概要
ロケットやラジコンヘリにGPSをつけて飛ばした時、飛行物体のGPSの情報からデータを作成する時などに使える。
GPSの緯度経度、高度の情報から距離、方位角、仰角を算出する方法。
pythonのpyprojライブラリを使用すると便利なので、その利用法。
事前準備
pyprojのインストール
pip install pyproj
または
1.pyprojのページからソースをダウンロード
2.python setup.py build を実行
3.python setup.py install を実行
目的
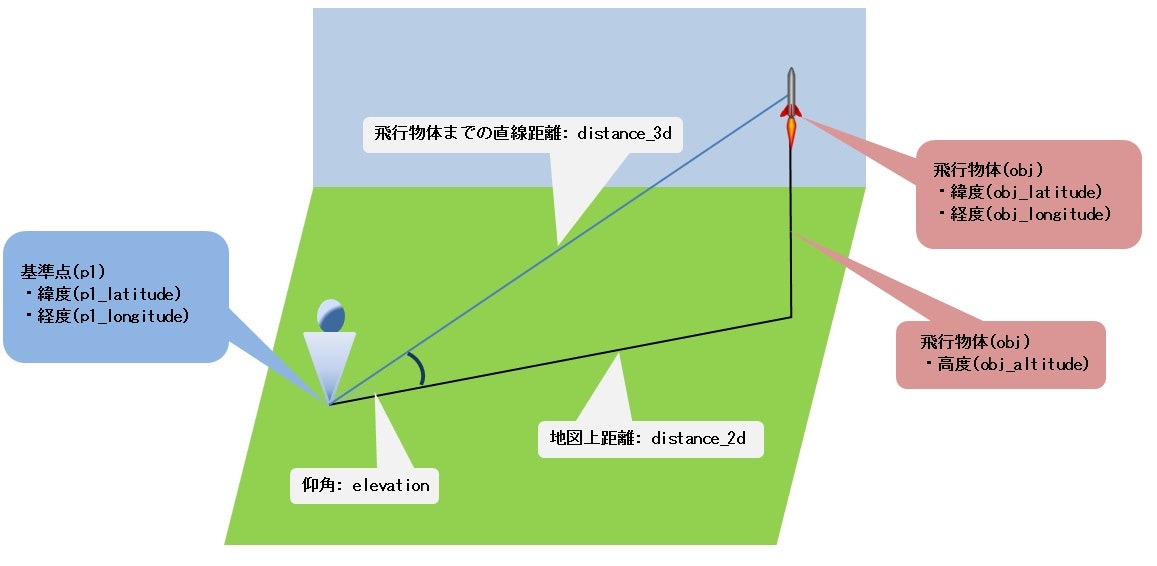
基準点をp1、飛んでいる対象をobjとする。
pyprojパッケージのGeodクラスのinv()メソッドでp1, objの緯度経度から距離と方位角を求める。
距離は地図上の距離と基準点から物体までの直線距離を求める。
さらにobjの高度も含めてmath.atan2()を使って仰角(見上げた時の角度)を求める。

ソース
geod_sample.py
# !/usr/bin/env python
# -*- coding: utf-8 -*-
import math
from pyproj import Geod
# 基準点(p1)となる緯度(p1_latitude)、経度(p1_longitude)
# 単位はDegree
p1_latitude = 35.3524
p1_longitude = 135.0302
# 飛行物体は緯度(obj_latitude)、経度(obj_longitude)、高度(obj_altitude)のところにある
obj_latitude = 35.3532
obj_longitude = 135.0305
obj_altitude = 1000 # 単位は(m)
# ellpsは赤道半径。GPSはWGS84を使っている。距離は6,378,137m
g = Geod(ellps='WGS84')
# inv() method
# 引数は inv(p1の経度, p1の緯度, 対象の経度, 対象の緯度, radians=False)
# radiansで出力が変わる。無し、またはFalseでDegree、Trueを入れればRadianで出力される
# 戻り値は方位角(azimuth)、反方位角(back_azimuth)、距離(distance_2d)の順番
azimuth, back_azimuth, distance_2d = g.inv(p1_longitude, p1_latitude, obj_longitude, obj_latitude)
# 必要なものだけ欲しいなら以下でも可
result = g.inv(p1_longitude, p1_latitude, obj_longitude, obj_latitude)
azimuth = result[0]
back_azimuth = result[1]
distance_2d = result[2]
# inv()で求めた距離が分かれば、GPSの高度と合わせて仰角(elevation)が分かる
# math.degrees()はmath.atan2()の戻り値がRadianなので、Degree(°)に変換している。
elevation = math.degrees(math.atan2(obj_altitude, distance_2d)
# 飛行物体までの直線距離(distance_3d)はmathを使ってピタゴラスの定理
# math.pypotで求められる。
distance_3d = math.hypot(distance_2d, obj_altitude)
print '基準となる位置から飛行物体までの地図上距離は' + str(distance_2d) + "m"
print '基準となる位置から飛行物体までの直線距離は' + str(distance_3d) + "m"
print '基準となる位置から飛行物体までの方位角は' + str(azimuth) + "°"
print '基準となる位置から飛行物体までの反方位角は' + str(back_azimuth) +"°"
print '基準となる位置から飛行物体までの仰角は' + str(elevation) + "°"