はじめに
3Dの情報を使って機械学習をしていきたいので、とりあえず3DMNISTを使って練習してみました。
Kaggleのノートブックでの実装になります。ローカルでの動作は確認していません。
実装
こちらの実装を参考にしました。
https://www.kaggle.com/code/michaelcripman/3d-mnist-basic-cnn-adorable-visualisations/comments
データ読み込み
Kaggle上で3DMNISTのデータが公開されているので、それを使います。
https://www.kaggle.com/datasets/daavoo/3d-mnist/data
with h5py.File("../input/3d-mnist/full_dataset_vectors.h5", "r") as hf:
# Split the data into training/test features/targets
x_train = hf["X_train"][:]
y_train = hf["y_train"][:]
x_test = hf["X_test"][:]
y_test = hf["y_test"][:]
print(f"Before x_train size:{x_train.shape}")
print(f"Before x_test size:{x_test.shape}")
"""出力
Before x_train size:(10000, 4096)
Before x_test size:(2000, 4096)
"""
データ変換
3DのCNNをしたいので3次元に直します。x_trainの中身は1行に4096(16x16x16)要素入っているので、16x16x16の3次元に変換します。
3次元の配列がちょっとイメージしにくかったのですが、@ken_yoshiさんの下記の記事で改めてイメージできました。
def prepare_points(tensor, data_config, threshold = False):
if threshold:
"""
thresholdに何か入ってれば値を0 or 1にする
"""
tensor = np.where(
tensor > data_config['threshold'],
data_config['lower'],
data_config['upper']
)
tensor = tensor.reshape((
tensor.shape[0],
data_config['y_shape'], # = 16
data_config['x_shape'], # = 16
data_config['z_shape'] # = 16
))
return tensor
x_train = prepare_points(x_train, data_config)
x_test = prepare_points(x_test, data_config)
print(f"After x_train size:{x_train.shape}")
print(f"After x_test size:{x_test.shape}")
"""出力
After x_train size:(10000, 16, 16, 16)
After x_test size:(2000, 16, 16, 16)
"""
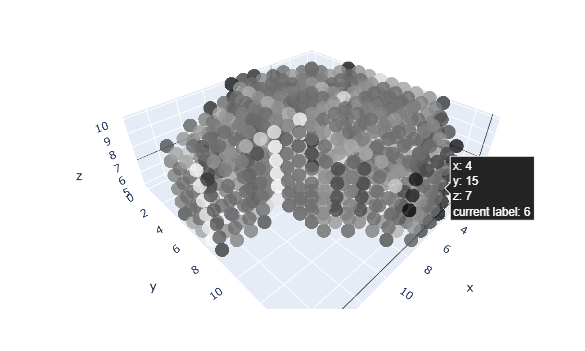
可視化
3次元に変換したのでいくつか見てみます。
for index in range(3):
plot_idx = random.randint(0, x_train.shape[0]) # 適当に選ぶ
plot_img_3d = x_train[plot_idx]
plot_label = y_train[plot_idx]
plot_data = []
for x in range(data_config['x_shape']): # x座標取得
for y in range(data_config['y_shape']): # y座標取得
for z in range(data_config['z_shape']): # z座標取得
val = int(plot_img_3d[x, y, z] * 255) # 0 ~ 255に変換する
plot_data.append([x, y, z, val])
plot_df = pd.DataFrame(plot_data, columns=["x", "y", "z", "val"])
plot_df = plot_df.loc[plot_df["val"] > 0]
fig = go.Figure(data=[go.Scatter3d(x=plot_df['x'], y=plot_df['y'], z=plot_df['z'],
mode='markers',
text=f"current label: {plot_label.nonzero()[0][0]}",
marker=dict(
color = [f'rgb({c}, {c}, {c})' for c in plot_df['val']],
size=6,
colorscale='Plotly3',
opacity=0.8))])
fig.show()
モデル
3層+全結合のモデルを作ります。扱うデータが3次元というだけで実装的には2次元と一緒です。
class CNN3D(nn.Module):
def __init__(self, in_channels):
super().__init__()
self.relu = nn.ReLU()
self.maxpool = nn.MaxPool3d((2, 2, 2))
self.conv1 = nn.Conv3d(in_channels, 16, kernel_size=(3,3,3), padding='same')
self.bn1 = nn.BatchNorm3d(16)
self.conv2 = nn.Conv3d(16, 32, kernel_size=(3,3,3), padding='same')
self.bn2 = nn.BatchNorm3d(32)
self.conv3 = nn.Conv3d(32, 16, kernel_size=(3,3,3), padding='same')
self.bn3 = nn.BatchNorm3d(16)
self.flat = nn.Flatten()
self.ln = nn.Linear(128, 10) # (16/2/2/2)^3*16
def forward(self, x):
# 1層目
x = self.conv1(x)
x = self.bn1(x)
x = self.maxpool(x)
x = self.relu(x)
# 2層目
x = self.conv2(x)
x = self.bn2(x)
x = self.maxpool(x)
x = self.relu(x)
# 3層目
x = self.conv3(x)
x = self.bn3(x)
x = self.maxpool(x)
x = self.relu(x)
# 全結合
x = self.flat(x)
x = self.ln(x)
return x
学習
weight_decayは正則化項のようなもので過学習を抑制してくれるようです。
学習部分のコードも2次元のものと変わりありませんでした。
model = CNN3D(1) # インスタンス化
loss_fn = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=train_config['lr'], weight_decay=train_config['weight_decay'])
history = {'train_loss': []}
n = 0
for epoch in range(train_config['epochs']):
train_loss = 0
acc = 0
model.train()
for i, data in enumerate(train_loader):
inputs, labels = data['train'].to(device), data['target'].to(device)
optimizer.zero_grad()
outputs = model(inputs)
loss = loss_fn(outputs, labels)
loss.backward()
optimizer.step()
train_loss += loss.item()
out_label = torch.argmax(outputs, dim=1)
label = torch.argmax(labels, dim=1)
acc += (out_label == label).sum().item() / (len(labels))
n += 1
if i % (len(x_train)//train_config['batch_size']//5) == (len(x_train)//train_config['batch_size']//5)-1:
print(f"epoch:{epoch+1} index:{i+1} train_loss:{train_loss/n:.3f} ACC:{acc/n:.3f}")
n = 0
train_loss = 0
acc = 0
model.eval()
for j, data_ in enumerate(test_loader):
inputs_, labels_ = data_['train'].to(device), data_['target'].to(device)
output = model(inputs_)
loss_ = loss_fn(output, labels_)
acc_ = (torch.argmax(output, dim=1) == torch.argmax(labels_, dim=1)).sum().item() / (len(labels_))
print(f"EVAL_LOSS:{loss_/len(label):.3f} EVAL_ACC:{acc_:.3f}")
"""出力
epoch:1 index:62 train_loss:2.109 ACC:0.274
epoch:1 index:124 train_loss:1.633 ACC:0.474
epoch:1 index:186 train_loss:1.367 ACC:0.543
epoch:1 index:248 train_loss:1.255 ACC:0.582
epoch:1 index:310 train_loss:1.148 ACC:0.618
EVAL_LOSS:0.071 EVAL_ACC:0.622
epoch:2 index:62 train_loss:1.070 ACC:0.592
epoch:2 index:124 train_loss:1.058 ACC:0.648
epoch:2 index:186 train_loss:0.988 ACC:0.668
epoch:2 index:248 train_loss:1.048 ACC:0.640
epoch:2 index:310 train_loss:1.031 ACC:0.645
EVAL_LOSS:0.064 EVAL_ACC:0.627
epoch:3 index:62 train_loss:0.892 ACC:0.652
epoch:3 index:124 train_loss:0.975 ACC:0.662
epoch:3 index:186 train_loss:0.974 ACC:0.667
epoch:3 index:248 train_loss:0.858 ACC:0.702
epoch:3 index:310 train_loss:0.892 ACC:0.697
EVAL_LOSS:0.063 EVAL_ACC:0.640
epoch:4 index:62 train_loss:0.748 ACC:0.692
epoch:4 index:124 train_loss:0.845 ACC:0.710
epoch:4 index:186 train_loss:0.786 ACC:0.737
epoch:4 index:248 train_loss:0.850 ACC:0.715
epoch:4 index:310 train_loss:0.837 ACC:0.722
EVAL_LOSS:0.055 EVAL_ACC:0.695
epoch:5 index:62 train_loss:0.689 ACC:0.732
epoch:5 index:124 train_loss:0.709 ACC:0.764
epoch:5 index:186 train_loss:0.757 ACC:0.731
epoch:5 index:248 train_loss:0.708 ACC:0.754
epoch:5 index:310 train_loss:0.735 ACC:0.746
EVAL_LOSS:0.057 EVAL_ACC:0.686
epoch:6 index:62 train_loss:0.588 ACC:0.760
epoch:6 index:124 train_loss:0.627 ACC:0.790
epoch:6 index:186 train_loss:0.675 ACC:0.777
epoch:6 index:248 train_loss:0.662 ACC:0.768
epoch:6 index:310 train_loss:0.650 ACC:0.772
EVAL_LOSS:0.066 EVAL_ACC:0.648
epoch:7 index:62 train_loss:0.532 ACC:0.785
epoch:7 index:124 train_loss:0.521 ACC:0.835
epoch:7 index:186 train_loss:0.591 ACC:0.803
epoch:7 index:248 train_loss:0.586 ACC:0.800
epoch:7 index:310 train_loss:0.612 ACC:0.796
EVAL_LOSS:0.058 EVAL_ACC:0.690
epoch:8 index:62 train_loss:0.449 ACC:0.815
epoch:8 index:124 train_loss:0.463 ACC:0.848
epoch:8 index:186 train_loss:0.517 ACC:0.827
epoch:8 index:248 train_loss:0.552 ACC:0.815
epoch:8 index:310 train_loss:0.552 ACC:0.809
EVAL_LOSS:0.053 EVAL_ACC:0.717
epoch:9 index:62 train_loss:0.407 ACC:0.828
epoch:9 index:124 train_loss:0.424 ACC:0.856
epoch:9 index:186 train_loss:0.435 ACC:0.860
epoch:9 index:248 train_loss:0.452 ACC:0.846
epoch:9 index:310 train_loss:0.511 ACC:0.830
EVAL_LOSS:0.077 EVAL_ACC:0.625
epoch:10 index:62 train_loss:0.368 ACC:0.842
epoch:10 index:124 train_loss:0.364 ACC:0.888
epoch:10 index:186 train_loss:0.384 ACC:0.873
epoch:10 index:248 train_loss:0.416 ACC:0.862
epoch:10 index:310 train_loss:0.408 ACC:0.865
EVAL_LOSS:0.058 EVAL_ACC:0.704
"""
終わりに
GNNとかも実装してみようと思います。
参考記事
Kaggle 3D MNIST https://www.kaggle.com/datasets/daavoo/3d-mnist/data
全コード
import numpy as np
import polars as pl
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torch.utils.data import DataLoader
from torch.utils.data import Dataset
from sklearn.metrics import r2_score
from torchvision import models, transforms
import h5py
import matplotlib.pyplot as plt
import seaborn as sns
import plotly
import sklearn
import pandas as pd
import random
import tqdm
import plotly.express as px
import plotly.graph_objects as go
from dataclasses import dataclass
import os
from sklearn.preprocessing import OneHotEncoder
# 前処理用
data_config = {
'threshold':0.2,
'upper':1,
'lower':0,
'x_shape':16,
'y_shape':16,
'z_shape':16
}
train_config = {
'lr':0.001,
'epochs':10,
'batch_size':32,
'weight_decay':0.001
}
with h5py.File("../input/3d-mnist/full_dataset_vectors.h5", "r") as hf:
# Split the data into training/test features/targets
x_train = hf["X_train"][:]
y_train = hf["y_train"][:]
x_test = hf["X_test"][:]
y_test = hf["y_test"][:]
print(f"Before x_train size:{x_train.shape}")
print(f"Before x_test size:{x_test.shape}")
def prepare_points(tensor, data_config, threshold = False):
"""
thresholdに何か入ってれば値を0 or 1にする
"""
if threshold:
tensor = np.where(
tensor > data_config['threshold'],
data_config['lower'],
data_config['upper']
)
tensor = tensor.reshape((
tensor.shape[0],
data_config['y_shape'],
data_config['x_shape'],
data_config['z_shape']
))
return tensor
# apply threshold and reshaping given tensors
print(f"Before x_train size:{x_train.shape}")
print(f"Before x_test size:{x_test.shape}")
print(f"Before Unique value:{np.unique(x_train)}")
x_train = prepare_points(x_train, data_config)
x_test = prepare_points(x_test, data_config)
print(f"After x_train size:{x_train.shape}")
print(f"After x_test size:{x_test.shape}")
print(f"After Unique value:{np.unique(x_train)}")
# apply one-hot-encoding to given labels
encoder = OneHotEncoder(sparse_output = False)
y_train = encoder.fit_transform(y_train.reshape((y_train.shape[0], 1)))
y_test = encoder.fit_transform(y_test.reshape((y_test.shape[0], 1)))
print(f"y_train size:{y_train.shape}")
print(f"y_test size:{y_test.shape}")
for index in range(3):
plot_idx = random.randint(0, x_train.shape[0]) # 適当に選ぶ
plot_img_3d = x_train[plot_idx]
plot_label = y_train[plot_idx]
plot_data = []
for x in range(data_config['x_shape']): # x座標取得
for y in range(data_config['y_shape']): # y座標取得
for z in range(data_config['z_shape']): # z座標取得
val = int(plot_img_3d[x, y, z] * 255) # 0 ~ 255に変換する
plot_data.append([x, y, z, val])
plot_df = pd.DataFrame(plot_data, columns=["x", "y", "z", "val"])
plot_df = plot_df.loc[plot_df["val"] > 0]
fig = go.Figure(data=[go.Scatter3d(x=plot_df['x'], y=plot_df['y'], z=plot_df['z'],
mode='markers',
text=f"current label: {plot_label.nonzero()[0][0]}",
marker=dict(
color = [f'rgb({c}, {c}, {c})' for c in plot_df['val']],
size=6,
colorscale='Plotly3',
opacity=0.8))])
fig.show()
class CNN3D(nn.Module):
def __init__(self, in_channels):
super().__init__()
self.relu = nn.ReLU()
self.maxpool = nn.MaxPool3d((2, 2, 2))
self.conv1 = nn.Conv3d(in_channels, 16, kernel_size=(3,3,3), padding='same')
self.bn1 = nn.BatchNorm3d(16)
self.conv2 = nn.Conv3d(16, 32, kernel_size=(3,3,3), padding='same')
self.bn2 = nn.BatchNorm3d(32)
self.conv3 = nn.Conv3d(32, 16, kernel_size=(3,3,3), padding='same')
self.bn3 = nn.BatchNorm3d(16)
self.flat = nn.Flatten()
self.ln = nn.Linear(128, 10) # (16/2/2/2)^3*16
def forward(self, x):
# 1層目
x = self.conv1(x)
x = self.bn1(x)
x = self.maxpool(x)
x = self.relu(x)
# 2層目
x = self.conv2(x)
x = self.bn2(x)
x = self.maxpool(x)
x = self.relu(x)
# 3層目
x = self.conv3(x)
x = self.bn3(x)
x = self.maxpool(x)
x = self.relu(x)
# 全結合
x = self.flat(x)
x = self.ln(x)
return x
class CustomDataset(Dataset):
def __init__(self, train, target):
self.train = train
self.target = target
def __getitem__(self, index):
train_data = self.train[index]
target_data = self.target[index]
train_data = torch.from_numpy(np.expand_dims(train_data, axis=0).astype(np.float32))
target_data = torch.from_numpy(target_data.astype(np.float32))
data = {'train':train_data, 'target':target_data}
return data
def __len__(self):
return len(self.train)
train_dataset = CustomDataset(x_train, y_train)
print('TRAIN Dataset size:', dataset[1]['train'].shape)
train_loader = DataLoader(train_dataset, batch_size=train_config['batch_size'], shuffle=True)
test_dataset = CustomDataset(x_test, y_test)
print('TEST Dataset size:', dataset[1]['train'].shape)
test_loader = DataLoader(test_dataset, batch_size=len(x_test), shuffle=True)
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
print(f"Now, using {device}")
model = CNN3D(1) # インスタンス化
loss_fn = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=train_config['lr'], weight_decay=train_config['weight_decay'])
history = {'train_loss': []}
n = 0
for epoch in range(train_config['epochs']):
train_loss = 0
acc = 0
model.train()
for i, data in enumerate(train_loader):
inputs, labels = data['train'].to(device), data['target'].to(device)
optimizer.zero_grad()
outputs = model(inputs)
loss = loss_fn(outputs, labels)
loss.backward()
optimizer.step()
train_loss += loss.item()
out_label = torch.argmax(outputs, dim=1)
label = torch.argmax(labels, dim=1)
acc += (out_label == label).sum().item() / (len(labels))
n += 1
if i % (len(x_train)//train_config['batch_size']//5) == (len(x_train)//train_config['batch_size']//5)-1:
print(f"epoch:{epoch+1} index:{i+1} train_loss:{train_loss/n:.3f} ACC:{acc/n:.3f}")
n = 0
train_loss = 0
acc = 0
model.eval()
for j, data_ in enumerate(test_loader):
inputs_, labels_ = data_['train'].to(device), data_['target'].to(device)
output = model(inputs_)
loss_ = loss_fn(output, labels_)
acc_ = (torch.argmax(output, dim=1) == torch.argmax(labels_, dim=1)).sum().item() / (len(labels_))
print(f"EVAL_LOSS:{loss_/len(label):.3f} EVAL_ACC:{acc_:.3f}")