MATLABでボートレース解析をする11番目くらいの記事です。
外に出れないのは暇ですね。。
「不要不急の外出を控えるように」=「ボートレースでもしてなさい」という解釈にしてプログラムでも作りましょう。。
展示航走で、誰がどこを走ってるのか見てみよう。
展示って事前にやる練習みたいなやつです。さっきやってた鳴門の8レース。
カメラの位置がスタンド側(手前)の上の方についてるので、どこを回ってるのかよくわからないですね。
真上から見てみよう!
鳴門の航空写真をとってきましたけど、こんな感じの視点で見たらわかりやすそう。
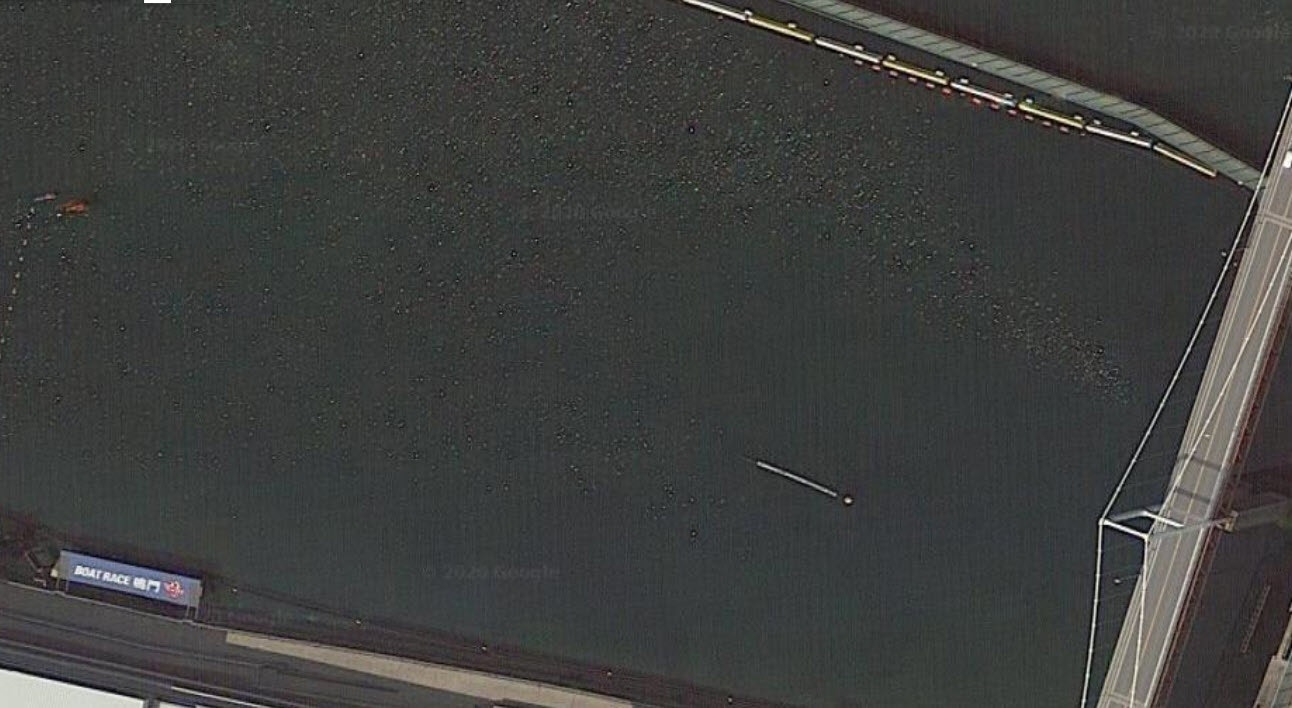
ただ、そんなところにカメラはないしドローンも飛ばしちゃダメなので、MATLAB を使いましょう。
まずは座標変換の準備。
Image Processing Toolbox で適当な4点を選んで Projective 変換しましょう。動画なので Computer Vision Toolbox も必要です。
vfr = vision.VideoFileReader('naru8.mp4'); % 展示の動画
frame = vfr();
map = imread('naruto_map.jpg'); % さっきの航空写真
cpselect(frame,map)
選択メニューが出るので、共通するわかりやすい4点を左右で選びましょう!
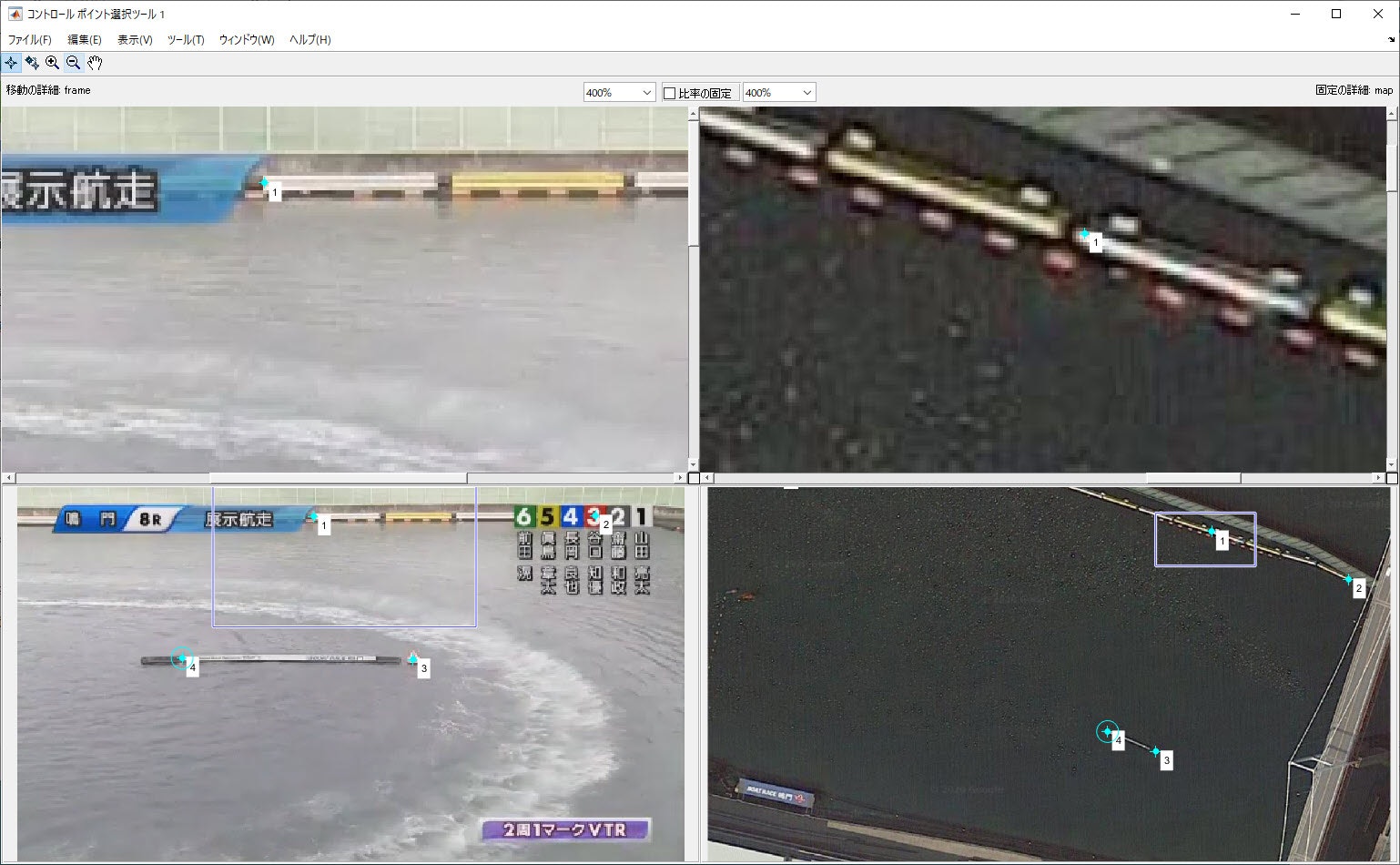
後ろのバンパー2箇所と、ターンマークと、ネトロン(フワフワ棒)の色の変わり目なんかをクリックしておこうかな。数字の3の後ろあたりにバンパーの端があります。
できたらメニューから点をエクスポート!
クリックした点を元に座標変換をしよう。
展示航走のカメラは固定っぽいので、1回クリックしてエクスポートしたらその座標は保存しておきましょう。
以下のような4点が得られていれば、試しに以下のコマンドを実行!
movingPoints = [ 212.875 21.375
414.625 20.875
284.125 123.875
118.625 122.875];
fixedPoints = [ 954.00 84.125
1213.50 174.875
848.70 500.431
757.17 462.92];
tform = fitgeotrans(movingPoints,fixedPoints,'Projective');
output = imwarp(frame,tform);
imshow(output)
結果↓↓↓

上の方と右の方の文字が伸びたところは要らんな。
output = imcrop(output,[5 600 230 330]);
imshow(output)

俯瞰っぽいのと、航空写真と同じような角度のネトロンになってそうだから、こんな感じでいいか。
パラメーターが決まったら動画で試そう。
あとはもう簡単。
%% 読み込み
vfr = vision.VideoFileReader('naru8.mp4');
player = vision.DeployableVideoPlayer;
%% プロパティ
movingPoints = [ 212.875 21.375
414.625 20.875
284.125 123.875
118.625 122.875];
fixedPoints = [ 954.00 84.125
1213.50 174.875
848.70 500.431
757.17 462.92];
tform = fitgeotrans(movingPoints,fixedPoints,'Projective');
%% ステップ
while ~isDone(vfr)
frame = vfr();
output = imwarp(frame,tform);
output = imcrop(output,[5 600 230 330]);
player(output)
end
%% 開放
release(vfr)
release(player)
結果↓↓↓
4号艇と6号艇がいい角度!
あとは画像処理で航跡でも追ってみたらいいね。
とりあえず今回はプログラムよりも、GIF を作るのが大変だったからここまで・・・
気に入ったら LGTM しておいてね!