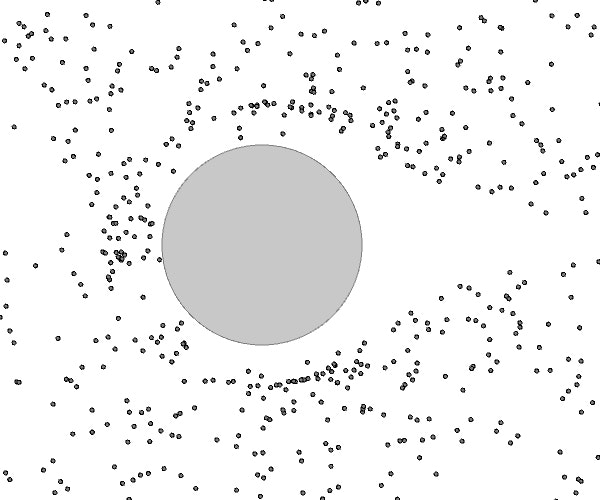
シフマンさんの自律エージェントを応用してグレーの円を回避するパーティクル群を作ってみました。
各パーティクルは右方向に移動するベクトルを持っていますが、円の付近に近づくと円の中心に対して
反対方向のベクトルが作用するように設定しています。しかし、円から離れたらまた右方向の流れに
戻したいので、PVector(自分のx + 100, 元いたy)にシフトするようにしています。
ArrayList<Agent> agents;
void setup () {
size (800, 600, P2D);
agents = new ArrayList<Agent> ();
for (int i = 0; i < 1000; i++) {
agents.add (new Agent (random (width), random (height), random (2, 4)));
}
}
void draw () {
background (255);
for (Agent a : agents) {
a.separate (agents);
a.update ();
a.border ();
a.render ();
}
if (agents.size () > 1200) {
agents.remove (0);
}
fill (200);
stroke (127);
ellipseMode (CENTER);
ellipse (mouseX, mouseY, 100 * 2, 100 * 2);
}
void mouseDragged () {
agents.add (new Agent (mouseX, mouseY, random (2, 4)));
}
class Agent {
PVector location;
PVector velocity;
PVector acceleration;
PVector circle;
PVector diff;
float r;
float maxforce;
float maxspeed;
float base_y;
Agent (float x, float y, float ms) {
location = new PVector (x, y);
velocity = new PVector (ms, 0);
acceleration = new PVector (0, 0);
diff = new PVector ();
r = 100.0;
maxforce = 0.2;
maxspeed = ms;
base_y = y;
}
void update () {
velocity.add (acceleration);
velocity.limit (maxspeed);
location.add (velocity);
acceleration.mult (0);
}
void render () {
fill (127);
stroke (0);
strokeWeight (1);
pushMatrix ();
translate (location.x, location.y);
ellipse (0, 0, 4, 4);
popMatrix ();
}
void applyForce (PVector force) {
acceleration.add (force);
}
void separate (ArrayList<Agent> agents) {
float desired_separation = r * 1.4;
circle = new PVector (mouseX, mouseY);
for (Agent a : agents) {
float d = PVector.dist (location, circle);
if ((d > 0) && (d < desired_separation)) {
PVector diff01 = PVector.sub (location, circle);
PVector diff02 = new PVector (maxspeed * abs (circle.y - location.y) * 0.8, 0);
diff = PVector.add (diff01, diff02);
diff.normalize ();
diff.div (d);
} else {
diff = PVector.sub (new PVector (velocity.x + 100, base_y - location.y), velocity);
diff.normalize ();
}
}
diff.setMag (maxspeed);
PVector steer = PVector.sub (diff, velocity);
steer.limit (maxforce);
applyForce (steer);
}
void border () {
if (location.x < -r) location.x = width + r;
if (location.y < -r) location.y = height + r;
if (location.x > width + r) location.x = -r;
if (location.y > height + r) location.y = -r;
}
}