モチベーション
製品の性能予測を機械学習を使ってやっていこうという機運が高まる中、解釈性・物理的な整合性などに悩まされている中で出会ったので挑戦してみました。(乗り遅れている感もありますが・・・)
実装の備忘録的な感じで残しておこうと思います。
参考ページ
下記のページを参考にしました。というかpytorchに書き直したくらいのイメージです。
Tensorflowで実装してくれてますし、参考の論文なんかも載せてくれています。ありがとうございます。
PINNs(Physics Informed Neural Networks)とは
自然科学の現象の再現をニューラルネット(NN)にやらせる場合、2パターンあるかなと思います。
- シミュレーションデータをひたすら集めて学習させてモデルを作るデータドリブンな方法
- データと物理式の両方を考慮する方法
PINNsは後者の方法で、実測データの誤差と物理式の誤差の両方を考慮することで、物理式を成り立たせようとしながら学習してくれます。なので物理法則にのとった解を返してくれるような手法になります。
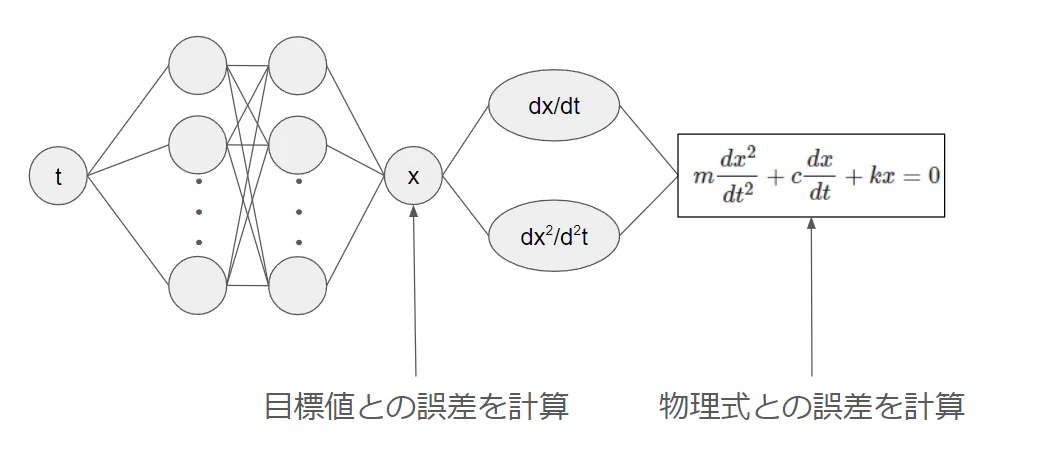
今回は、参考ページと同様の1自由度の減衰振動を対象にしていきます。概要は図のとおりです。
データドリブンなNNの部分とPhysics InformedなNNの部分に分かれます。
- データドリブン
初めのxまではデータドリブンなNNです。すべて観測値を使うので、いつものNNと変わりません。 - Physics InformedなNN
図の全体がPhysics InformedなNNです。微分を計算して物理式との誤差を得ます。
1自由度減衰振動
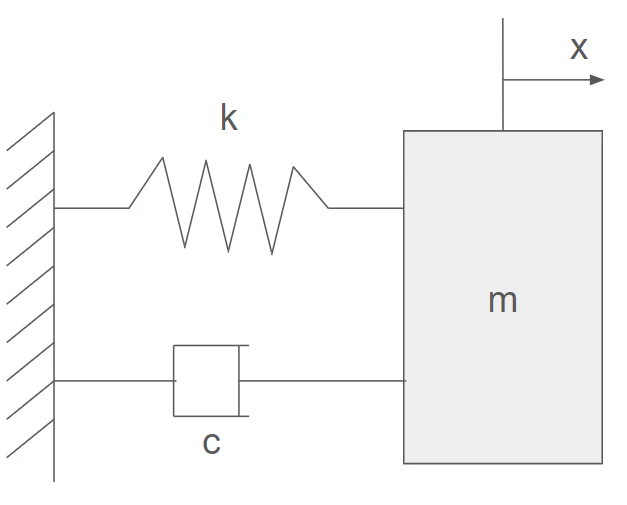
図のようバネマスダンパー系を考えます。mは質量、cは減衰係数、kはばね定数で固有の値です。今回は固定値を使っています。運動方程式は下のようになります。
m\frac{dx^2}{dt^2}+c\frac{dx}{dt}+kx=0 ・・・(1)
初期条件を
t = 0 のとき x = x_0, \frac{dx}{dt} = v_0 とすれば
一般解は
x = e^{-εt}(x_0cos(ω_dt+\frac{v_0+εx_0}{ω_d}sinω_dt))
とかけます。
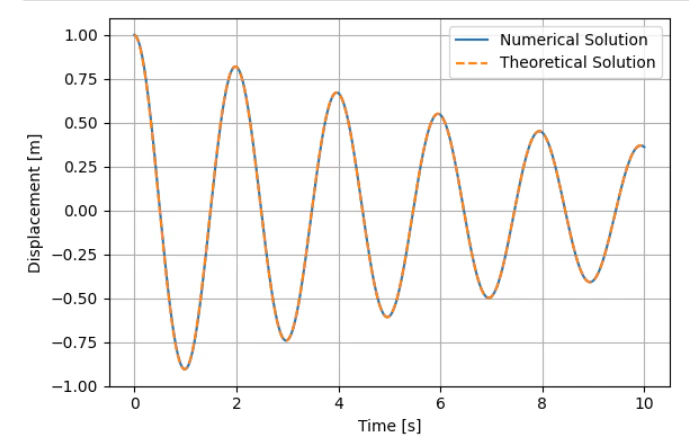
今回は、(1)の式を有限差分法で近似的に解いて、そこから数点を実測データとして使います。
有限差分法(Finite Difference Method)で解く
有限差分法で記述すると下記のようになります。
\displaylines{
x_{t+1} = x_t + \frac{dx}{dt}Δt \\
v_{t+1} = v_t + \frac{dv}{dt}Δt
}
ここまでで準備ができたので実装していこうと思います。
PINNs の実装
データの準備
有限差分法でデータを作っていきます。今回は、有限差分法で計算したデータを用います。
一般解は後々の可視化のために作っています。
def FDM(m, c, k, u0, v0, t_end, n_steps):
# 問題設定
"""
m : 質量 [kg]
c : 減衰係数 [N.s/m]
k : ばね定数 [N/m]
u0 : 初期変位 [m]
v0 : 初期速度 [m/s]
t_end : 計算時間 [s]
n_steps : ステップ数
"""
# 時間ベクトルと初期値
t = np.linspace(0, t_end, n_steps)
u_num = np.zeros_like(t)
v_num = np.zeros_like(t)
u_num[0] = u0
v_num[0] = v0
# 有限要素法
dt = t[1] - t[0]
for i in range(n_steps-1):
acc = (k*u_num[i] + c*v_num[i]) / -m # 加速度
v_num[i+1] = v_num[i] + acc*dt # 速度
u_num[i+1] = u_num[i] + v_num[i+1]*dt # 変位
# 理論解
zeta = c / (2 * np.sqrt(k*m)) # 減衰比
omega_n = np.sqrt(k/m) # 固有円振動数
omega_d = omega_n * np.sqrt(1 - zeta**2) # 減衰円振動数
C1 = u0
C2 = v0 / omega_d
u_th = np.exp(-zeta*omega_n*t) * (C1*np.cos(omega_d*t) + C2*np.sin(omega_d*t))
return t, u_num, u_th
PINNsの実装
pytorchで実装しています。自分の理解のためにもあえて明示したり、コメント書いてる部分があります。
_predがNNで止まる部分で_pinnがPINNsで計算する部分です。今回、観測値としては有限差分法で得た解からランダムに5点だけ抽出して観測値として与えています。データドリブンなNNは5点しかデータがないことになります。一方、PINNsで計算する方は、有限差分法と同じだけの時間ステップを入力として与えて計算します。
つまり、観測値が5点だけしか得られなかったがそれの何倍もの時間ステップの解が得られるということになります。
今回、ランダムに5点を選んでしまいましたが、例えば、最初の数時間ステップだけを用意してあとの数十秒はPINNsで計算させるということが可能になることもあると思います。(シミュレーションのほうが早いかPINNsのほうがはやいかというのはありますが・・・)
PINNs部分のコードは下記のとおりです。
class PhysicsInformedNNs(nn.Module):
def __init__(self, n_input, n_output, n_neuron, n_layer, epochs, act_fn='tanh'):
"""
Neural Networksの作成
"""
super(PhysicsInformedNNs, self).__init__()
self.n_input = n_input # 入力の数
self.n_output = n_output # 出力の数
self.n_neuron = n_neuron # 中間層のニューロンの数
self.n_layer = n_layer # 中間層の数
self.epochs = epochs # エポック数
self.act_fn = getattr(F, act_fn)
layers = []
layers.append(nn.Linear(n_input, n_neuron)) # 一層目を作る
layers.append(nn.Tanh() if act_fn == 'tanh' else nn.ReLU()) # ここで入力層-中間層-活性化関数 までできる
for _ in range(n_layer - 1):
"""
中間層をn_layer - 1個作る
中間層-活性化関数-中間層-活性化関数-・・・とする
"""
layers.append(nn.Linear(n_neuron, n_neuron))
layers.append(nn.Tanh() if act_fn == 'tanh' else nn.ReLU())
layers.append(nn.Linear(n_neuron, n_output)) # 出力層をくっつける
self.layers = nn.Sequential(*layers) # self.layersに層構造を格納する
def forward(self, t):
"""
入力 t を受け取って、self.layersからの結果を出力する
"""
return self.layers(t)
def train_step(self, t_data, x_data, t_pinn, c, k, optimizer, loss_fn):
"""
損失関数や学習の仕方などを定義する
t_data, t_pinn はこのファイル内では時間が入っている
"""
optimizer.zero_grad() # 勾配を0にリセットする
"""
Neural Networkの部分
"""
x_pred = self.forward(t_data) # forward関数にt_dataを入れて予測値x_predを受け取る。xは変位
loss1 = loss_fn(x_pred, x_data) # 損失関数loss_fnで損失を計算してる
"""
Physics Informedの部分
"""
x_pred_pinn = self.forward(t_pinn) # forward関数にt_pinnを入れて予測値x_pred_pinnを受け取る
dx_dt = torch.autograd.grad(x_pred_pinn.sum(), t_pinn, create_graph=True, allow_unused=True)[0] # xをtで微分する
dx_dt2 = torch.autograd.grad(dx_dt.sum(), t_pinn, create_graph=True, allow_unused=True)[0] # dx/dtをtで微分する
loss_physics = dx_dt2 + c * dx_dt + k * x_pred_pinn # 方程式の残差を計算する
loss2 = loss_fn(loss_physics, torch.zeros_like(loss_physics)) # 方程式の残差は0が望ましいので方程式の残差と0ベクトルの損失を計算する
"""
NN + PI = PINNs の部分
"""
loss = loss1 + 3.0e-4 * loss2 # NN部分の損失とPINNs部分の損失を合わせて全体の損失とする。5.0e-4はスケール合わせ
loss.backward() # 損失に対する勾配を計算する
optimizer.step() # 計算された勾配に元図いて重みを更新する
return loss, loss1, loss2, x_pred_pinn # 合計損失を返す
def train(self, t, x, t_data, x_data, t_pinn, c, k, optimizer, loss_fn, early_stopping):
#self.train()
loss_values = []
x_preds = []
for i in range(self.epochs):
loss, loss1, loss2, x_pred = self.train_step(t_data, x_data, t_pinn, c, k, optimizer, loss_fn)
loss_values.append(loss.item()) # train_stepでlossを計算して、epoch毎に保存する
x_preds.append(x_pred)
if i % 1000 == 0:
print('Loss:', loss, 'loss1:', loss1, 'loss2:', loss2)
if early_stopping(loss_values):
break
#self.eval()
return loss_values, x_preds
まとめ
今回は、簡単な問題というのもあってかなりうまくいきました。2次元にも挑戦してみたいところです。
KaggleノートブックやGoogle Colabで動かすとクラッシュしてしまいます・・・
自宅のPCで動かしていたわけではないため、結果乗せれていません。参考ページと同じような結果は得られています・・・
参考
1次元の棒の引っ張りについても書いたので追記します。(2025/9/10)
全コード
ライブラリ読み込み
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.animation as animation
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import torch.nn as nn
有限差分法
def FDM(m, c, k, u0, v0, t_end, n_steps):
# 問題設定
"""
m : 質量 [kg]
c : 減衰係数 [N.s/m]
k : ばね定数 [N/m]
u0 : 初期変位 [m]
v0 : 初期速度 [m/s]
t_end : 計算時間 [s]
n_steps : ステップ数
"""
# 時間ベクトルと初期値
t = np.linspace(0, t_end, n_steps)
u_num = np.zeros_like(t)
v_num = np.zeros_like(t)
u_num[0] = u0
v_num[0] = v0
# 有限要素法
dt = t[1] - t[0]
for i in range(n_steps-1):
acc = (k*u_num[i] + c*v_num[i]) / -m # 加速度
v_num[i+1] = v_num[i] + acc*dt # 速度
u_num[i+1] = u_num[i] + v_num[i+1]*dt # 変位
# 理論解
zeta = c / (2 * np.sqrt(k*m)) # 減衰比
omega_n = np.sqrt(k/m) # 固有円振動数
omega_d = omega_n * np.sqrt(1 - zeta**2) # 減衰円振動数
C1 = u0
C2 = v0 / omega_d
u_th = np.exp(-zeta*omega_n*t) * (C1*np.cos(omega_d*t) + C2*np.sin(omega_d*t))
return t, u_num, u_th
Early stopping
def early_Stopping(loss_values, patience=10, delta=0):
"""Early stopping to monitor the loss value
Args:
loss_values (list): The list of loss values
patience (int, optional): How many epochs to wait for improvement before stopping. Defaults to 10.
delta (float, optional): Minimum change in loss value to qualify as an improvement. Defaults to 0.
Returns:
bool: True if we should stop training, False otherwise
"""
if len(loss_values) <= patience:
return False
# Calculate the difference between current and minimum loss
minimum = np.min(loss_values[:-patience])
current = loss_values[-1]
diff = abs(current - minimum)
if diff < delta:
return True # Loss did not improve enough, stop training
else:
return False # Loss improved, continue training
PINNs
class PhysicsInformedNNs(nn.Module):
def __init__(self, n_input, n_output, n_neuron, n_layer, epochs, act_fn='tanh'):
"""
Neural Networksの作成
"""
super(PhysicsInformedNNs, self).__init__()
self.n_input = n_input # 入力の数
self.n_output = n_output # 出力の数
self.n_neuron = n_neuron # 中間層のニューロンの数
self.n_layer = n_layer # 中間層の数
self.epochs = epochs # エポック数
self.act_fn = getattr(F, act_fn)
layers = []
layers.append(nn.Linear(n_input, n_neuron)) # 一層目を作る
layers.append(nn.Tanh() if act_fn == 'tanh' else nn.ReLU()) # ここで入力層-中間層-活性化関数 までできる
for _ in range(n_layer - 1):
"""
中間層をn_layer - 1個作る
中間層-活性化関数-中間層-活性化関数-・・・とする
"""
layers.append(nn.Linear(n_neuron, n_neuron))
layers.append(nn.Tanh() if act_fn == 'tanh' else nn.ReLU())
layers.append(nn.Linear(n_neuron, n_output)) # 出力層をくっつける
self.layers = nn.Sequential(*layers) # self.layersに層構造を格納する
def forward(self, t):
"""
入力 t を受け取って、self.layersからの結果を出力する
"""
return self.layers(t)
def train_step(self, t_data, x_data, t_pinn, c, k, optimizer, loss_fn):
"""
損失関数や学習の仕方などを定義する
t_data, t_pinn はこのファイル内では時間が入っている
"""
optimizer.zero_grad() # 勾配を0にリセットする
"""
Neural Networkの部分
"""
x_pred = self.forward(t_data) # forward関数にt_dataを入れて予測値x_predを受け取る。xは変位
loss1 = loss_fn(x_pred, x_data) # 損失関数loss_fnで損失を計算してる
"""
Physics Informedの部分
"""
x_pred_pinn = self.forward(t_pinn) # forward関数にt_pinnを入れて予測値x_pred_pinnを受け取る
dx_dt = torch.autograd.grad(x_pred_pinn.sum(), t_pinn, create_graph=True, allow_unused=True)[0] # xをtで微分する
dx_dt2 = torch.autograd.grad(dx_dt.sum(), t_pinn, create_graph=True, allow_unused=True)[0] # dx/dtをtで微分する
loss_physics = dx_dt2 + c * dx_dt + k * x_pred_pinn # 方程式の残差を計算する
loss2 = loss_fn(loss_physics, torch.zeros_like(loss_physics)) # 方程式の残差は0が望ましいので方程式の残差と0ベクトルの損失を計算する
"""
NN + PI = PINNs の部分
"""
loss = loss1 + 3.0e-4 * loss2 # NN部分の損失とPINNs部分の損失を合わせて全体の損失とする。5.0e-4はスケール合わせ
loss.backward() # 損失に対する勾配を計算する
optimizer.step() # 計算された勾配に元図いて重みを更新する
return loss, loss1, loss2, x_pred_pinn # 合計損失を返す
def train(self, t, x, t_data, x_data, t_pinn, c, k, optimizer, loss_fn, early_stopping):
#self.train()
loss_values = []
x_preds = []
for i in range(self.epochs):
loss, loss1, loss2, x_pred = self.train_step(t_data, x_data, t_pinn, c, k, optimizer, loss_fn)
loss_values.append(loss.item()) # train_stepでlossを計算して、epoch毎に保存する
x_preds.append(x_pred)
if i % 1000 == 0:
print('Loss:', loss, 'loss1:', loss1, 'loss2:', loss2)
if early_stopping(loss_values):
break
#self.eval()
return loss_values, x_preds
Training
"""
手順
1. FDMで計算する
2. FDMの計算結果からランダムに5点を選び教師データとする
"""
m = 1.0
c = 0.2
k = 10.0
u0 = 1.0
v0 = 0.0
t_end = 10.0
n_steps = 1000
t, u_num, u_th = FDM(m, c, k, u0, v0, t_end, n_steps) # FEMで計算した時間刻みとFEMの解、グラフ用に一般解を出力する
select_data = [0, 55, 230, 640, 900] # 適当に5点選ぶ、この場合0 ~ 1000までの間で選ぶ
t_data = torch.from_numpy(t[select_data]).view(-1,1).to(torch.float32) # 5点抽出
x_data = torch.from_numpy(u_num[select_data]).view(-1,1).to(torch.float32) # 5点抽出
x = torch.from_numpy(u_num).view(-1,1).to(torch.float32)
t_pinn = torch.linspace(0, 10, 10000, requires_grad=True).view(-1,1).to(torch.float32)
n_input = 1
n_output = 1
n_neuron = 32
n_layer = 4
epochs = 50000
PINNs = PhysicsInformedNNs(n_input, n_output, n_neuron, n_layer, epochs)
optimizer = optim.Adam(PINNs.parameters(), lr=1e-3)
loss_fn = nn.MSELoss()
early_stopping = early_Stopping
loss_values, x_preds = PINNs.train(t, u_num, t_data, x_data, t_pinn, c, k, optimizer, loss_fn, early_stopping)
plt.plot(np.arange(0, epochs, 1), loss_values)
plt.xlabel('epochs')
plt.ylabel('Loss')
plt.plot(t_pinn.view(1, -1)[0].detach().numpy(), x_preds[-1].view(1,-1).detach().numpy()[0], label='PINNs')
plt.scatter(t_data, x_data, label='Training data')
plt.plot(t, x, label='Theoretical data')
plt.xlabel('Time')
plt.ylabel('x')
plt.legend()