概要
- データの発生源に近い場所でデータを処理する「エッジAIコンピューティング」が注目されている
- まず、エッジAIのおおまかな概念を理解し、実際にエッジAI端末を購入して使ってみる
- 静止画像解析、次に動画解析と進めていく予定であったが、難易度が高いため今回は動体検知のデモの動作を確認する
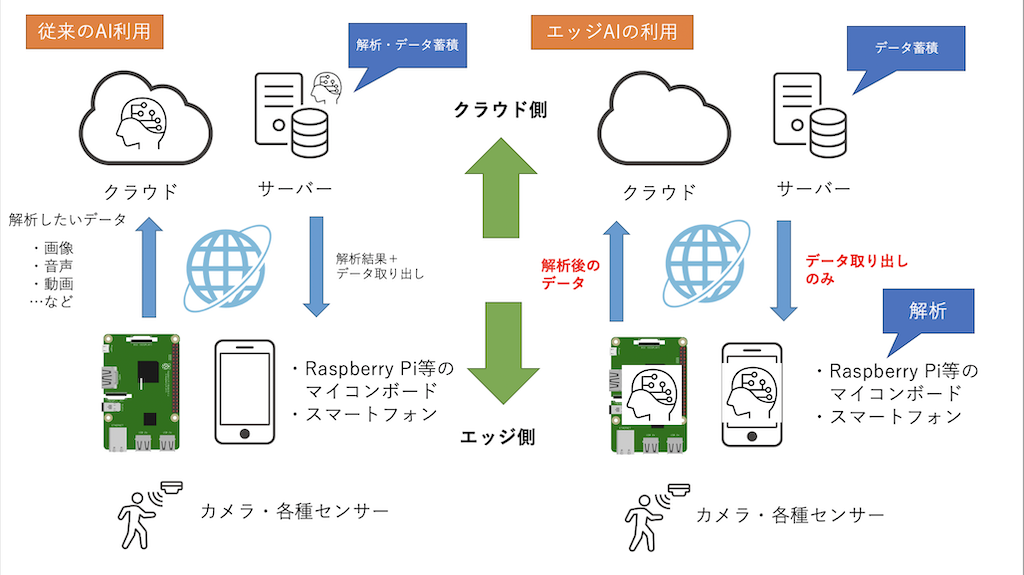
エッジAIとは何か
- 通常AI利用する場合は、センサーから収集された各種データはマイコンボードやスマホ、ネットワークを経由し
、クラウド上や従来型のサーバーで解析処理を行う - エッジAIを利用すると、センサーから収集された各種データはマイコンボードやスマホ内で解析される

用意するもの
- Jetson Nano開発者キット 2GB
- RaspberryPi4 対応 電源セット(5V 3.0A) ←Jetson Nanoにも使えます
- RaspberryPi4純正カメラ、またはUSBカメラ
- microSDカード(32GB以上推奨)
- USB接続のマウス・キーボード
- HDMI接続のディスプレイ(4K推奨)
デモ実行
VisionWorksという、カメラ等で撮影した映像をAIでリアルタイム解析し
情報を付加するデモです。
デモ環境のセットアップ
ホームディレクトリ ~/ にデモ環境をインストールする
# /usr/share/visionworks/sources/install-samples.sh ~/
ソースコードの状態なので、そのままでは実行できません。 make コマンドでコンパイルします。
# make -j4 # add dbg=1 to make debug build
makeコマンドのオプション解説
- -j4 makeコマンドをマルチプロセッサ環境で高速化する
※この場合はジョブ数が4となります
※ #以降は、コメントです
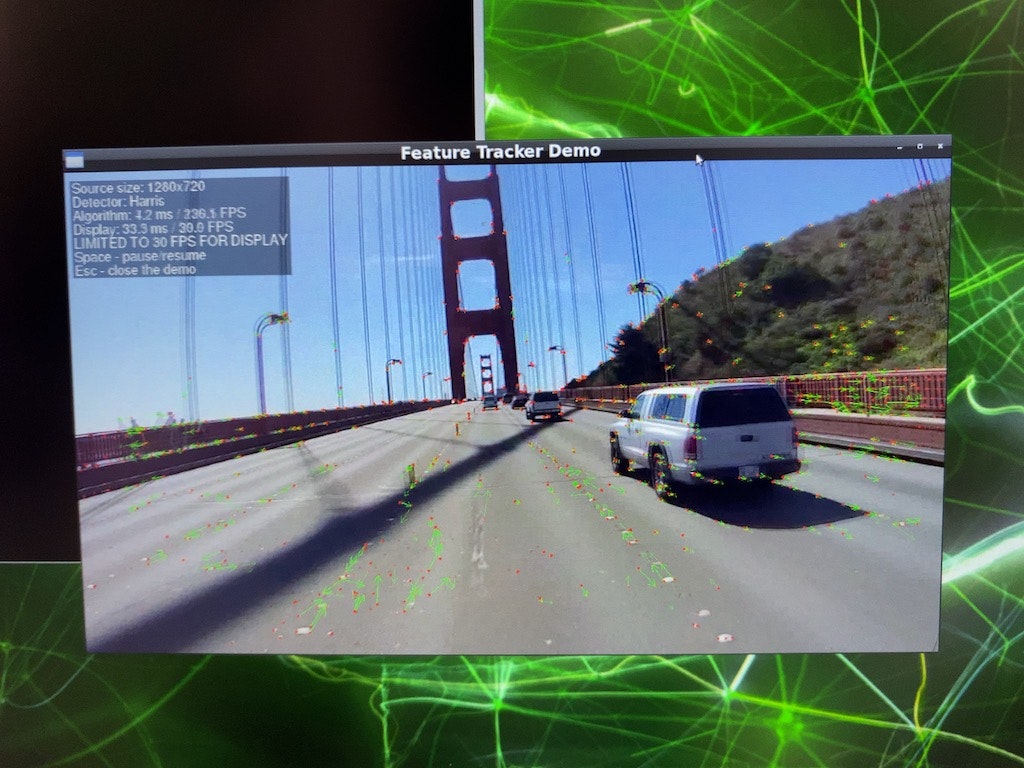
動体検知のデモが動作している様子
実行ファイルのあるディレクトリに移動する
# cd bin/aarch64/linux/release/
デモを実行する
赤点は道路やセンターライン、車、橋の柵を検出しているのが分かります
緑色の矢印は、それが移動している方向や速さを示しています。
# ./nvx_demo_feature_tracker
動体検知のデモが動作している様子
動体検知のデモが動作している様子
次回に向けて
- 自分で撮影した動画ファイルを使ってみる、できればUSBカメラを使った検出にもチャレンジしてみる
- OSの起動時にエラーが出るので、次回までには解決したい