初めに
ラズパイでPC9685ボードを介してサーボモータを駆動します。
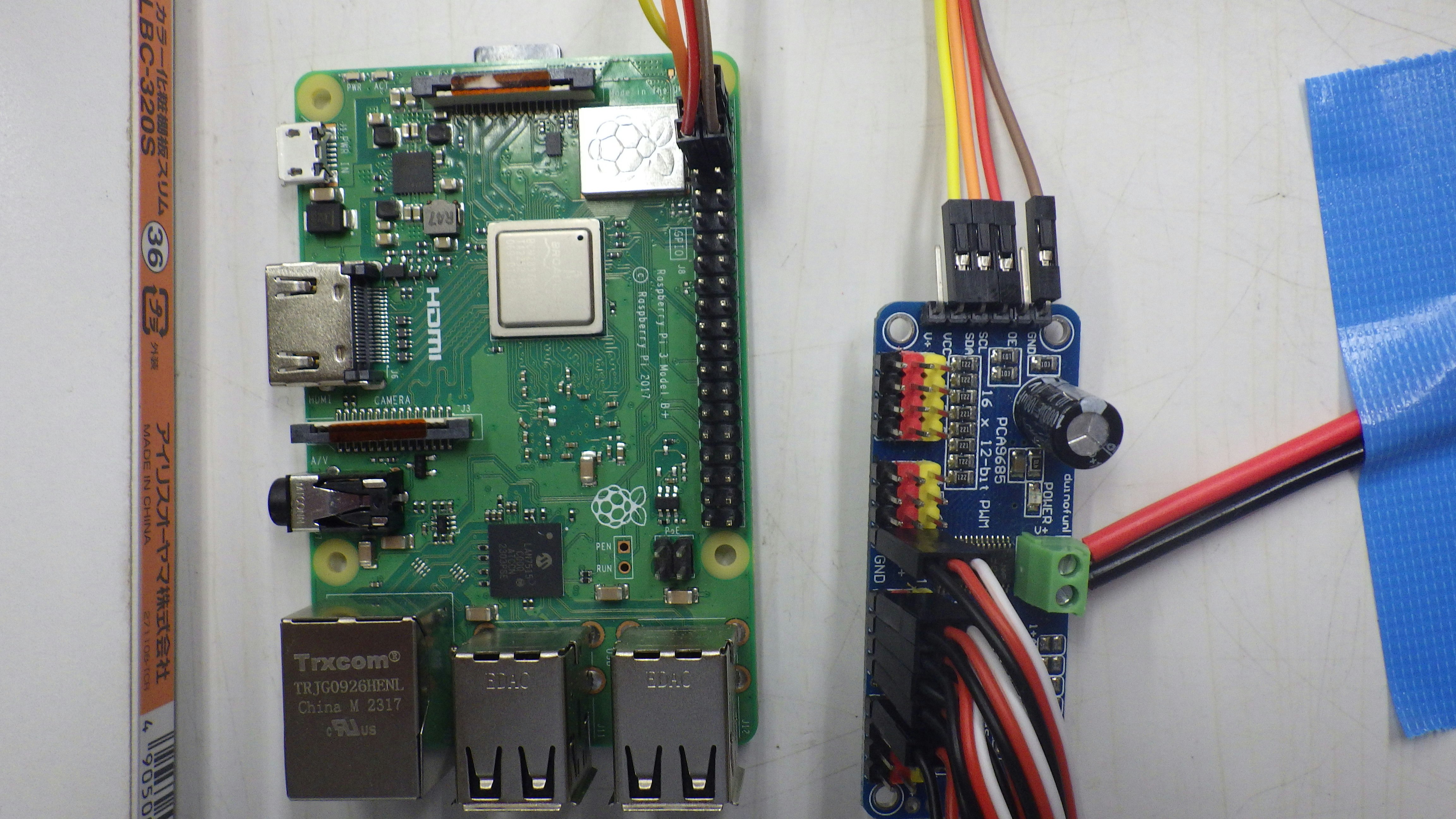
ラズパイ とPCA9685の接続
PCA9685ボードには、サーボ駆動用の電源を接続してください。
| ラズパイ | PCA9685 |
|---|---|
| 3V(Pin 01) | VCC |
| GND(Pin 06) | GND |
| SDA(Pin 03) | SDA |
| SCL(Pin 05) | SCL |
ラズパイのピン配置
ラズパイは内側ピンが奇数、外側ピンが偶数です
| 内側 | 外側 |
|---|---|
| 3V3(01) | 5V(02) |
| GPIO2,SDA (03) | 5V(04) |
| GPIO3,SCL (05) | GND(06) |
(注)ラズパイの3Vは他に17Pin、GNDは他に9,14,20,25,30,34,39Pin
I2CでPCA9685と通信する
Ubuntu の場合
ラズパイのI2Cを有効化する。
I2C接続、有効化
sudo apt install i2c-tools -y
sudo apt install python3-smbus -y
sudo adduser ubuntu i2c
sudo i2cdetect -r -y 1
I2Cアドレスの確認は以下の通り(-r は無くても可)で、0x40とか0x70などが表示されるはず
I2Cアドレスの確認
sudo i2cdetect -r -y 1
Rapsberry OS でI2Cを有効にする場合
記載例
$ sudo raspi-config
メニューが表示されるので、 "Interfacing Options" を選択する
新たなメニューが表示されるので、 "I2C" を選択する
次の画面で "はい"を選択する
I2C接続、アドレスの確認
$ sudo i2cdetect -y 1
PCA9685ライブラリの導入
PCA9685ライブラリの導入は、adafruitから出ている最新のものを利用する。
以下のうち、名前に circuit が入っていないライブラリは古いので導入しないこと。
これのドキュメント関係は以下のサイトをご覧ください。
https://github.com/adafruit/Adafruit_CircuitPython_PCA9685
PCA9685ライブラリの導入
$ sudo pip3 install adafruit-circuitpython-pca9685
This environment is externally managed などのエラーが出る場合は、
仮想環境で使用するか(参考文献 2 参照)、--break-system-package オプションをつけて無理やり実行する、のいずれかを選択ください。
6自由度のロボットアームのデモ用プログラム
サーボモータはMG996Rを使用しました。SG90ではないので注意下さい。
servo_control.py
import time
import board
from adafruit_motor import servo
from adafruit_pca9685 import PCA9685
i2c = board.I2C() # I2C 設定
pca = PCA9685(i2c) # インスタンス生成
pca.frequency = 50 # 基準周波数50Hz、パルス幅20ms
minp=500
maxp=2500
servo7 = servo.Servo(pca.channels[7], min_pulse=minp, max_pulse=maxp)
servo8 = servo.Servo(pca.channels[8], min_pulse=minp, max_pulse=maxp)
servo9 = servo.Servo(pca.channels[9], min_pulse=minp, max_pulse=maxp)
servo10 = servo.Servo(pca.channels[10], min_pulse=minp, max_pulse=maxp)
servo11 = servo.Servo(pca.channels[11], min_pulse=minp, max_pulse=maxp)
servo12 = servo.Servo(pca.channels[12], min_pulse=minp, max_pulse=maxp)
servo7.angle = 0 # 0(right)-90(center)-180(left)
servo8.angle = 150 # 90(down)-150(up)
servo9.angle = 100 # 60(up)-150(down)
servo10.angle = 180 # 100(up)-180(down)
servo11.angle = 60 # fixed
servo12.angle = 50 # 50(open)-120(close)
while True:
for i in range(100,60,-1):
servo9.angle = i
time.sleep(0.02)
for i in range(0,90,1):
servo7.angle = i
time.sleep(0.02)
for i in range(60,100,1):
servo9.angle = i
time.sleep(0.02)
for i in range(50,100,1):
servo12.angle = i
time.sleep(0.02)
for i in range(100,60,-1):
servo9.angle = i
time.sleep(0.02)
for i in range(90,0,-1):
servo7.angle = i
time.sleep(0.02)
for i in range(60,100,1):
servo9.angle = i
time.sleep(0.02)
for i in range(100,50,-1):
servo12.angle = i
time.sleep(0.02)
pca.deinit()
参考文献
記事内リンク [初めに戻る] (#参考文献)