今回はbox2dwebで回転ジョイントをやります。
回転ジョイントはモーターのような役割を果たします
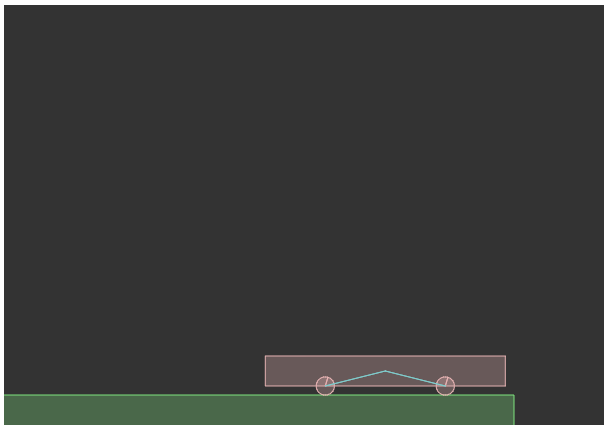
今回のスクリーンショットです
台車に接続された車輪が回転することで
台車が移動します
今回の全ソースコードです。
test.html
<canvas id="canvas" width="600px" height="420px" style="background-color:#333333;"></canvas>
<script type="text/javascript" src="Box2dWeb-2.1.a.3.min.js"></script>
<script type="text/javascript">
// Box2Dオブジェクトを取得
var b2Vec2 = Box2D.Common.Math.b2Vec2 // 2Dベクトル
, b2BodyDef = Box2D.Dynamics.b2BodyDef // Body定義
, b2Body = Box2D.Dynamics.b2Body // Body
, b2FixtureDef = Box2D.Dynamics.b2FixtureDef // Fixture定義
, b2Fixture = Box2D.Dynamics.b2Fixture // Fixture
, b2World = Box2D.Dynamics.b2World // 物理世界
, b2PolygonShape = Box2D.Collision.Shapes.b2PolygonShape // 衝突オブジェクトの形状(ポリゴン)
, b2CircleShape = Box2D.Collision.Shapes.b2CircleShape // 衝突オブジェクトの形状(円)
, b2RevoluteJointDef = Box2D.Dynamics.Joints.b2RevoluteJointDef // 回転ジョイント
, b2DebugDraw = Box2D.Dynamics.b2DebugDraw // デバッグ描画
// 世界を作る
var world = new b2World(new b2Vec2(0,10), true);
/////////////////////////////
var bodyDef = new b2BodyDef;
bodyDef.type = b2Body.b2_dynamicBody;
var fixDef = new b2FixtureDef;
fixDef.density = 30;
fixDef.friction = 10;
fixDef.restitution = 0.1;
fixDef.shape = new b2CircleShape(0.3);
// 車輪1
bodyDef.position.Set(8,10);
var wheel1=world.CreateBody(bodyDef);
wheel1.CreateFixture(fixDef);
// 車輪2
bodyDef.position.Set(12,10);
var wheel2=world.CreateBody(bodyDef);
wheel2.CreateFixture(fixDef);
// 台車
bodyDef.position.Set(10,9.5);
fixDef.shape = new b2PolygonShape;
fixDef.shape.SetAsBox(4,.5);
var car = world.CreateBody(bodyDef);
car.CreateFixture(fixDef);
// 回転ジョイント
var revoluteJointDef = new b2RevoluteJointDef();
revoluteJointDef.Initialize(car, wheel1, wheel1.GetWorldCenter());
revoluteJointDef.maxMotorTorque = 1100.0;// トルク力
revoluteJointDef.motorSpeed = 3.0; // 回転速度
revoluteJointDef.enableMotor = true; // モーターを有効化
var revoluteJointA = world.CreateJoint(revoluteJointDef);
revoluteJointDef.Initialize(car, wheel2, wheel2.GetWorldCenter());
revoluteJointDef.lowerAngle = -Math.PI/2; // 可動範囲の最小値
revoluteJointDef.upperAngle = Math.PI*5; // 可動範囲の最大値
revoluteJointDef.enableLimit = true; // 可動範囲を可動有効化
var revoluteJointB = world.CreateJoint(revoluteJointDef);
// 地面
var bodyDef = new b2BodyDef;
bodyDef.type = b2Body.b2_staticBody;
bodyDef.position.Set(-3,14);
var fd = new b2FixtureDef;
fd.shape = new b2PolygonShape;
fd.shape.SetAsBox(20,1);
var holder = world.CreateBody(bodyDef);
holder.CreateFixture(fd);
/////////////////////////////
// デバッグ描画の設定
var debugDraw = new b2DebugDraw();
debugDraw.SetSprite ( document.getElementById ("canvas").getContext ("2d"));
debugDraw.SetDrawScale(30); //描画スケール
debugDraw.SetFillAlpha(0.3); //半透明値
debugDraw.SetLineThickness(1.0);//線の太さ
debugDraw.SetFlags(b2DebugDraw.e_shapeBit | b2DebugDraw.e_jointBit);// 何をデバッグ描画するか
world.SetDebugDraw(debugDraw);
window.setInterval(update,1000/60);
function update() {
world.Step(1 / 60, 10, 10); // 物理世界を更新する
world.DrawDebugData(); // デバック描画
world.ClearForces(); // 物理世界上の力をリセットする
};
</script>
回転ジョイント用に
b2RevoluteJointDefオブジェクトを追加します。
var b2RevoluteJointDef = Box2D.Dynamics.Joints.b2RevoluteJointDef // 回転ジョイント
回転ジョイントを作成しているのは次の箇所です。
b2RevoluteJointDefオブジェクトのInitialize関数で
ひも付けする台車オブジェクトと車輪オブジェクト、車輪の位置を指定します。
maxMotorTorqueはトルク力(パワー)です
motorSpeedはモーターの回転スピードです
enableMotorをtrueにしてモーターを回転させます
// 回転ジョイント
var revoluteJointDef = new b2RevoluteJointDef();
revoluteJointDef.Initialize(car, wheel1, wheel1.GetWorldCenter());
revoluteJointDef.maxMotorTorque = 1100.0;
revoluteJointDef.motorSpeed = 3.0;
revoluteJointDef.enableMotor = true;
var revoluteJointA = world.CreateJoint(revoluteJointDef);
次は右側の車輪の設定です。
lowerAngleは可動範囲の最小値を指定します。
upperAngleは可動範囲の最大値を指定します。
enableLimitは回転の制限を有効化します
可動範囲を超えて回転させようとすると回転が止まります。
revoluteJointDef.Initialize(car, wheel2, wheel2.GetWorldCenter());
revoluteJointDef.lowerAngle = -Math.PI/2; // 可動範囲の最小値
revoluteJointDef.upperAngle = Math.PI*5; // 可動範囲の最大値
revoluteJointDef.enableLimit = true; // 可動範囲を可動有効化
var revoluteJointB = world.CreateJoint(revoluteJointDef);
おまけその1:
b2RevoluteJointDefオブジェクトのInitialize関数のジョイント対象に
world.GetGroundBody()を指定すると
物理世界に対して固定されて回転します
revoluteJointDef.Initialize(world.GetGroundBody(), wheel1, wheel1.GetWorldCenter());
台車の台のみ押し出されます
おまけその2:
途中でモーターを逆回転したい場合は
生成した回転ジョイントオブジェクトに対して
SetMotorSpeed関数でマイナスの値をいれてやると
逆回転になります
revoluteJointA.SetMotorSpeed(-3.0);