結果

環境
- Unity 2021.3.19
- OpenCV plus Unity
- Microsoft.Azure.Kinect.Sensor.1.4.1(NuGet)
実装
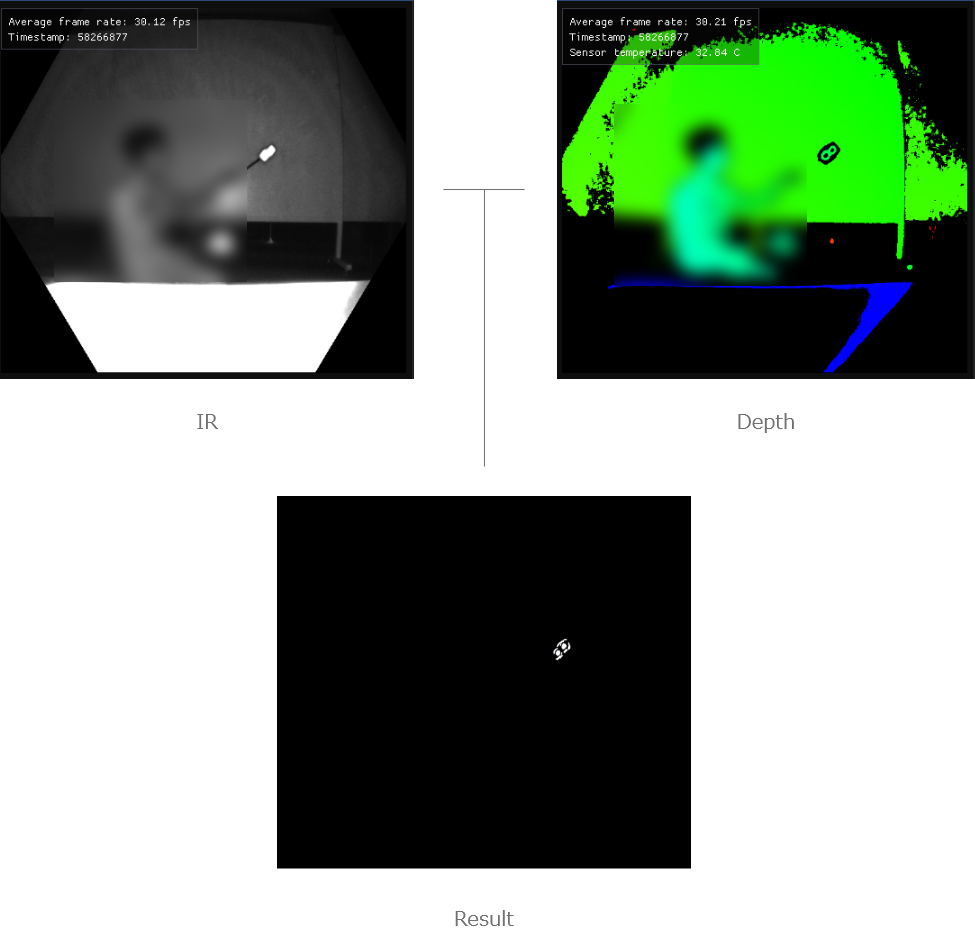
実装方法としてはAzure Kinect DKに搭載されているDepthカメラの映像をIRカメラの映像でマスクして実装する
以下の画像はイメージです
using System.Threading.Tasks;
using Microsoft.Azure.Kinect.Sensor;
using OpenCvSharp;
using UnityEngine;
using UnityEngine.UI;
using Image = Microsoft.Azure.Kinect.Sensor.Image;
using Cysharp.Threading.Tasks;
public class OpenCVPlusUnity : MonoBehaviour
{
[SerializeField] private RawImage _renderer;
[SerializeField] private int _depthDistanceMin = 500;
[SerializeField] private int _depthDistanceMax = 2000;
[Space(10)] [SerializeField] private int _irDistanceMin = 500;
[SerializeField] private int _irDistanceMax = 2000;
[Space(10)] [SerializeField] private int _depthThresholdMin = 254;
[SerializeField] private int _depthThresholdMax = 255;
[Space(10)] [SerializeField] private int _irThresholdMin = 254;
[SerializeField] private int _irThresholdMax = 255;
[Space(10)] [SerializeField] private bool isMask = true;
private Device _kinectDevice = null;
private void Start()
{
InitKinect();
StartLoop().Forget();
}
void OnDestroy()
{
//Kinectの停止
_kinectDevice.StopCameras();
}
/// <summary>
/// Kinectの初期化
/// </summary>
private void InitKinect()
{
_kinectDevice = Device.Open(0);
_kinectDevice.StartCameras(new DeviceConfiguration
{
ColorFormat = ImageFormat.ColorBGRA32,
ColorResolution = ColorResolution.R720p,
DepthMode = DepthMode.NFOV_Unbinned,
SynchronizedImagesOnly = true,
CameraFPS = FPS.FPS30
});
}
private async UniTaskVoid StartLoop()
{
//最終的に表示する画像サイズに合わせる
//640 x 576 * 2
_renderer.rectTransform.sizeDelta = new Vector2(1280, 1152);
Texture2D outDstTexture = new Texture2D(1, 1);
while (true)
{
using (Capture capture = await Task.Run(() => _kinectDevice.GetCapture()).ConfigureAwait(true))
{
MonoBehaviour.Destroy(_renderer.texture);
//深度カメラの処理
Mat depthMat = new Mat();
depthMat = ViewDepthImage(capture);
depthMat.Reshape(1);
//深度カメラの画像のチャンネル数とタイプを変更
Mat tempDepthMatGray = new Mat();
Cv2.CvtColor(depthMat, tempDepthMatGray, ColorConversionCodes.RGB2GRAY);
depthMat.Dispose();
Mat tempDepthMatBit = new Mat();
Cv2.Threshold(tempDepthMatGray, tempDepthMatBit, _depthThresholdMin, _depthThresholdMax,
ThresholdTypes.Binary);
tempDepthMatGray.Dispose();
//IRカメラの処理
Mat irMat = new Mat();
irMat = ViewIRImage(capture);
irMat.Reshape(1);
//IRカメラの画像のチャンネル数とタイプを変更
Mat tempIrMatGray = new Mat();
Cv2.CvtColor(irMat, tempIrMatGray, ColorConversionCodes.RGB2GRAY);
irMat.Dispose();
Mat tempIrMatBit = new Mat();
Cv2.Threshold(tempIrMatGray, tempIrMatBit, _irThresholdMin, _irThresholdMax, ThresholdTypes.BinaryInv);
tempIrMatGray.Dispose();
if (isMask)
{
//マスクをかける
Mat outDst = new Mat();
Cv2.BitwiseAnd(tempDepthMatBit, tempDepthMatBit, outDst, tempIrMatBit);
//Texture2Dに変換と適応
outDstTexture = new Texture2D(outDst.Width, outDst.Height, TextureFormat.RGBA32, false);
OpenCvSharp.Unity.MatToTexture(outDst, outDstTexture);
_renderer.texture = outDstTexture;
}
else
{
outDstTexture = new Texture2D(tempDepthMatBit.Width, tempDepthMatBit.Height,
TextureFormat.RGBA32, false);
OpenCvSharp.Unity.MatToTexture(tempDepthMatBit, outDstTexture);
_renderer.texture = outDstTexture;
}
tempDepthMatBit.Dispose();
tempIrMatBit.Dispose();
capture.Dispose();
}
}
}
private Mat ViewColorImage(Capture capture)
{
Image colorImage = capture.Color;
int pixelWidth = colorImage.WidthPixels;
int pixelHeight = colorImage.HeightPixels;
BGRA[] bgraArr = colorImage.GetPixels<BGRA>().ToArray();
Color32[] colorArr = new Color32[bgraArr.Length];
for (int i = 0; i < colorArr.Length; i++)
{
int index = colorArr.Length - 1 - i;
colorArr[i] = new Color32(
bgraArr[index].R,
bgraArr[index].G,
bgraArr[index].B,
bgraArr[index].A
);
}
colorImage.Dispose();
return GetMat(pixelWidth, pixelHeight, colorArr);
}
private Mat ViewDepthImage(Capture capture)
{
Image depthImage = capture.Depth;
int pixelWidth = depthImage.WidthPixels;
int pixelHeight = depthImage.HeightPixels;
ushort[] depthByteArr = depthImage.GetPixels<ushort>().ToArray();
Color32[] colorArr = new Color32[depthByteArr.Length];
for (int i = 0; i < colorArr.Length; i++)
{
int index = colorArr.Length - 1 - i;
int depthVal = 255 - (255 * (depthByteArr[index] - _depthDistanceMin) / _depthDistanceMax);
if (depthVal < 0)
{
depthVal = 0;
}
else if (depthVal > 255)
{
depthVal = 255;
}
colorArr[i] = new Color32(
(byte)depthVal,
(byte)depthVal,
(byte)depthVal,
255
);
}
depthImage.Dispose();
return GetMat(pixelWidth, pixelHeight, colorArr);
}
private Mat ViewIRImage(Capture capture)
{
Image irImage = capture.IR;
int pixelWidth = irImage.WidthPixels;
int pixelHeight = irImage.HeightPixels;
ushort[] irByteArr = irImage.GetPixels<ushort>().ToArray();
Color32[] colorArr = new Color32[irByteArr.Length];
for (int i = 0; i < colorArr.Length; i++)
{
int index = colorArr.Length - 1 - i;
int irVal = 255 - (255 * (irByteArr[index] - _irDistanceMin) / _irDistanceMax);
if (irVal < 0)
{
irVal = 0;
}
else if (irVal > 255)
{
irVal = 255;
}
colorArr[i] = new Color32(
(byte)irVal,
(byte)irVal,
(byte)irVal,
255
);
}
irImage.Dispose();
return GetMat(pixelWidth, pixelHeight, colorArr);
}
/// <summary>
/// Color32[]からMatを作成する
/// </summary>
/// <param name="width"></param>
/// <param name="height"></param>
/// <param name="colorArr"></param>
/// <returns></returns>
private Mat GetMat(int width, int height, Color32[] colorArr)
{
return OpenCvSharp.Unity.PixelsToMat(colorArr, width, height, false, false, 0);
}
}
Colorカメラの映像をIRカメラの映像でマスクして、その後の画像認識で物体の位置と認識の精度を上げることを想定していたがColorカメラとIR,Depthカメラの画角と映像の比率が違ったり大変だったのもありIRとDepthだけでマスクの実装することにした。