逆に0dBより大きければ、外部振動はサーボ系によって拡大される。
相補感度関数とは現在位置$y$とは無関係に乗っかる外乱$n$、たとえばサーボ系で言ったらエンコーダなどにおる電気的ノイズなどが考えられるが、、
そういったものが、実際の位置にどういう影響を与えるかを示すものである。
相補感度関数が0dB以下であれば、ノイズはサーボ系に無視される。
逆に0dBより大きければ、ノイズによってサーボ系は不要な動きをしてしまう。
結論
感度関数、相補感度関数はそれぞれできるだけ小さくするひつようがある。
ただし、$S+T=1$の関係があるため、それぞれを独立に小さくすることはできない。
この次はそのトレードオフをどうするかについてまとめる。