pythonで点群処理できるOpen3Dの探検.
点群特徴FPFHで位置合わせして,ICPで微修正.
- 公式チュートリアルを見やすくしてみた.
- 数値がハードコードだったので,点群のサイズの1/10を基本にして,他のいろいろなパラメータを決めるようにしてみた.
- メソッド名が長いので,
import asで短く
Tips:
- ダウンサンプリングのサイズを1/10程度に粗くしないと,RANSACがうまく機能しない.(1/100ぐらい細かくしすぎるとダメ)
- FPFHのサイズは1/10 * 50にしている.大きめのほうが良さそう.(小さすぎると特徴計算に使う点の数が少なくなるから)
- 法線計算は1/10にしているが,あまり影響なし.
コード
open3d
import sys
sys.path.append("../..") # Open3D/build/lib/ へのパス
import copy
import numpy as np
import py3d
from py3d import registration_ransac_based_on_feature_matching as RANSAC
from py3d import registration_icp as ICP
from py3d import compute_fpfh_feature as FPFH
def show(model, scene, model_to_scene_trans=np.identity(4)):
model_t = copy.deepcopy(model)
scene_t = copy.deepcopy(scene)
model_t.paint_uniform_color([1, 0, 0])
scene_t.paint_uniform_color([0, 0, 1])
model_t.transform(model_to_scene_trans)
py3d.draw_geometries([model_t, scene_t])
model = py3d.read_point_cloud("bun000.ply")
scene = py3d.read_point_cloud("bun045.ply")
## PCLモデルを使うならこちら
# model = py3d.read_point_cloud("milk.pcd")
# scene = py3d.read_point_cloud("milk_cartoon_all_small_clorox.pcd")
# いろいろなサイズの元: model点群の1/10を基本サイズsizeにする
size = np.abs((model.get_max_bound() - model.get_min_bound())).max() / 10
kdt_n = py3d.KDTreeSearchParamHybrid(radius=size, max_nn=50)
kdt_f = py3d.KDTreeSearchParamHybrid(radius=size * 50, max_nn=50)
py3d.estimate_normals(model, kdt_n)
py3d.estimate_normals(scene, kdt_n)
show(model, scene)
# ダウンサンプリング
model_d = py3d.voxel_down_sample(model, size)
scene_d = py3d.voxel_down_sample(scene, size)
py3d.estimate_normals(model_d, kdt_n)
py3d.estimate_normals(scene_d, kdt_n)
show(model_d, scene_d)
# 特徴量計算
model_f = FPFH(model_d, kdt_f)
scene_f = FPFH(scene_d, kdt_f)
# 準備
checker = [py3d.CorrespondenceCheckerBasedOnEdgeLength(0.9),
py3d.CorrespondenceCheckerBasedOnDistance(size * 2)]
est_ptp = py3d.TransformationEstimationPointToPoint()
est_ptpln = py3d.TransformationEstimationPointToPlane()
criteria = py3d.RANSACConvergenceCriteria(max_iteration=40000,
max_validation=500)
# RANSACマッチング
result1 = RANSAC(model_d, scene_d,
model_f, scene_f,
max_correspondence_distance=size * 2,
estimation_method=est_ptp,
ransac_n=4,
checkers=checker,
criteria=criteria)
show(model_d, scene_d, result1.transformation)
# ICPで微修正
result2 = ICP(model, scene, size, result1.transformation, est_ptpln)
show(model, scene, result2.transformation)
結果
以下の結果はサイズが1/30のときのもの.(1/10にするともっと粗くなる)
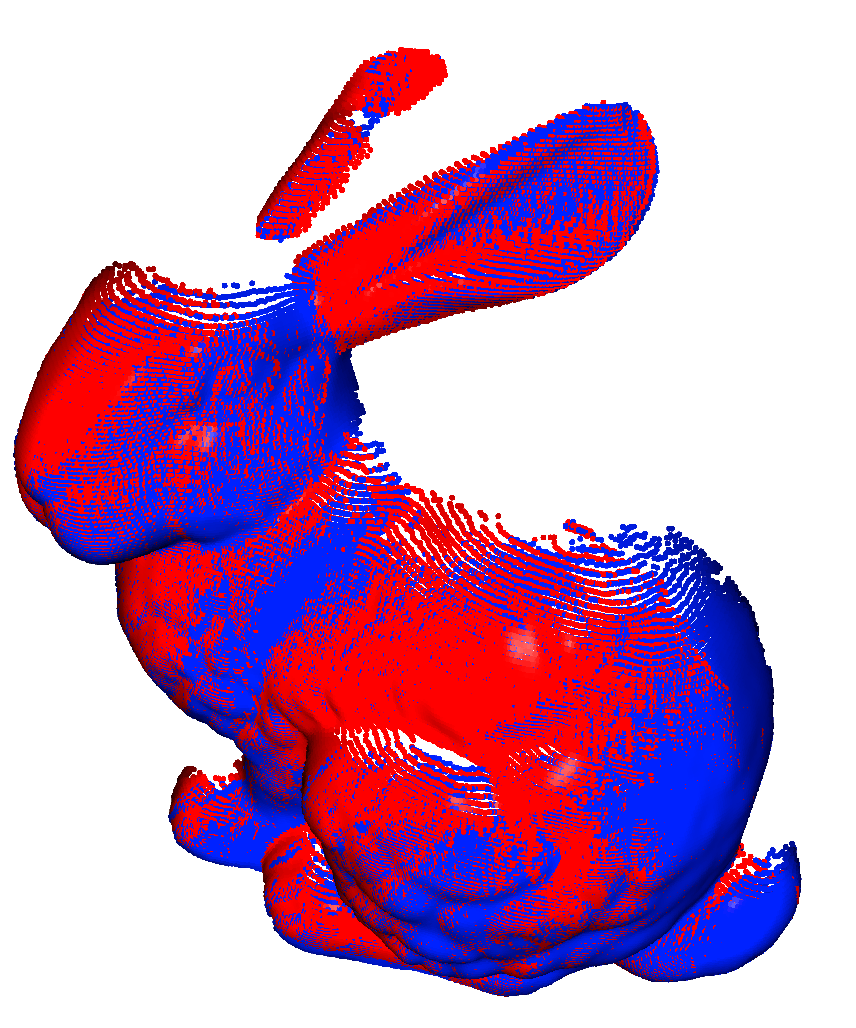
bunny
元の点群
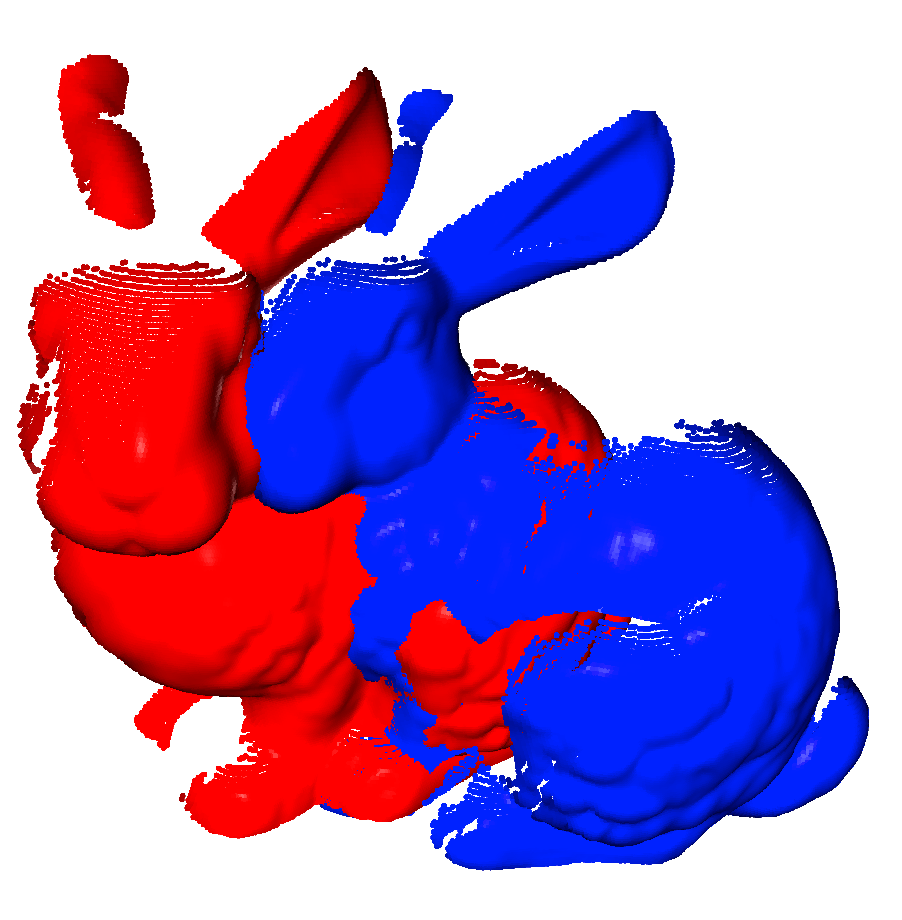
ダウンサンプリング後
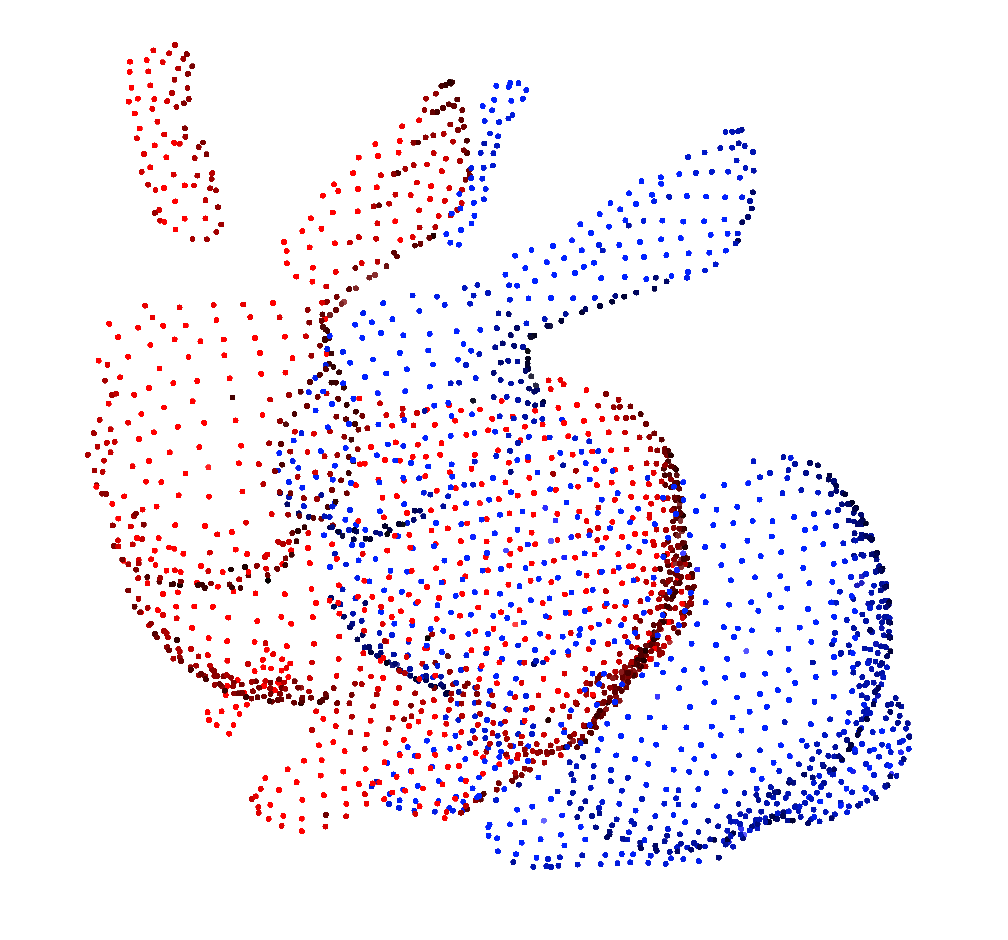
RANSACマッチング後
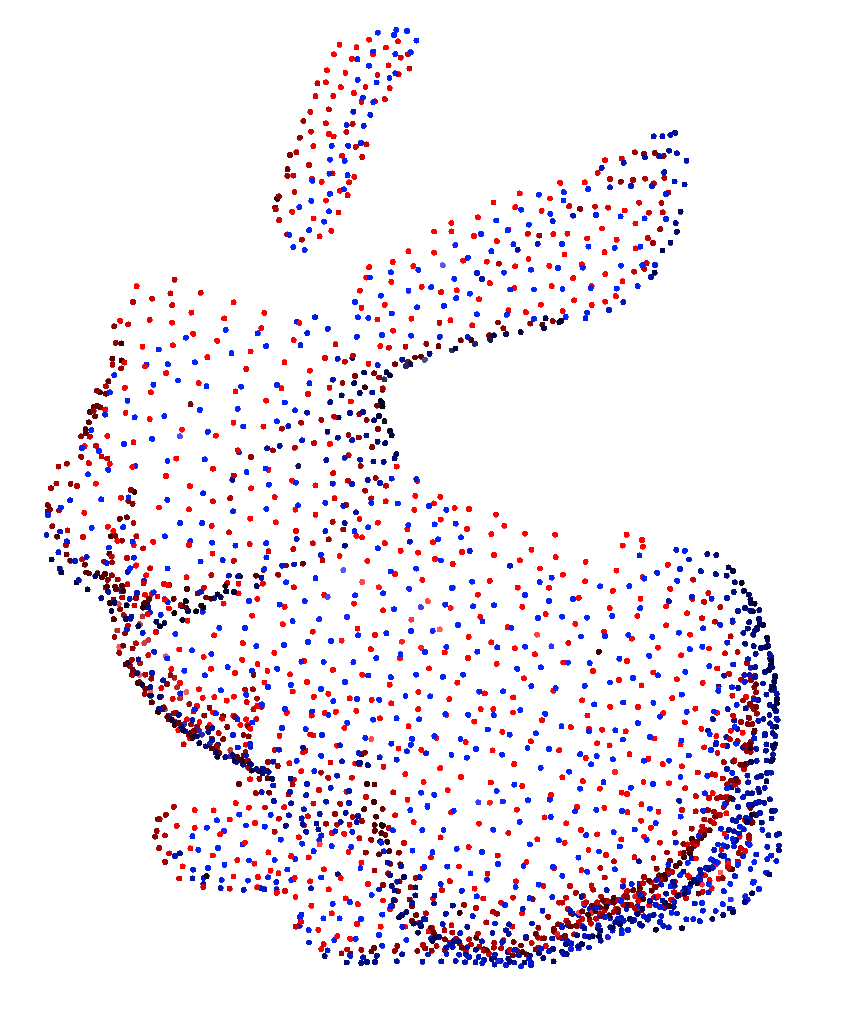
ICP後
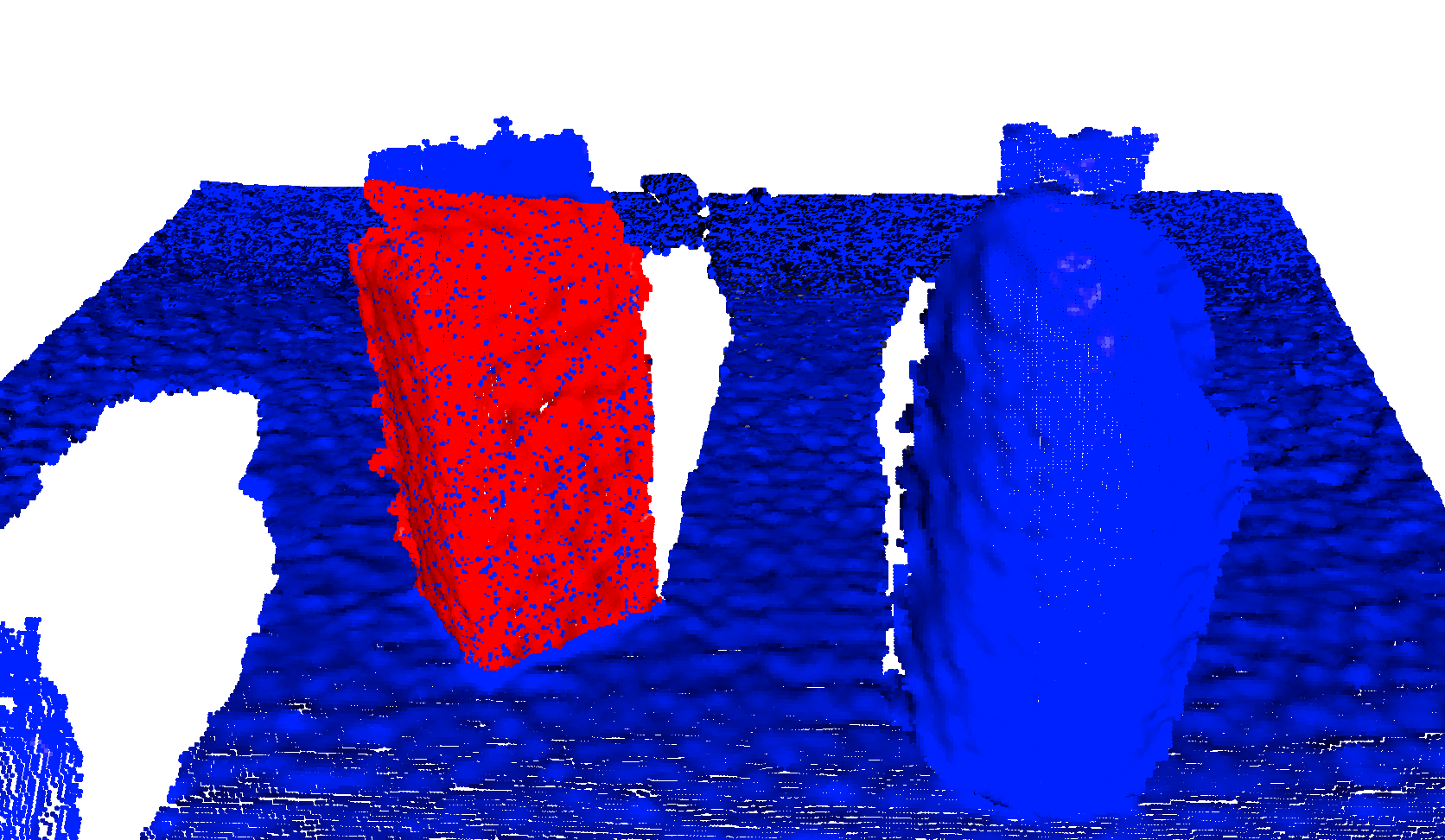
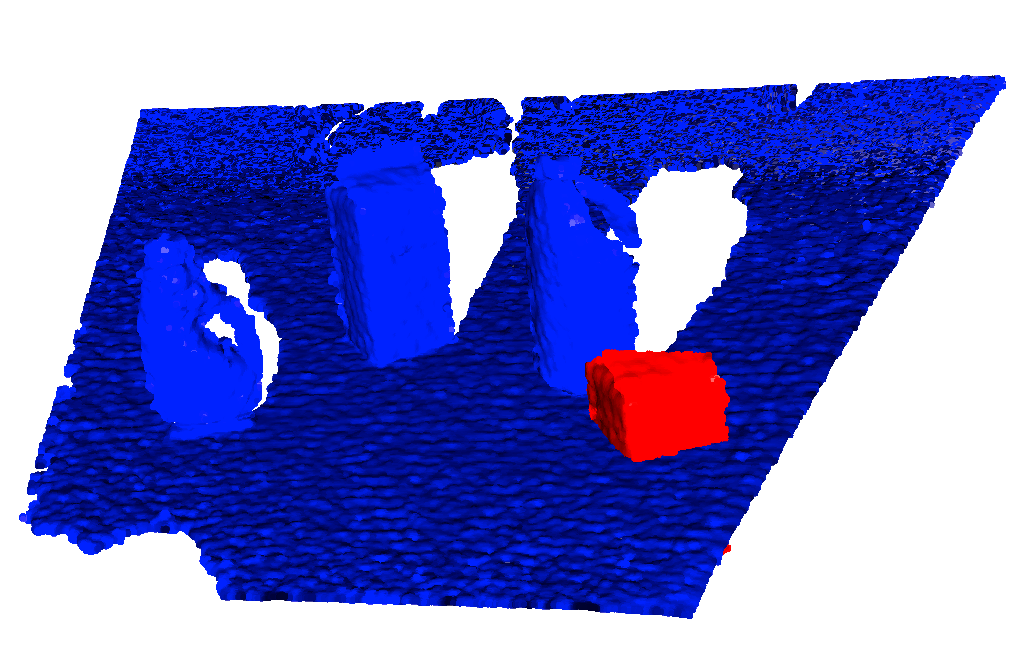
PCLのデーブル・ミルクデータ
元の点群
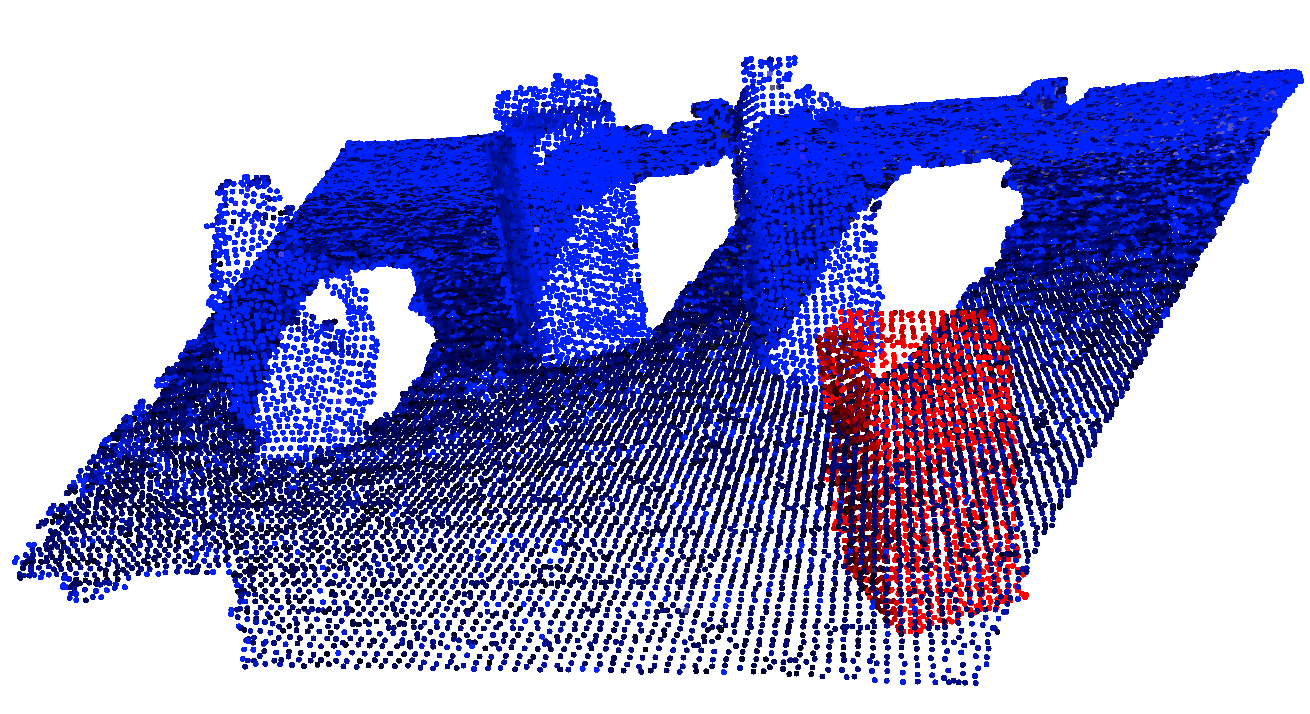
ダウンサンプリング後
RANSACマッチング後
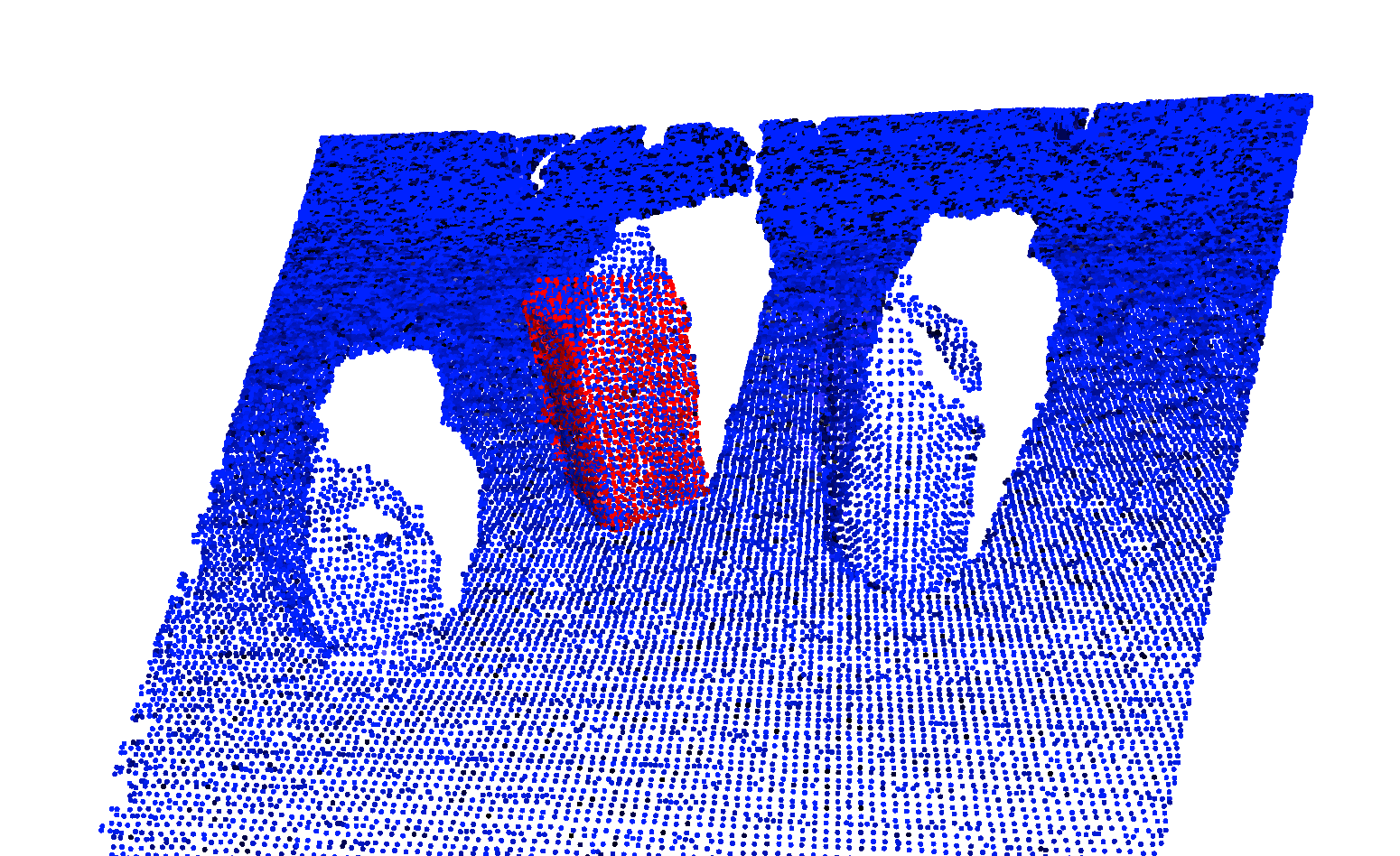
ICP後