この記事は**M5Stackアドベントカレンダー2021(https://qiita.com/advent-calendar/2021/m5stack)**の24日目の記事です。
こんばんは。ThousanDIYこと@tomorrow56です。
作ったもの
今まで、M5Stack用の拡張基板ばかり作っていて、あまり動くものを作っていなかったのですが、ツイッターでスタックチャンを見たことで、気がついたらサーボを使ったロボットを作っていました。

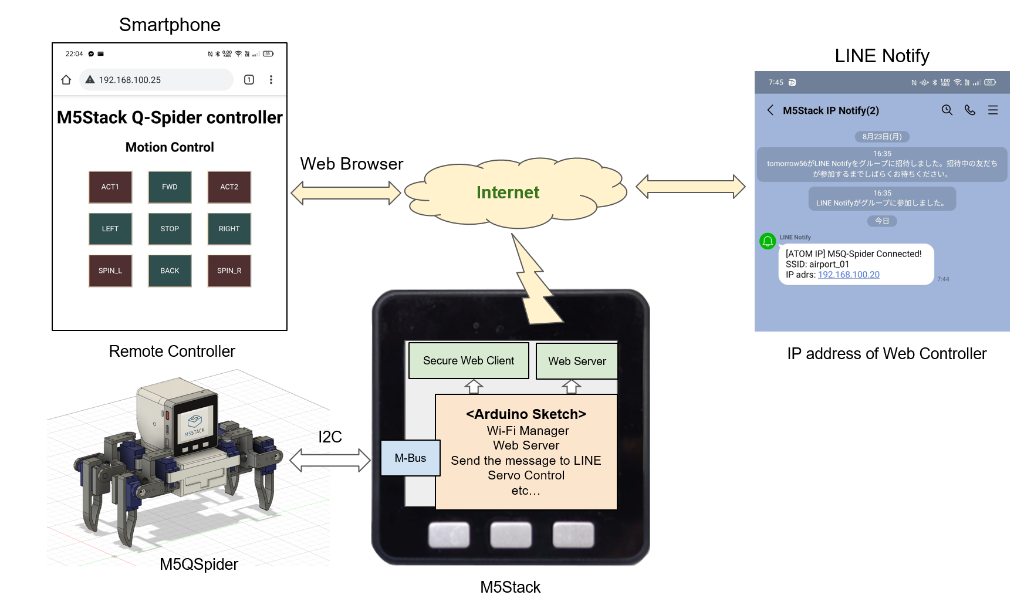
システム構成
M5Stackをhttpサーバーとしコントローラを作成、同じネットワーク内のルータ経由でアクセスできるようにしています。
割り振られたIPアドレスはLine Notifyで通知て簡単にアクセスできるようにしました。
構成は以下のようになっています。
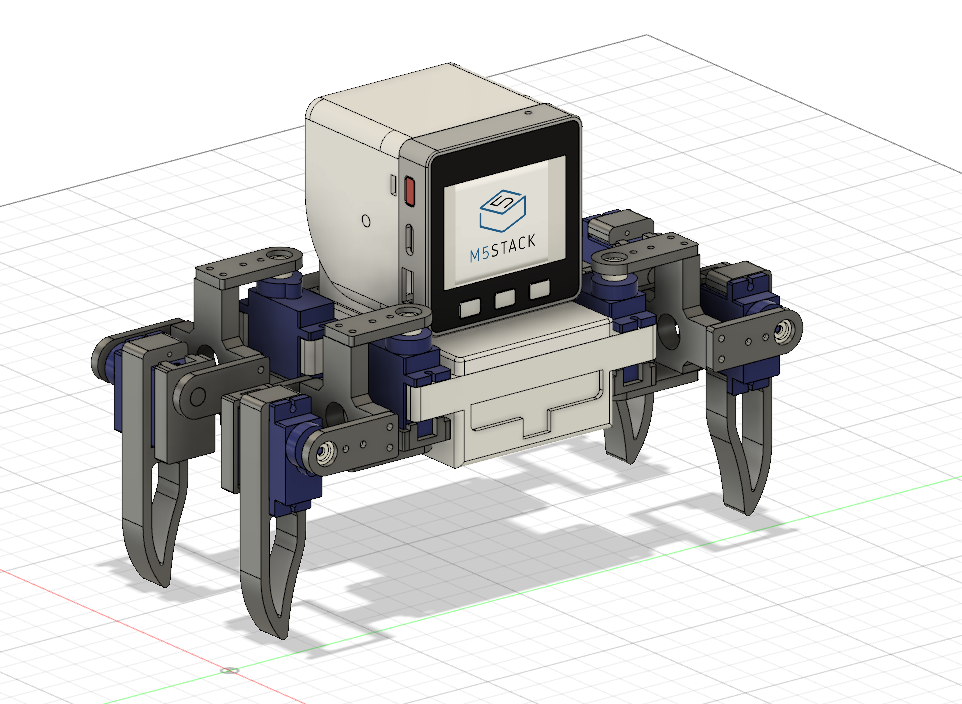
ボディの設計
ボディの構成はシンプルに、3Dプリンタで出力しやすい構造で部品を設計しました。 TOYサーボ(SG-90)を使用することでコストを抑える設計としています。特に足の部分はできるだけサポートを使わずコンパクトに、他にも流用できるような形にしています。ケーブル類の外部への露出は最小限になるようにして、できる限りボディの内側で結線が完結するように設計しました。
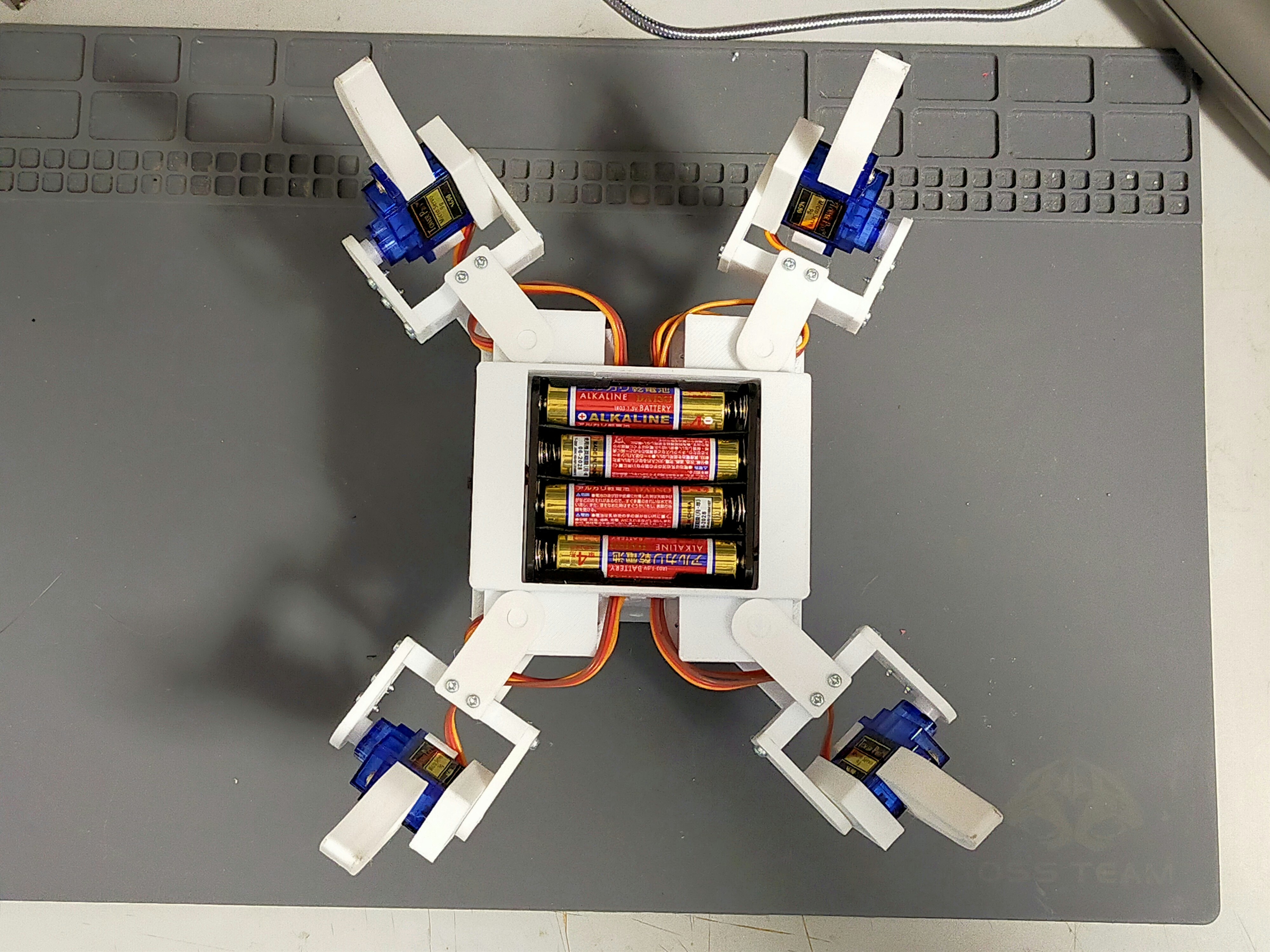
サーボの電源
サーボは合計9個です。M5Stackのポートでは足りないので、以下の基板を使用しました。
Servo Driver Shield for M5Stack
M5Stack用の電源としてカメラ用のLipoバッテリーを本体部分に内蔵しています。
サーボの電源はこれとは別に単4型乾電池4本で電池ボックスを本体の底面につけていますので交換も簡単です。
実際の動作の様子
あまりトルクの高くないSG-90ですが結構キビキビ動きます。
最終的に前後左右の動きと回転のアクションを作成しました。重心移動と足の制御で苦戦しましたが、何とか動きましたので、以下のリンクをぜひ見てください。(とアピール)
M5Stack QSpider
設計データはフリーで公開中
3DプリントのためのSTLデータとArduinoのスケッチはGithubで公開していますので、自由にアレンジしてください。
Quadruped Spider Robot for M5Stack
やっぱり動くものを考えるのは楽しいですね。それでは、メリークリスマス!