ルネサス 岡宮さんが9月1日にプレゼンされた内容を元に作ったものです。
コンパイラーはWEBコンパイラー
http://tool-cloud2.renesas.com/
Wire*をWire2*にする。
*Wire.hはインクルードされるヘッダーファイルなのでいじらない事
なお、センサーのソースはこちらからです。
引用:https://playground.arduino.cc/Main/MPU-6050
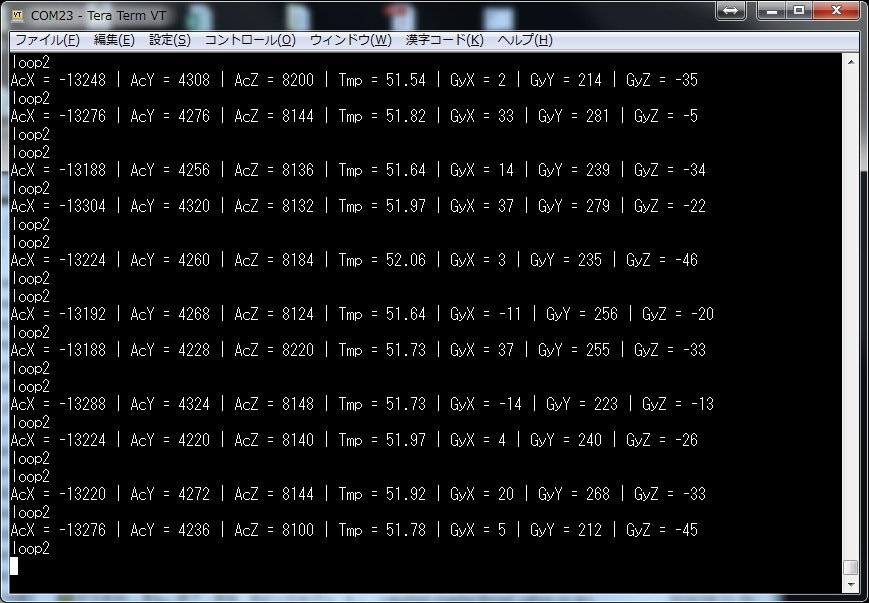
私だけかもしれませんが、loop2のPrintfが同期すると出力されない
または、センサーデータすら送らない
というケースが多かったです。
/* GR-ROSE Sketch template V0.01 */
/* https://playground.arduino.cc/Main/MPU-6050*/
#include <Arduino.h>
extern "C" {
#include "FreeRTOS.h"
#include "task.h"
#include<Wire.h>
}
const int MPU_addr=0x68; // I2C address of the MPU-6050
int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;
void loop2(void *pvParameters);
void setup() {
// LEDs
pinMode(PIN_LED0, OUTPUT);
pinMode(PIN_LED1, OUTPUT);
Wire2.begin();
Wire2.beginTransmission(MPU_addr);
Wire2.write(0x6B); // PWR_MGMT_1 register
Wire2.write(0); // set to zero (wakes up the MPU-6050)
Wire2.endTransmission(true);
Serial.begin(9600);
// loop task creation for sensing
xTaskCreate(loop2, "LOOP2", 512, NULL, 2, NULL);
}
void loop() {
Wire2.beginTransmission(MPU_addr);
Wire2.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire2.endTransmission(false);
Wire2.requestFrom(MPU_addr,14,true); // request a total of 14 registers
AcX=Wire2.read()<<8|Wire2.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY=Wire2.read()<<8|Wire2.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire2.read()<<8|Wire2.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
Tmp=Wire2.read()<<8|Wire2.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
GyX=Wire2.read()<<8|Wire2.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
GyY=Wire2.read()<<8|Wire2.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
GyZ=Wire2.read()<<8|Wire2.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
Serial.print("AcX = "); Serial.print(AcX);
Serial.print(" | AcY = "); Serial.print(AcY);
Serial.print(" | AcZ = "); Serial.print(AcZ);
Serial.print(" | Tmp = "); Serial.print(Tmp/340.00+36.53); //equation for temperature in degrees C from datasheet
Serial.print(" | GyX = "); Serial.print(GyX);
Serial.print(" | GyY = "); Serial.print(GyY);
Serial.print(" | GyZ = "); Serial.println(GyZ);
vTaskDelay(770);
}
void loop2(void *pvParameters) {
while (1) {
digitalWrite(PIN_LED1, !digitalRead(PIN_LED1));
Serial.println("loop2");
vTaskDelay(500);
}
}