はじめに
これまで,オドメトリとGPSでロボットの自己位置推定を行ってきましたが,屋内環境で長距離を走行する場合に限界を感じました.そこで今回はSLAMに挑戦してみました.
動作環境
環境は以下の通りです.
| 項目 | バージョン |
|---|---|
| ubuntu | 22.04 |
| ROS | ROS2 humble |
| Lidar | RPLidar A1 M8 |
↓RPLidar A1 M8

cartograpaherのインストール
下記のコマンドでcartograpaherをgithubからインストールします.
cd ~/ros2_ws/src
sudo apt install ros-humble-cartographer
sudo apt install ros-humble-cartographer-rviz
Lidarの環境構築
RPLidarA1の起動できるように,環境構築を行います.下記のサイトが参考になります.
launchファイルの作成
cartographerを起動するためのlaunchファイルを作成します.
cd ~/ros2_ws/src/sllidar_ros2/launch
touch rplidar_cartographer.launch.py
launchファイルで起動するノードを指定します.ここでは,可視化用のrvizとcartographerを起動させます.
import launch
import launch.actions
import launch.substitutions
import launch_ros.actions
from launch import LaunchDescription
from launch_ros.actions import Node
from launch.substitutions import LaunchConfiguration
from ament_index_python.packages import get_package_share_directory
from launch.actions import DeclareLaunchArgument
import os
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time', default='false')
share_dir = get_package_share_directory('sllidar_ros2')
rviz_config_file = os.path.join(
get_package_share_directory('sllidar_ros2'),
'rviz',
'cartographer.rviz')
cartographer_config_dir = LaunchConfiguration('cartographer_config_dir',
default=os.path.join(share_dir, 'config'))
configuration_basename = LaunchConfiguration('configuration_basename', default='rplidar_cartographer.lua')
resolution = LaunchConfiguration('resolution', default='0.05')
publish_period_sec = LaunchConfiguration('publish_period_sec', default='1.0')
return LaunchDescription([
Node(package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_file],
),
Node(
package='tf2_ros',
executable='static_transform_publisher',
output='screen',
arguments=['0.0', '0.0', '0.0', '0.0', '0.0', '0.0', 'base_link', 'laser_frame']
),
Node(
package='cartographer_ros',
executable='cartographer_occupancy_grid_node',
name='cartographer_occupancy_grid_node',
output='screen',
parameters=[{'resolution': 0.05}],
),
Node(
package='cartographer_ros',
executable='cartographer_node',
name='cartographer_node',
output='screen',
parameters=[{'use_sim_time': False}],
arguments=['-configuration_directory', cartographer_config_dir, '-configuration_basename', configuration_basename],
),
])
static_transform_publisher:静的な変換を公開するノードで,base_linkとlaser_frameフレーム間の位置関係を設定します.「laser_frame」は, lidar側で設定したframe_idに対応する名前を適宜設定してください.
Node(
package='tf2_ros',
executable='static_transform_publisher',
output='screen',
arguments=['0.0', '0.0', '0.0', '0.0', '0.0', '0.0', 'base_link', 'laser_frame']
),
cartographer_occupancy_grid_node:Occupancy Grid(占有格子)マップを生成するためのノードで,指定した解像度で地図を作成します.
Node(
package='cartographer_ros',
executable='cartographer_occupancy_grid_node',
name='cartographer_occupancy_grid_node',
output='screen',
parameters=[{'resolution': 0.05}],
),
cartographer_node:地図の構築およびロボットの自己位置推定を実行します.
Node(
package='cartographer_ros',
executable='cartographer_node',
name='cartographer_node',
output='screen',
parameters=[{'use_sim_time': False}],
arguments=['-configuration_directory', cartographer_config_dir, '-configuration_basename', configuration_basename],
),
luaファイルの作成
次にCartographerの設定を記述するluaファイルを作成します.
説明はコメントアウトで乗せておきます.パラメータは環境に応じて変更してください.
-- "map_builder.lua"と"trajectory_builder.lua"の設定ファイルをインクルードする
include "map_builder.lua"
include "trajectory_builder.lua"
-- オプション設定の開始
options = {
map_builder = MAP_BUILDER, -- 地図生成の設定オブジェクト
trajectory_builder = TRAJECTORY_BUILDER, -- 軌跡生成の設定オブジェクト
map_frame = "map", -- 地図の基準フレームの名前
tracking_frame = "base_link", -- ロボットの位置を追跡するためのフレーム
published_frame = "base_link", -- 発行するフレームの名前
odom_frame = "odom", -- オドメトリの基準フレームの名前
provide_odom_frame = false, -- 自動的にオドメトリフレームを生成するかどうか
publish_frame_projected_to_2d = false, -- 発行フレームを2次元に投影するか
use_odometry = false, -- オドメトリデータを使用するか
use_nav_sat = false, -- GPSデータを使用するか
use_landmarks = false, -- ランドマークデータを使用するか
num_laser_scans = 1, -- 使用するレーザースキャンの数
num_multi_echo_laser_scans = 0, -- マルチエコーレーザースキャンの数
num_subdivisions_per_laser_scan = 1, -- レーザースキャンごとに分割する数
num_point_clouds = 0, -- 使用するポイントクラウドの数
lookup_transform_timeout_sec = 0.2, -- トランスフォームのタイムアウト時間(秒)
submap_publish_period_sec = 0.05, -- サブマップの発行周期(秒)
pose_publish_period_sec = 5e-3, -- ポーズの発行周期(秒)
trajectory_publish_period_sec = 30e-3, -- 軌跡の発行周期(秒)
rangefinder_sampling_ratio = 1., -- 距離センサーのサンプリング割合
odometry_sampling_ratio = 1., -- オドメトリのサンプリング割合
fixed_frame_pose_sampling_ratio = 1., -- 固定フレームのポーズのサンプリング割合
imu_sampling_ratio = 1., -- IMUのサンプリング割合
landmarks_sampling_ratio = 1., -- ランドマークのサンプリング割合
}
-- 2次元の軌跡生成を使用する設定
MAP_BUILDER.use_trajectory_builder_2d = true
-- 2D軌跡生成の設定
TRAJECTORY_BUILDER_2D.min_range = 0. -- 距離測定の最小範囲(メートル)
TRAJECTORY_BUILDER_2D.max_range = 10. -- 距離測定の最大範囲(メートル)
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 5. -- 欠損データの代わりに使用する距離(メートル)
TRAJECTORY_BUILDER_2D.use_imu_data = false -- IMUデータを使用するか
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = false -- オンラインスキャンマッチングを使用するか
-- POSE_GRAPHの制約ビルダーのスコア設定
POSE_GRAPH.constraint_builder.min_score = 0.65 -- スキャンマッチングの最小スコア
POSE_GRAPH.constraint_builder.global_localization_min_score = 0.7 -- グローバル位置推定の最小スコア
-- POSE_GRAPHの最適化問題の重み設定
POSE_GRAPH.optimization_problem.local_slam_pose_translation_weight = 1e5 -- ローカルSLAMの平行移動に対する重み
POSE_GRAPH.optimization_problem.local_slam_pose_rotation_weight = 1e5 -- ローカルSLAMの回転に対する重み
POSE_GRAPH.optimization_problem.odometry_translation_weight = 1e5 -- オドメトリの平行移動に対する重み
POSE_GRAPH.optimization_problem.odometry_rotation_weight = 1e5 -- オドメトリの回転に対する重み
POSE_GRAPH.optimization_problem.huber_scale = 1e3 -- Huber損失関数のスケール
-- スキャンマッチングの重み設定
TRAJECTORY_BUILDER_2D.ceres_scan_matcher.occupied_space_weight = 10 -- 占有空間に対する重み
TRAJECTORY_BUILDER_2D.ceres_scan_matcher.rotation_weight = 40 -- 回転に対する重み
-- サブマップとモーションフィルターの設定
TRAJECTORY_BUILDER_2D.submaps.num_range_data = 120 -- サブマップあたりの距離データの数
TRAJECTORY_BUILDER_2D.motion_filter.max_distance_meters = 0.1 -- 最大距離のフィルタ(メートル)
TRAJECTORY_BUILDER_2D.motion_filter.max_angle_radians = math.rad(0.2) -- 最大角度のフィルタ(ラジアン)
-- 最終的なオプション設定を返す
return options
Rvizの設定ファイルを作成
rvizのファイルを作成します.
cd ~/ros2_ws/sllidar_ros2/rviz
touch cartographer.rviz
SLAMを可視化するためのRvizを設定します.
Panels:
- Class: rviz_common/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
- /Grid1
- /LaserScan1
- /LaserScan1/Topic1
- /TF1
Splitter Ratio: 0.5
Tree Height: 787
- Class: rviz_common/Selection
Name: Selection
- Class: rviz_common/Tool Properties
Expanded:
- /2D Goal Pose1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.5886790156364441
- Class: rviz_common/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz_default_plugins/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.029999999329447746
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: <Fixed Frame>
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 0
Min Value: 0
Value: true
Axis: Z
Channel Name: intensity
Class: rviz_default_plugins/LaserScan
Color: 255; 255; 255
Color Transformer: Intensity
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 47
Min Color: 0; 0; 0
Min Intensity: 47
Name: LaserScan
Position Transformer: XYZ
Selectable: true
Size (Pixels): 3
Size (m): 0.05000000074505806
Style: Flat Squares
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: System Default
Value: /scan
Use Fixed Frame: true
Use rainbow: true
Value: true
- Class: rviz_default_plugins/Marker
Enabled: false
Name: Marker
Namespaces:
{}
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /filtered_point_marker
Value: false
- Class: rviz_default_plugins/TF
Enabled: true
Frame Timeout: 15
Frames:
All Enabled: true
base_link:
Value: true
laser_frame:
Value: true
map:
Value: true
Marker Scale: 1
Name: TF
Show Arrows: true
Show Axes: true
Show Names: true
Tree:
map:
base_link:
laser_frame:
{}
Update Interval: 0
Value: true
- Alpha: 0.699999988079071
Class: rviz_default_plugins/Map
Color Scheme: map
Draw Behind: false
Enabled: true
Name: Map
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /map
Update Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /map_updates
Use Timestamp: false
Value: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Fixed Frame: map
Frame Rate: 30
Name: root
Tools:
- Class: rviz_default_plugins/Interact
Hide Inactive Objects: true
- Class: rviz_default_plugins/MoveCamera
- Class: rviz_default_plugins/Select
- Class: rviz_default_plugins/FocusCamera
- Class: rviz_default_plugins/Measure
Line color: 128; 128; 0
- Class: rviz_default_plugins/SetInitialPose
Covariance x: 0.25
Covariance y: 0.25
Covariance yaw: 0.06853891909122467
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /initialpose
- Class: rviz_default_plugins/SetGoal
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /goal_pose
- Class: rviz_default_plugins/PublishPoint
Single click: true
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /clicked_point
Transformation:
Current:
Class: rviz_default_plugins/TF
Value: true
Views:
Current:
Class: rviz_default_plugins/Orbit
Distance: 13.607483863830566
Enable Stereo Rendering:
Stereo Eye Separation: 0.05999999865889549
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X: 0
Y: 0
Z: 0
Focal Shape Fixed Size: true
Focal Shape Size: 0.05000000074505806
Invert Z Axis: false
Name: Current View
Near Clip Distance: 0.009999999776482582
Pitch: 0.9847959280014038
Target Frame: <Fixed Frame>
Value: Orbit (rviz)
Yaw: 3.175386905670166
Saved:
- Class: rviz_default_plugins/Orbit
Distance: 12.960694313049316
Enable Stereo Rendering:
Stereo Eye Separation: 0.05999999865889549
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X: 0
Y: 0
Z: 0
Focal Shape Fixed Size: true
Focal Shape Size: 0.05000000074505806
Invert Z Axis: false
Name: Orbit
Near Clip Distance: 0.009999999776482582
Pitch: 1.5697963237762451
Target Frame: <Fixed Frame>
Value: Orbit (rviz)
Yaw: 1.2103947401046753
Window Geometry:
Displays:
collapsed: false
Height: 1016
Hide Left Dock: false
Hide Right Dock: false
QMainWindow State: 000000ff00000000fd0000000400000000000001c40000039efc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000003d0000039e000000c900fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f0000039efc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073010000003d0000039e000000a400fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000004420000003efc0100000002fb0000000800540069006d00650100000000000004420000000000000000fb0000000800540069006d006501000000000000045000000000000000000000045b0000039e00000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 1850
X: 70
Y: 27
地図を作成
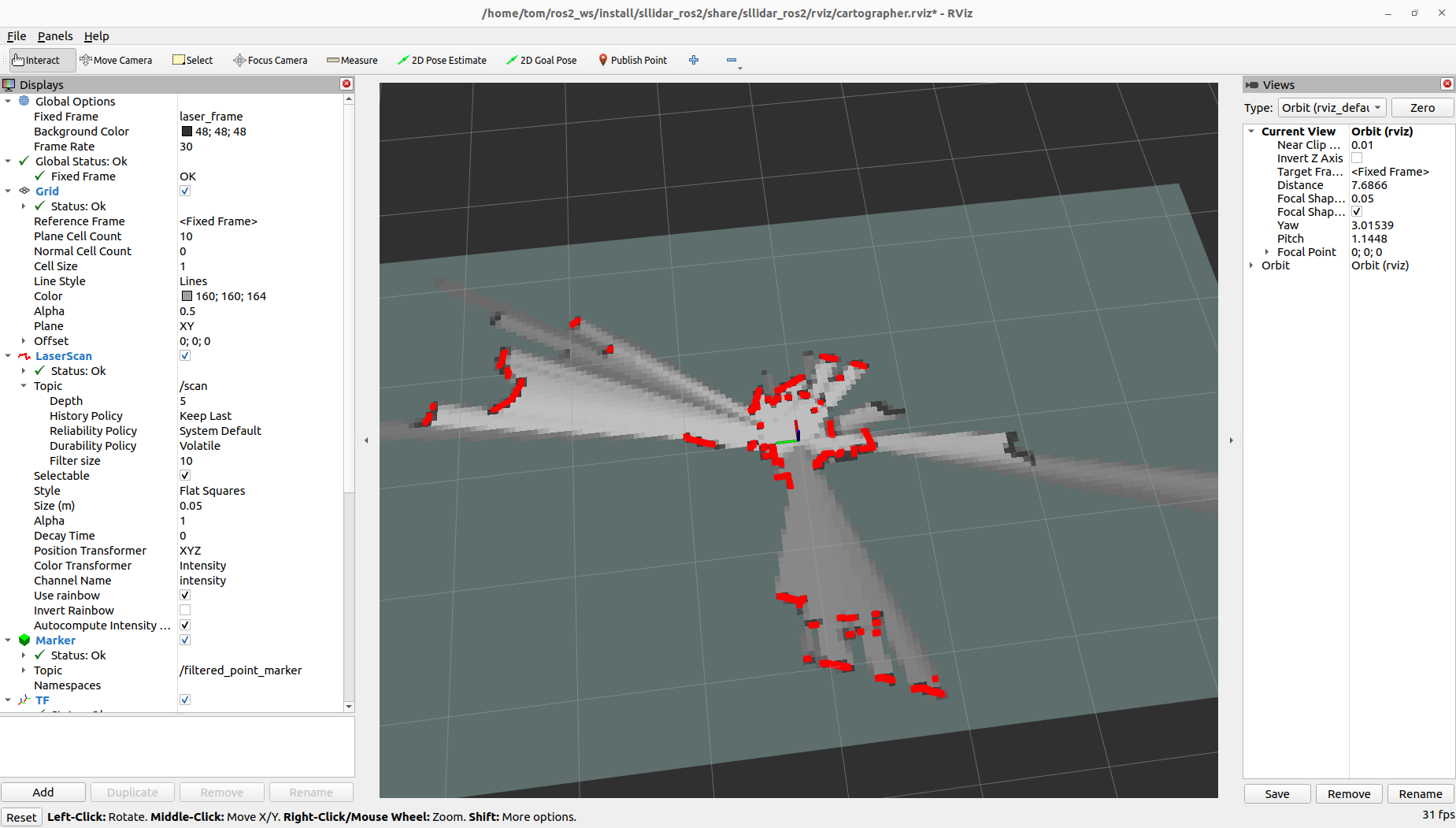
Cartographerを使用してLiDARのデータをリアルタイムで地図に変換し,環境のマッピングを行います.以下のコマンドでLiDARとCartographerを順に起動して,ROS 2でリアルタイムに地図を生成することが可能です.
Lidarを起動
LiDARデバイスを起動します.これにより,LiDARセンサーのデータが取得され,周囲の物体を検出できるようになります.
source ~/ros2_ws/install/setup.bash
ros2 launch sllidar_ros2 view_sllidar_a1_launch.py
Cartographerを起動
続いて,Cartographerを起動して,LiDARデータをもとに地図を構築します.Cartographerは,センサーのスキャンデータを解析し,2Dマッピングを行います.
source ~/ros2_ws/install/setup.bash
ros2 launch sllidar_ros2 rplidar_cartographer.launch.py
mapを保存
下記のコマンドで,作成した地図を保存できます.
ros2 run nav2_map_server map_saver_cli -f ~/map
これで地図の作成が完了しました.CartographerがLiDARからのデータを収集し,実際の環境の2Dマップがリアルタイムで生成されているのが確認できます.この地図を使用することで,ロボットの自己位置推定や経路計画に活用できます.
参考文献
謝辞
この取り組みは, GxP(グロースエクスパートナーズ)株式会社様のサポートを受けて実施しています. 貴重なアドバイスや, ロボットに必要な機材の支援をいただきました. 心より感謝申し上げます.