はじめに
人の声でロボットを色々操作できて、ロボットと色々おしゃべりできたら面白いなあ、ということで音声認識・合成技術と市販の人型ロボットを組み合わせた何か(=ひとまず声太郎と命名)を作っていこうと思います。声で指示を出してポーズを取らせたり、歩かせたりできるようにするのが第一の目標です。ゆくゆくはできれば機械学習を用いて、より人間らしい歩き方をさせられたらなと思っています。私(小澤)が担当するのは主にロボットの動作の部分でもう一人の共同開発者に音声まわりをやってもらいます。
使用するロボット
使用するロボットは近藤科学さんの「KHR-3HV Ver.2」です。
ホビー用の小型二足歩行ロボットのなかでもかなりクオリティが高く、拡張パックを合わせて使用すると全体で22軸になります。
「人間らしい歩行」を獲得するには関節の自由度が多い必要があるでこのロボットを選びました。

注文した製品リスト
・KHR-3HV Ver.2 リフェバッテリー付きセット
・KHR-3HV拡張用サーボ5個セットVer.2
・KRC-5FH 送受信機セット
・ジャイロセンサーKRG-4
・RAS-3 Aセット(ZH⇔サーボコネクタ付属)
・ROBOパワーセル F3-850タイプ (Li-Fe)
・BluetoothモジュールKBT-1
ロボットの組み立て

注文していた製品が届いたのでさっそく組み立てていきます。
このロボットを買った他の人の記事なんかを見てると組み立てるのはそれほど難しくはなさそう...と思っていたのですが、甘かったです。
説明書は丁寧に作られているので、組み方がわからなくなる、ということはないのですが部品数が多いので結構時間がかかります(22軸もあったら当たり前ですね)。
半日くらいで組むつもりだったのですが、実際は40時間ほどかかってしまいました。
楽天とかで組み立て代行サービス(約2万円)を見かけたので、これを使うのもありですね。
とはいえ、自分が制御するロボットがどんな構造をしているのかを知ることは重要なので、今回はよしとします。
さて、本題に入ります。
組み立て説明書は拡張用サーボをつけない通常版の説明書と、拡張部分についての説明書に分かれています。
説明書の手順通りに行くと「通常版を組み立てる」→「拡張部を追加する」という流れになりますが、拡張部を追加するには一度組んだロボットを一部分解することになり、二度手間になるのでこの工程を一気に行います。
「部品の撮影」→「組み立て」→「組み立てたものの撮影」という順番で行ったので、部品を撮り終えてから組み立ての段階で「あれ?この部品じゃなかった…」ということがちょいちょい起きています(単に私のミスです)。
それと製品の全てが写真に写っているわけではありません。
ですので、実際に組み立てる方はこの記事ではなく説明書を見ながら組み立ててください。
この記事では、実際の組み立ての雰囲気を知っていただけたらと思います。
まずは胸ユニットから
使うパーツはこれです。
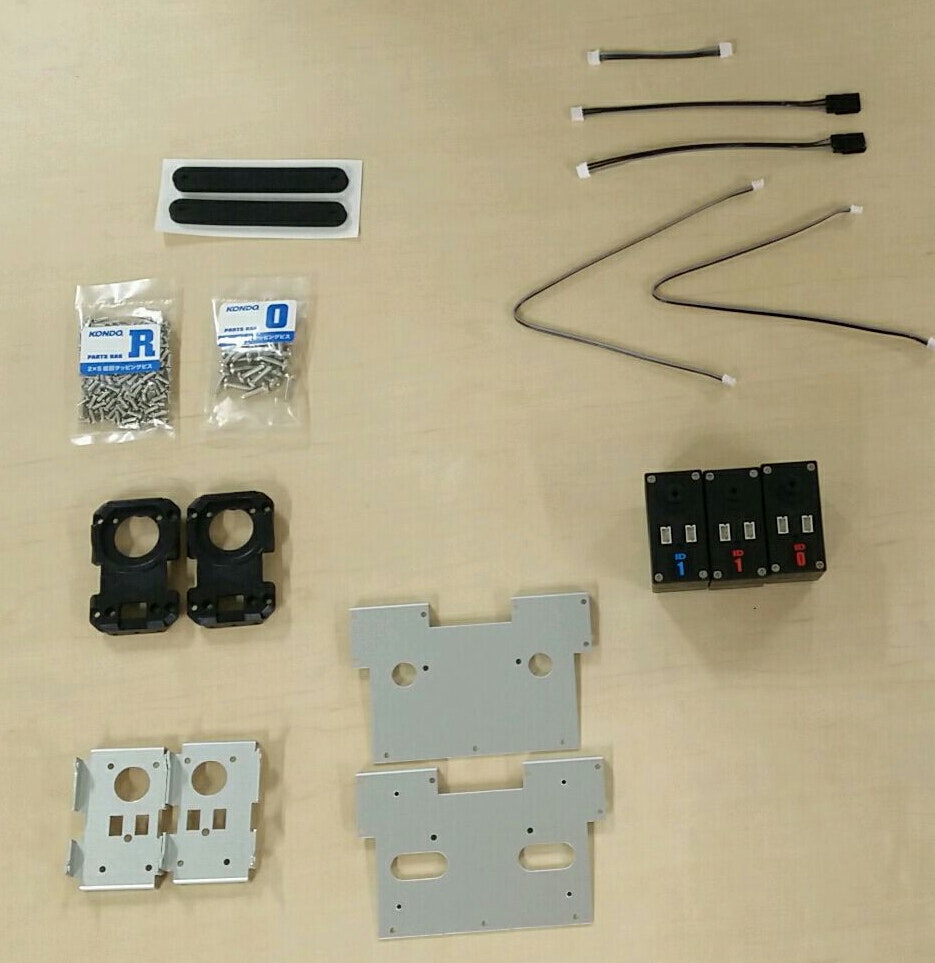
サーボにIDのシールが貼ってあってあるので、説明書の配置と同じになるように組んでいきます。
ちなみにIDは付属のソフトウェアで書き換えることができます。
組み立てるとこうなります。
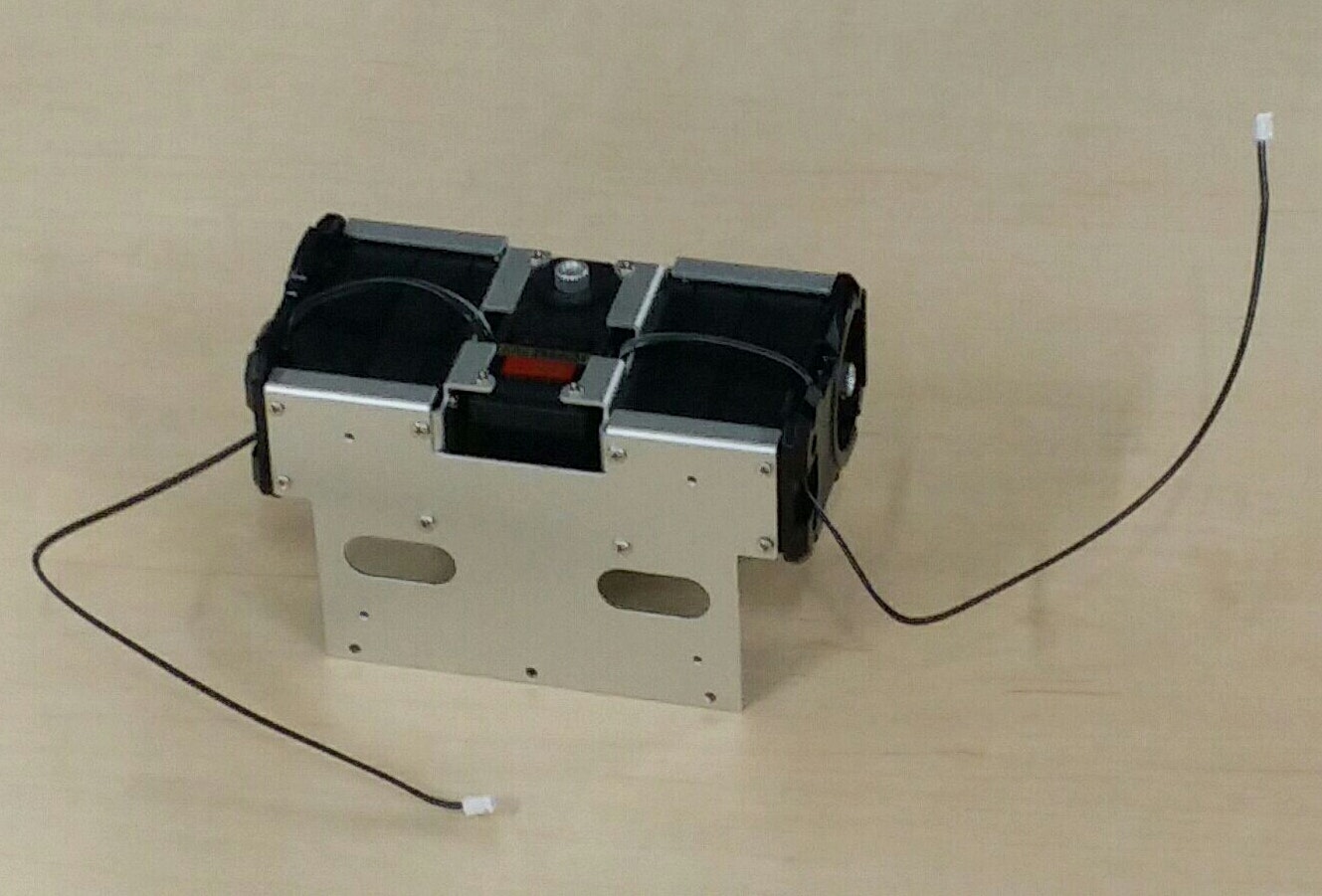
他のパーツも組み立てて行きます。
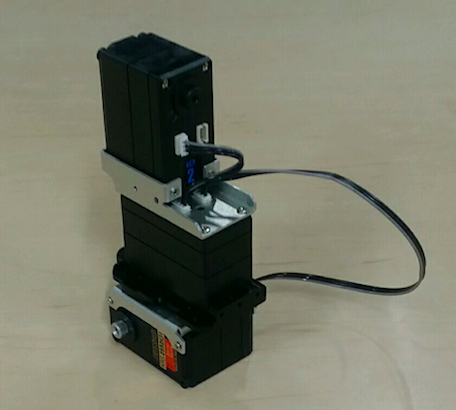
腰ユニット
腰ユニットは通常版ではダミーサーボで構成されていますが、このダミーサーボを拡張パックのサーボと入れ替えることで太ももの付根の回転と腰のひねり、合わせて3軸が追加されます。
腰ユニットのパーツ

上半身と足とのジョイントをつけて

こうなります

以下同じように他のパーツを組み立てます。
肘ユニット
パーツ
ユニット

手
手に使うパーツは左右で同じです。
親指をつける向きだけ反対にします。
パーツ

ユニット

太もも
太ももや膝から下は形から上と下がわかりにくいのでちょっと注意します。
パーツ

ユニット

膝から下

サーボの原点調整
ここまでで、主要パーツをあらかた組み終わりました
あとは各ユニットをジョイントでつなぎ、足をつけて、マイコン等を載せるバックパックを取り付ければ組み立ては完成です。
ここで、各ユニットをつなぐ前にサーボの原点調整と設定変更します。
説明書では(組み上げてしまうとアクセスできなくなるサーボがあるので)一番最初にやるようにかいてありましたが、どのサーボがどの部位なのかわかりにくいのでここまで組んでしまいました。
付属のCD-ROMに収録されているソフトウェアと写真のUSB端子のついたアダプタとケーブルとバッテリを使って原点調整をしていきます。それと同時に115200bpsに設定されているICS通信速度を22軸用サンプルプロジェクトに合わせ1250000bpsに変更します。拡張パックを使用しない場合はデフォルトの115200bpsのままにします。

ユニットの組み立て
原点調整を終え、サーボフォンを適切な位置につけたら各ユニットをつなぎます。
頭とソール(足)をつけるとこんな感じになります。
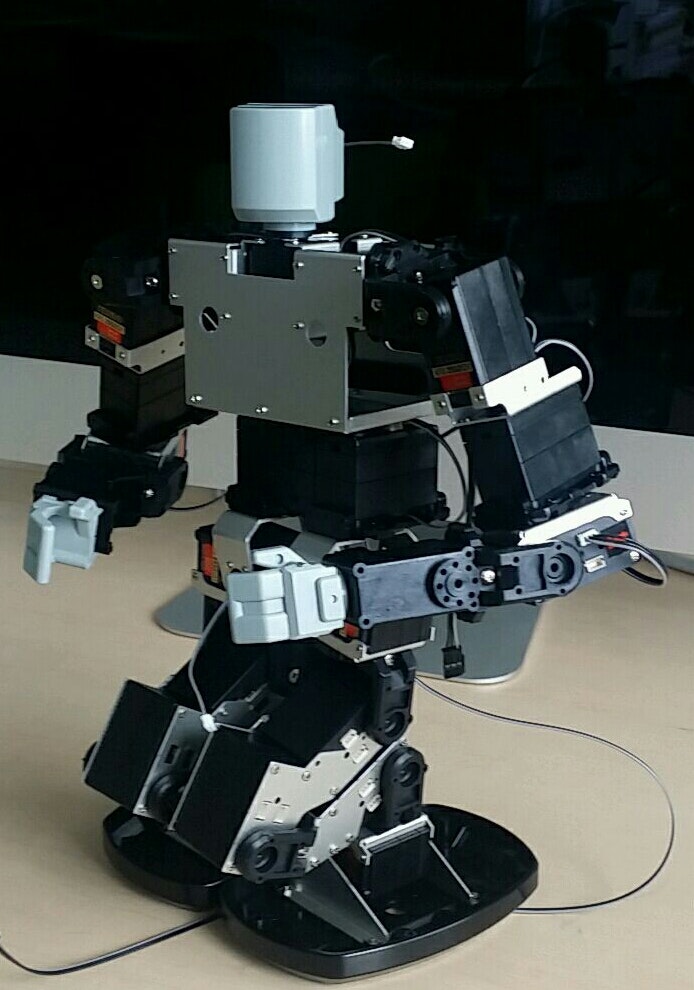
マイコンやセンサ類を載せるバックパックを搭載します。
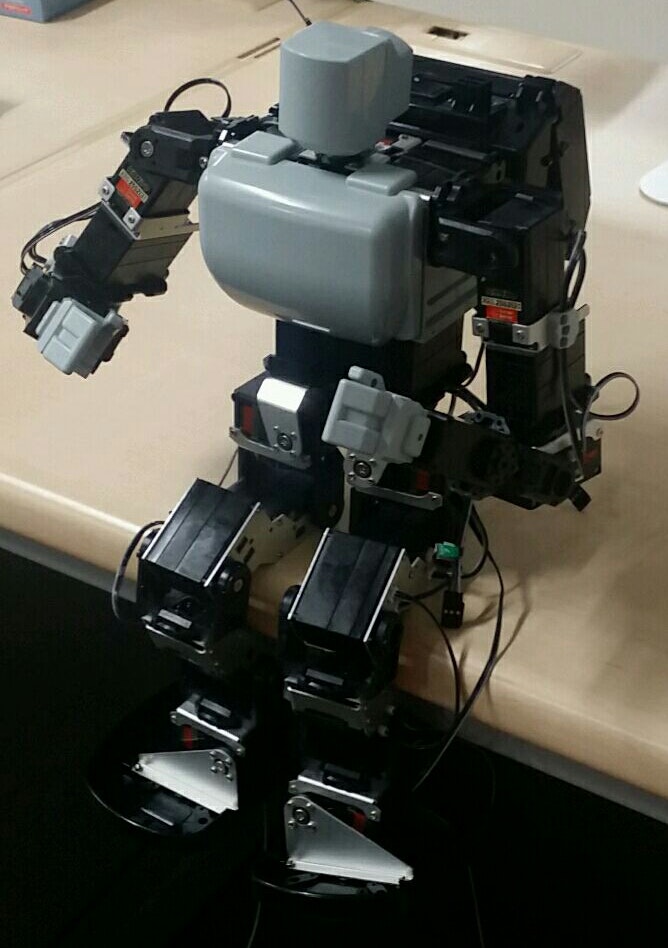
これで組み立ては終了です。
電源が入ってないと立たないので机のふちに座らせています。
早く動くところが見たいですね。