rosbridge
Reference
overview
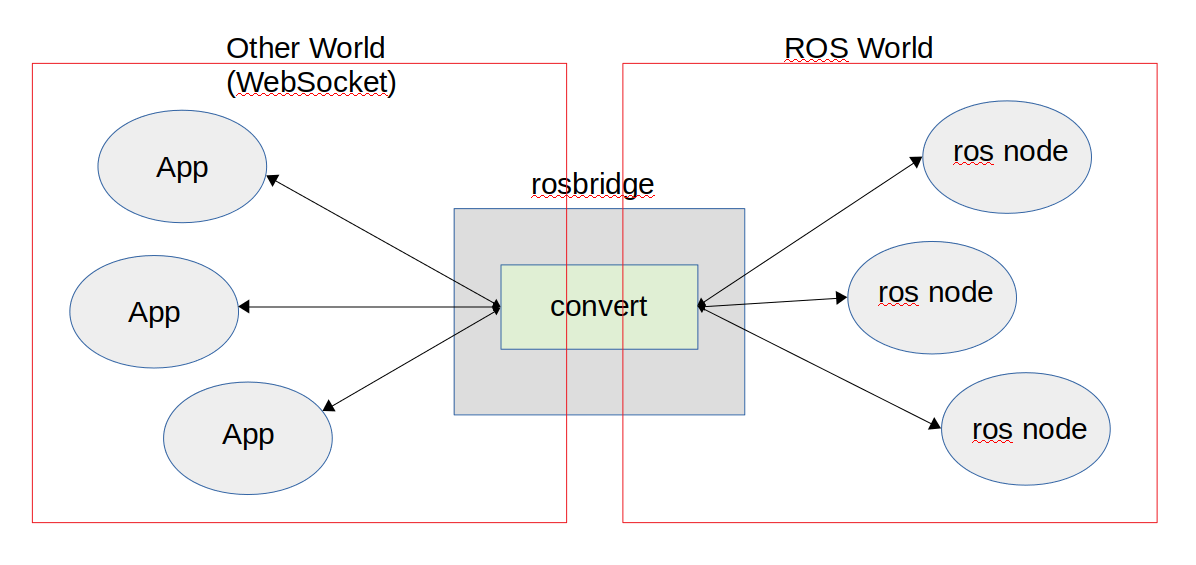
rosbridge is to connect ROS world to other world such as websocket, so that application in Non-ROS world can communicate ROS world.
message protocol
rosbridge is constructed with major two parts, one is protocol and the other is implementation to convert.
rosbridge uses json format protocol to interact with,
{
"op": "subscribe",
"topic": "/cmd_vel",
"type": "geometry_msgs/Twist"
}
Examples
unfortunately mainline does not have good example but there is one as following.
Note
- rosbridge is really simple design and does not do much things, but good enough to bridge ROS world to the other side.