前回の記事:
https://qiita.com/uribo_2019/items/fca369067b514177ff6b
GPIO操作しLチカまでできました。
今回はサーボモータを動かしてみます。
GPIO端子操作 – サーボモーター
サーボモーター接続
SG92Rというモーターで試してみます。5v, Ground、GPIO端子の3本を接続します。

まず、接続先のGPIO端子を決めます。
GPIO端子ピン配置は、以下WEBサイトに記載されています。
https://www.raspberrypi.org/documentation/usage/gpio/
このサイトから画像を引用させて頂きます。
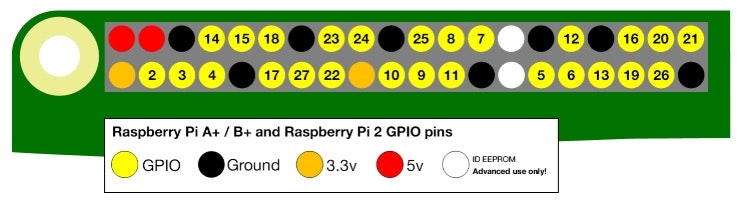
今回はGPIO端子の14番を使う事にします。
Groundと5v端子は、それぞれRaspberry piのそれぞれの端子に接続します。
今回サーボモータ一つなので別電源にするまでもなく、VCCはRaspberry piの5Vに直接接続します。
Raspberry piとサーボモータとを接続する前に、Raspberry piをシャットダウンし、電源を切ってください。
実際に接続してみました。

スクリプト作成
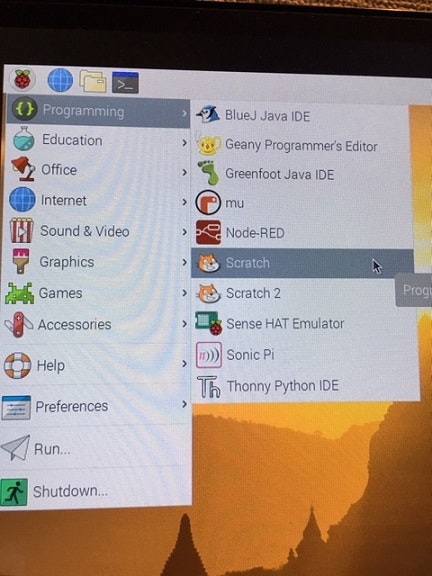
サーボモータが接続できれば、Raspberry piの電源を入れ、Scratchを起動してください。
まず、GPIO端子の操作が有効になっているかどうか確認してください。
“へんしゅう”メニューから、“GPIOサーバをていし”が見えると、有効になっています。

ここから、GPIO端子14を操作するブロックをつなげていきます。
“せいぎょ”カテゴリーから、“「」をおくる”を3つ選択し、メッセージとしてそれぞれ“config14out“, “servo14%75“, “servo14%-75“と記入してください。

“servo14%75“メッセージは、サーボモータを75%回します。
“servo14%-75“メッセージは、サーボモータを逆方向に75%回します。
それでは、これらの制御ブロックをつなげてみます。
前回記事で作成した、LEDを一秒間隔で点灯・消灯するスクリプトの間に、サーボモーターを制御するブロックをいれてみましょう。

GPIOサーバの自動起動
GPIOサーバをスクリプト内で起動するようにします。

“gpioserveronをおくる”を追加すればOKです。
このスクリプトを実行すると、LEDが点滅を繰り返し、同時にサーボモータが回ります。