ベクトル/行列演算の定番ライブラリEigen (日本語解説のサイトまとめと便利な機能紹介)
Eigenとは
C++の行列/ベクトルを扱うライブラリ(公式).
Eigenの主な特長
- 行列演算を直感的に書くことが出来る.
- ヘッダーファイルのみのライブラリのため,ライブラリのビルドやリンクが必要なく組み込やすい.
- 高速.他のライブラリとの比較ベンチマークはこちら(公式)
解説サイト(すべて日本語)
- Eigen - C++で使える線形代数ライブラリ(でらうま倶楽部)- 基本的な使い方とも幾何変換,クォータニオンなどの解説もあり.
- Eigen ー C++で線形代数を!(singular point)- 3回のポストで,幅広い機能について解説している.
- Robotics/Eigen(NAIST::OnlineText)- 基本的な機能の他に行列分解についても解説あり.
Eigenの使い方
Eigenはヘッダーのみのライブラリなので,ビルドやリンクは必要ない.
インクルードディレクトリにEigenのディレクトリに追加し,#includeするのみでOK.
# include <Eigen/Core> // 行列演算など基本的な機能.
Eigenの設定
Eigenはヘッダーオンリーのライブラリなので,ライブラリに関する設定はプリプロセッサで行う.Eigenのヘッダーをインクルードする前にマクロを定義することに注意.
// 1. マクロを定義.
# define EIGEN_NO_DEBUG // コード内のassertを無効化.
# define EIGEN_DONT_VECTORIZE // SIMDを無効化.
# define EIGEN_DONT_PARALLELIZE // 並列を無効化.
# define EIGEN_MPL2_ONLY // LGPLライセンスのコードを使わない.
// 2. Eigenをインクルード.
# include <Eigen/Core>
マクロの一覧はこちらhttps://eigen.tuxfamily.org/dox/TopicPreprocessorDirectives.html
配列のメモリ配置(Eigen::ColMajor/Eigen::RowMajor)
- 二次元配列には,メモリ空間上の並び順ColMajorとRowMajorがある.
- Eigenだけを使っているだけでは気にしなくてもよいことが多いが,
Eigen::Mapなどメモリ扱う場合には,ColMajor/RowMajorを意識する必要がある. - EigenはデフォルトでCol-major(列優先)なので,特にRowMajorで確保された配列を扱うときに注意.
/**
* もしmがColMajorならば,1 4 2 5 3 6
* もしmがRowMajorならば,1 2 3 4 5 6
*/
Matrix<int, 2, 3> m; // [2x3]の行列
m <<
1, 2, 3,
4, 5, 6;
for(int i=0; i<m.size(); ++i){
std::cout << *(m.data()+i) << " ";
}
RowMajor(行優先)を使う
/**
* 1. マクロで定義するパターン.
* デフォルトがRowMajorになる.
*/
# define EIGEN_DEFAULT_TO_ROW_MAJOR
/**
* 2. 型で指定するパターン.
* RowMajorとColMajorを混在させることもできる.
*/
Eigen::Matrix<float, -1, -1, Eigen::RowMajor>;
パフォーマンスを最適化する設定 (Visual studioの場合)
並列化やSIMD演算を有効にすることで高速化する.デバッグの無効化については自己責任で.( 公式ドキュメント1,公式ドキュメント2)
OpenMPの有効にする.
(プロジェクトのプロパティ⇒C/C++⇒言語⇒OpenMPをYesに設定)
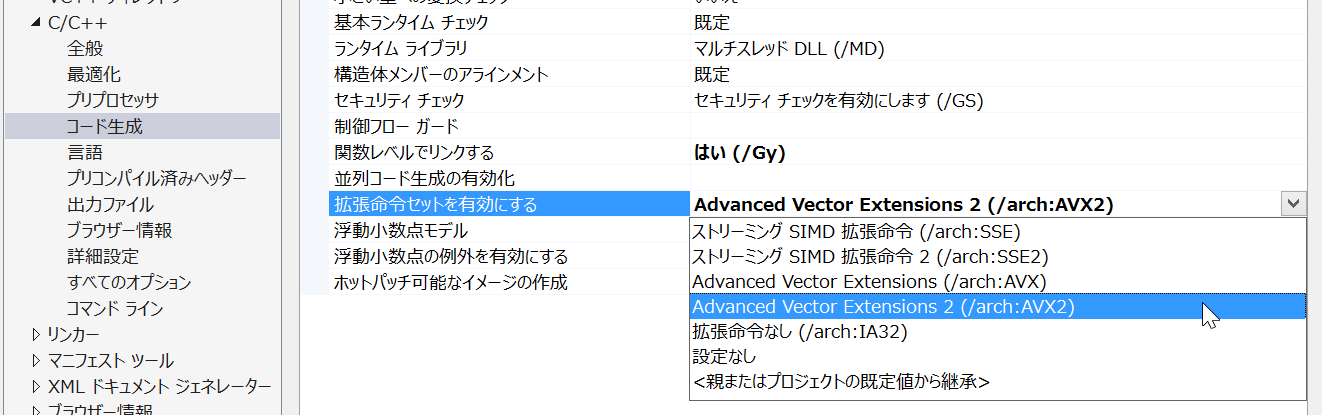
SIMDのサポートを有効にする.
(プロジェクトのProperty⇒C/C++⇒Code Generation⇒Enable Enhanced Instructionから有効にする命令を選択する)
有効になっているSIMD命令を確認する方法
Eigen::SimdInstructionSetsInUse()を用いる.
std::cout << Eigen::SimdInstructionSetsInUse() << std::endl;
//出力例: AVX SSE, SSE2, SSE3, SSSE3, SSE4.1, SSE4.2
SIMDの効果を確認するサンプルコード
//
// 行列積でSIMDの効果を確認するコード.
//
# include <iostream>
# include <chrono>
//#define EIGEN_DONT_VECTORIZE
# include <Eigen/Core>
int main(){
// 有効になっているSIMD命令を表示.
std::cout << "Available :SIMD Instructions: "<< Eigen::SimdInstructionSetsInUse() << std::endl;
const int d = 128; // 行列の次元.
const int n = 10000; // 繰り返し回数.
Eigen::VectorXd t(n); // 時間格納用.
for (int i = 0; i < n; ++i) {
Eigen::MatrixXf m1 = Eigen::MatrixXf::Random(d, d);
Eigen::MatrixXf m2 = Eigen::MatrixXf::Random(d, d);
const auto start = std::chrono::system_clock::now();
m1*=m2;
const auto end = std::chrono::system_clock::now();
t[i] = std::chrono::duration_cast<std::chrono::microseconds>(end - start).count(); //処理に要した時間をミリ秒に変換
}
std::cout << "Average: " << t.mean() << " ms." <<std::endl;
return 0;
}
著者の環境での実行結果
- SIMDなし(
#define EIGEN_DONT_VECTORIZEして実行): 861.54ms

- SIMDあり(
#define EIGEN_DONT_VECTORIZEをコメントアウトして実行): 149.527ms

便利な機能
確保済みの配列からEigen型に変換 Eigen::Map
-
Eigen::Mapを用いることで,確保済みの領域でEigenのオブジェクトを生成可能.コピーが発生しないので既存のコードの一部アルゴリズムをEigenで置き換えるときなどに便利. - 例えば,
Eigen::Map<Eigen::Vector3d>はEigen::Vector3dと同様に使うことができる(公式ドキュメント).
/**
* std::vectorからEigen::Vector3dを生成.
*/
std::vector<double> vec_std(3);
vec_std[0] = 1.0;
vec_std[1] = 2.0;
vec_std[2] = 3.0;
Eigen::Map<Eigen::Vector3d> vec(vec_std.data()); // Eigen::Vector3dとして使える.
行列,ベクトルの最大/最小値とそのインデックスを取得
maxCoeff(), minCoeff()を使って値とインデックスを取得できる.(公式ドキュメント)
//ベクトル型
Eigen::VectorXf::Index maxId;
float max = v.maxCoeff(&maxId);
Eigen::Vector3dXf::Index minId;
float min = v.maxCoeff(&minId);
//行列型
Eigen::MatrixXf::Index maxRow, maxCol;
float max = m.maxCoeff(&maxRow, &maxCol);
Eigen::MatrixXf::Index minRow, minCol;
float min = m.minCoeff(&minRow, &minCol);