MobileNet V2について構造の説明と実装のメモ書きです。
ただし、論文すべてを見るわけでなく構造のところを中心に見ていきます。
勉強のメモ書き程度でありあまり正確に実装されていませんので、ご了承ください。
自分の実力不足で読み解けなくなってきています。難しいです。
以下の論文について実装を行っていきます。
タイトル:MobileNetV2: Inverted Residuals and Linear Bottlenecks
MobileNet V1は前回扱いました。
MobileNet V2
Inverted Residual block(bottleneck block)
MobileNet V1で扱ったDepthwise Separable Convolutionsにbottleneck構造を持たせます。
図の(d)のように3×3のdepthwise convolutionをpointwise convolutionで挟み込んだ構造となります。
1つ目のpointwise convでチャンネル数を増加させ、2つ目のpointwise convでチャンネル数を減少させます。

さらに下の図の右側のようにResidual接続を持たせます。

このbottleneckの構造を詳しく見ます。

$k$は入力、$k'$は出力のチャンネル数、$t$はチャンネル数の倍率、$s$はストライドを表します。
非線形関数としてReLU6が使用されています。これは出力の最大値を6としてクリップする関数となります。
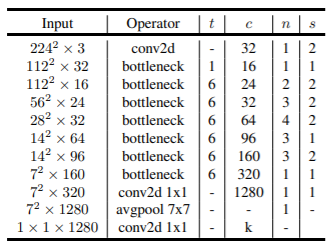
次にMobileNet V2の構造を確認します。$n$はブロックの繰り返し数となります。
複数回繰り返す場合は、最初のブロックでチャンネル数が拡張、strideが2の場合も最初のブロックのみ適用となります。
bottleneckのresiduak接続は入力と出力の形式が同じときのみ適用とします。
学習
最適化手法はRMSpropを使用しdecayとmomentumは0.9とします。そしてweight decayは0.00004です。学習率は初期値を0.045としてエポックごとに減衰率0.98で減衰させていきます。
実装
MobileNetV1と大きく変わりません。
keras
必要なライブラリのインポートをします。
import tensorflow.keras as keras
import tensorflow as tf
from tensorflow.keras.models import Sequential, Model
from tensorflow.keras.layers import Input, Conv2D, Activation, Dense, GlobalAveragePooling2D, BatchNormalization, DepthwiseConv2D, Add
from keras.layers.merge import concatenate
from tensorflow.keras import backend as K
from tensorflow.keras.optimizers import RMSprop
from tensorflow.keras.callbacks import LearningRateScheduler
from keras.datasets import cifar10
import numpy as np
import cv2
Inverted Residual block実装をします。
class Inverted_Residual_block(Model):
def __init__(self, in_channels, out_channels, s, t):
super().__init__()
k = in_channels
self.conv1 = Conv2D(filters = t*k, kernel_size = (1,1), padding = 'same')
self.bn1 = BatchNormalization()
self.relu1 = tf.nn.relu6
self.conv2 = DepthwiseConv2D(kernel_size = (3,3), strides=s, padding = 'same')
self.bn2 = BatchNormalization()
self.relu2 = tf.nn.relu6
self.conv3 = Conv2D(filters = out_channels, kernel_size = (1,1), padding = 'same')
self.bn3 = BatchNormalization()
self.relu3 = tf.nn.relu6
self.add = Add()
def call(self, x):
out = self.conv1(x)
out = self.bn1(out)
out = self.relu1(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu2(out)
out = self.conv3(out)
out = self.bn3(out)
out = self.relu3(out)
if K.int_shape(out) == K.int_shape(x):
out = self.add([out, x])
return out
論文の構造の表に沿って実装できるようにbottleneckを実装します。
class bottleneck(Model):
def __init__(self, in_channels, t, c, n, s):
super().__init__()
S = np.ones(n)
S[0] = s
self.bottleneck = Sequential([Inverted_Residual_block(in_channels=in_channels, out_channels=c, s=int(S[i]), t=t) for i in range(n)])
def call(self, x):
x = self.bottleneck(x)
return x
MobileNetV2の本体を実装します。
class MobileNetV2(Model):
def __init__(self):
super().__init__()
self.conv1 = Conv2D(32, kernel_size=3, strides=2, padding="same")
self.bn1 = BatchNormalization()
self.relu1 = tf.nn.relu6
self.bottleneck1 = bottleneck(in_channels=32, t=1, c=16, n=1, s=1)
self.bottleneck2 = bottleneck(in_channels=16, t=6, c=24, n=2, s=2)
self.bottleneck3 = bottleneck(in_channels=24, t=6, c=32, n=3, s=2)
self.bottleneck4 = bottleneck(in_channels=32, t=6, c=64, n=4, s=2)
self.bottleneck5 = bottleneck(in_channels=64, t=6, c=96, n=3, s=1)
self.bottleneck6 = bottleneck(in_channels=96, t=6, c=160, n=3, s=2)
self.bottleneck7 = bottleneck(in_channels=160, t=6, c=320, n=1, s=1)
self.conv2 = Conv2D(1280, kernel_size=1, strides=1, padding="same")
self.bn2 = BatchNormalization()
self.relu2 = tf.nn.relu6
self.pool = GlobalAveragePooling2D()
self.fc = Dense(10, activation='softmax')
def call(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu1(x)
x = self.bottleneck1(x)
x = self.bottleneck2(x)
x = self.bottleneck3(x)
x = self.bottleneck4(x)
x = self.bottleneck5(x)
x = self.bottleneck6(x)
x = self.bottleneck7(x)
x = self.conv2(x)
x = self.bn2(x)
x = self.relu2(x)
x = self.pool(x)
x = self.fc(x)
return x
構造の確認をします。
model = MobileNetV2()
model.build((None, 224, 224, 3)) # build with input shape.
dummy_input = Input(shape=(224, 224, 3)) # declare without batch demension.
model_summary = Model(inputs=[dummy_input], outputs=model.call(dummy_input))
model_summary.summary()

学習の設定をします。
epochs = 100
initial_lrate = 0.045
def decay(epoch, steps=100):
initial_lrate = 0.045
drop = 0.98
epochs_drop = 3
lrate = initial_lrate * math.pow(drop, math.floor((1+epoch)/epochs_drop))
return lrate
sgd = RMSprop(lr=initial_lrate, rho=0.9, epsilon=1.0, decay=0.9)
lr_sc = LearningRateScheduler(decay, verbose=1)
model = MobileNetV2()
model.compile(loss=['categorical_crossentropy'], optimizer=sgd, metrics=['accuracy'])
転移学習(keras)
全結合層を付け替えて、追加した部分だけを学習させます。
from keras.applications.mobilenet_v2 import MobileNetV2
input_shape = (224,224,3)
num_classes = 10
base_model = MobileNetV2(weights='imagenet', include_top=False, input_shape=input_shape)
x = base_model.output
x = GlobalAveragePooling2D()(x)
#x = Dense(1024, activation='relu')(x)
output = Dense(num_classes, activation='softmax')(x)
model = Model(inputs=base_model.input, outputs=output)
for layer in base_model.layers:
layer.trainable = False
設定は変わりません。
epochs = 100
initial_lrate = 0.045
def decay(epoch, steps=100):
initial_lrate = 0.045
drop = 0.98
epochs_drop = 3
lrate = initial_lrate * math.pow(drop, math.floor((1+epoch)/epochs_drop))
return lrate
sgd = RMSprop(lr=initial_lrate, rho=0.9, epsilon=1.0, decay=0.9)
lr_sc = LearningRateScheduler(decay, verbose=1)
model.compile(loss=['categorical_crossentropy'], optimizer=sgd, metrics=['accuracy'])
pytorch
pytorchも同様に実装をします。
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
import pytorch_lightning as pl
from torchmetrics import Accuracy as accuracy
DepthWise Convolutionはnn.Conv2dのgroupsを入力チャンネルと同じにすることで実行します。
class Depthwise_Separable_convolutions(nn.Module):
def __init__(self, in_channels, out_channels, stride):
super().__init__()
self.conv_dw = nn.Conv2d(in_channels=in_channels, out_channels=in_channels, kernel_size = (3,3), stride=stride, groups=in_channels, padding = 1)
self.bn1 = nn.BatchNorm2d(in_channels)
self.relu1 = nn.ReLU(inplace=False)
self.conv_pw = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size = (1,1), padding = 'same')
self.bn2 = nn.BatchNorm2d(out_channels)
self.relu2 = nn.ReLU(inplace=False)
def forward(self, x):
x = self.conv_dw(x)
x = self.bn1(x)
x = self.relu1(x)
x = self.conv_pw(x)
x = self.bn2(x)
x = self.relu2(x)
return x
Inverted_Residual_blockの実装
class Inverted_Residual_block(nn.Module):
def __init__(self, in_channels, out_channels, s, t):
super().__init__()
k = in_channels
self.conv1 = nn.Conv2d(in_channels=in_channels, out_channels=t*k, kernel_size = (1,1))
self.bn1 = nn.BatchNorm2d(t*k)
self.relu1 = F.relu6
self.conv2 = Depthwise_Separable_convolutions(in_channels=t*k, out_channels=out_channels, stride=s)
self.bn2 = nn.BatchNorm2d(out_channels)
self.relu2 = F.relu6
self.conv3 = nn.Conv2d(in_channels=out_channels, out_channels=out_channels, kernel_size = (1,1))
self.bn3 = nn.BatchNorm2d(out_channels)
self.relu3 = F.relu6
self._change = (in_channels==out_channels)&(s==1)
def forward(self, x):
out = self.conv1(x)
out = self.bn1(out)
out = self.relu1(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu2(out)
out = self.conv3(out)
out = self.bn3(out)
out = self.relu3(out)
if self._change:
out = out + x
return out
論文のbottleneck部分を実装しておきます。
class bottleneck(nn.Module):
def __init__(self, in_channels, t, c, n, s):
super().__init__()
S = np.ones(n)
S[0] = s
IN = np.ones(n)*c
IN[0] = in_channels
self.bottleneck = nn.Sequential(*[Inverted_Residual_block(in_channels=int(IN[i]), out_channels=c, s=int(S[i]), t=t) for i in range(n)])
def forward(self, x):
x = self.bottleneck(x)
return x
MobileNetV2の本体の実装をします。
class MobileNetV2(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(3, 32, kernel_size=3, stride=2, padding=1)
self.bn1 = nn.BatchNorm2d(32)
self.relu1 = F.relu6
self.bottleneck1 = bottleneck(in_channels=32, t=1, c=16, n=1, s=1)
self.bottleneck2 = bottleneck(in_channels=16, t=6, c=24, n=2, s=2)
self.bottleneck3 = bottleneck(in_channels=24, t=6, c=32, n=3, s=2)
self.bottleneck4 = bottleneck(in_channels=32, t=6, c=64, n=4, s=2)
self.bottleneck5 = bottleneck(in_channels=64, t=6, c=96, n=3, s=1)
self.bottleneck6 = bottleneck(in_channels=96, t=6, c=160, n=3, s=2)
self.bottleneck7 = bottleneck(in_channels=160, t=6, c=320, n=1, s=1)
self.conv2 = nn.Conv2d(320, 1280, kernel_size=1, stride=1)
self.bn2 = nn.BatchNorm2d(1280)
self.relu2 = F.relu6
self.pool = nn.AdaptiveAvgPool2d((1,1))
self.fc = nn.Linear(1280,10)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu1(x)
x = self.bottleneck1(x)
x = self.bottleneck2(x)
x = self.bottleneck3(x)
x = self.bottleneck4(x)
x = self.bottleneck5(x)
x = self.bottleneck6(x)
x = self.bottleneck7(x)
x = self.conv2(x)
x = self.bn2(x)
x = self.relu2(x)
x = self.pool(x)
x = x.view(x.shape[0], -1)
x = self.fc(x)
return x
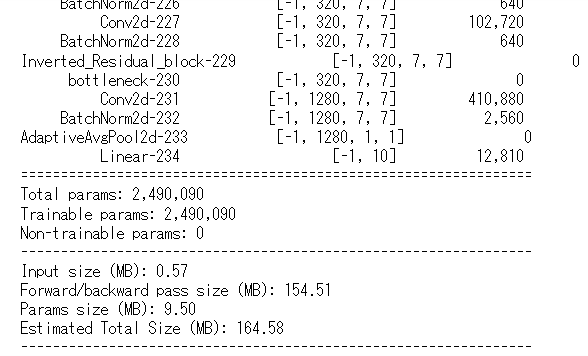
構造の確認をします。
from torchsummary import summary
summary(MobileNetV2(), (3,224,224))
学習の設定をします。
class MobileNetV1Trainer(pl.LightningModule):
def __init__(self):
super().__init__()
self.model = MobileNetV2()
def forward(self, x):
x = self.model(x)
return x
def training_step(self, batch, batch_idx):
x, y = batch
#x, y = x.to(device), y.to(device)
y_hat = self.forward(x)
loss = nn.CrossEntropyLoss()(y_hat, y)
return {'loss': loss, 'y_hat':y_hat, 'y':y, 'batch_loss': loss.item()*x.size(0)}
def validation_step(self, batch, batch_idx):
x, y = batch
#x, y = x.to(device), y.to(device)
y_hat = self.forward(x)
loss = nn.CrossEntropyLoss()(y_hat, y)
return {'y_hat':y_hat, 'y':y, 'batch_loss': loss.item()*x.size(0)}
def test_step(self, batch, batch_nb):
x, y = batch
#x, y = x.to(device), y.to(device)
y_hat = self.forward(x)
loss = nn.CrossEntropyLoss()(y_hat, y)
y_label = torch.argmax(y_hat, dim=1)
acc = accuracy()(y_label, y)
return {'test_loss': loss, 'test_acc': acc}
def training_epoch_end(self, train_step_output):
y_hat = torch.cat([val['y_hat'] for val in train_step_outputs], dim=0)
y = torch.cat([val['y'] for val in train_step_outputs], dim=0)
epoch_loss = sum([val['batch_loss'] for val in train_step_outputs]) / y_hat.size(0)
preds = torch.argmax(y_hat, dim=1)
acc = accuracy()(preds, y)
self.log('train_loss', epoch_loss, prog_bar=True, on_epoch=True)
self.log('train_acc', acc, prog_bar=True, on_epoch=True)
print('---------- Current Epoch {} ----------'.format(self.current_epoch + 1))
print('train Loss: {:.4f} train Acc: {:.4f}'.format(epoch_loass, acc))
def validation_epoch_end(self, val_step_outputs):
y_hat = torch.cat([val['y_hat'] for val in val_step_outputs], dim=0)
y = torch.cat([val['y'] for val in val_step_outputs], dim=0)
epoch_loss = sum([val['batch_loss'] for val in val_step_outputs]) / y_hat.size(0)
preds = torch.argmax(y_hat, dim=1)
acc = accuracy()(preds, y)
self.log('val_loss', epoch_loss, prog_bar=True, on_epoch=True)
self.log('val_acc', acc, prog_bar=True, on_epoch=True)
print('valid Loss: {:.4f} valid Acc: {:.4f}'.format(epoch_loss, acc))
# New: テストデータに対するエポックごとの処理
def test_epoch_end(self, test_step_outputs):
y_hat = torch.cat([val['y_hat'] for val in test_step_outputs], dim=0)
y = torch.cat([val['y'] for val in test_step_outputs], dim=0)
epoch_loss = sum([val['batch_loss'] for val in test_step_outputs]) / y_hat.size(0)
preds = torch.argmax(y_hat, dim=1)
acc = accuracy()(preds, y)
self.log('test_loss', epoch_loss, prog_bar=True, on_epoch=True)
self.log('test_acc', acc, prog_bar=True, on_epoch=True)
print('test Loss: {:.4f} test Acc: {:.4f}'.format(epoch_loss, acc))
def configure_optimizers(self):
optimizer = optim.RMSprop(self.parameters(), lr=0.045, eps=1.0, momentum=0.9)
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=3, gamma=0.02)
return {'optimizer': optimizer, 'lr_scheduler': scheduler}
転移学習(pytorch)
torch.hubで学習済みのモデルを取得
import torch
model = torch.hub.load('pytorch/vision:v0.10.0', 'mobilenet_v2', pretrained=True)
torchvisionで学習済みのモデルを取得
torch.hubのものと変わりません。
from torchvision.models import mobilenetv2
model = mobilenetv2.mobilenet_v2(pretrained=True)
最後の全結合層のみ学習させるものとして、学習の設定をします。
class MobileNetV2Trainer(pl.LightningModule):
def __init__(self):
super(VGGTrainer, self).__init__()
model = mobilenetv2.mobilenet_v2(pretrained=True)
model.classifier[1] = nn.Linear(in_features=1280, out_features=10)
self.model = model
update_param_names = ['classifier.1.weight', 'classifier.1.bias']
for name, param in self.model.named_parameters():
if name in update_param_names:
param.requires_grad = True
else:
param.requires_grad = False
def forward(self, x):
x = self.model(x)
return x
def training_step(self, batch, batch_idx):
x, y = batch
#x, y = x.to(device), y.to(device)
y_hat = self.forward(x)
loss = nn.CrossEntropyLoss()(y_hat, y)
return {'loss': loss, 'y_hat':y_hat, 'y':y, 'batch_loss': loss.item()*x.size(0)}
def validation_step(self, batch, batch_idx):
x, y = batch
#x, y = x.to(device), y.to(device)
y_hat = self.forward(x)
loss = nn.CrossEntropyLoss()(y_hat, y)
return {'y_hat':y_hat, 'y':y, 'batch_loss': loss.item()*x.size(0)}
def test_step(self, batch, batch_nb):
x, y = batch
#x, y = x.to(device), y.to(device)
y_hat = self.forward(x)
loss = nn.CrossEntropyLoss()(y_hat, y)
y_label = torch.argmax(y_hat, dim=1)
acc = accuracy()(y_label, y)
return {'test_loss': loss, 'test_acc': acc}
def training_epoch_end(self, train_step_output):
y_hat = torch.cat([val['y_hat'] for val in train_step_outputs], dim=0)
y = torch.cat([val['y'] for val in train_step_outputs], dim=0)
epoch_loss = sum([val['batch_loss'] for val in train_step_outputs]) / y_hat.size(0)
preds = torch.argmax(y_hat, dim=1)
acc = accuracy()(preds, y)
self.log('train_loss', epoch_loss, prog_bar=True, on_epoch=True)
self.log('train_acc', acc, prog_bar=True, on_epoch=True)
print('---------- Current Epoch {} ----------'.format(self.current_epoch + 1))
print('train Loss: {:.4f} train Acc: {:.4f}'.format(epoch_loass, acc))
def validation_epoch_end(self, val_step_outputs):
y_hat = torch.cat([val['y_hat'] for val in val_step_outputs], dim=0)
y = torch.cat([val['y'] for val in val_step_outputs], dim=0)
epoch_loss = sum([val['batch_loss'] for val in val_step_outputs]) / y_hat.size(0)
preds = torch.argmax(y_hat, dim=1)
acc = accuracy()(preds, y)
self.log('val_loss', epoch_loss, prog_bar=True, on_epoch=True)
self.log('val_acc', acc, prog_bar=True, on_epoch=True)
print('valid Loss: {:.4f} valid Acc: {:.4f}'.format(epoch_loss, acc))
# New: テストデータに対するエポックごとの処理
def test_epoch_end(self, test_step_outputs):
y_hat = torch.cat([val['y_hat'] for val in test_step_outputs], dim=0)
y = torch.cat([val['y'] for val in test_step_outputs], dim=0)
epoch_loss = sum([val['batch_loss'] for val in test_step_outputs]) / y_hat.size(0)
preds = torch.argmax(y_hat, dim=1)
acc = accuracy()(preds, y)
self.log('test_loss', epoch_loss, prog_bar=True, on_epoch=True)
self.log('test_acc', acc, prog_bar=True, on_epoch=True)
print('test Loss: {:.4f} test Acc: {:.4f}'.format(epoch_loss, acc))
def configure_optimizers(self):
optimizer = optim.SGD(self.parameters(), lr=0.001, momentum=0.9, weight_decay=5e-4)
scheduler = torch.optim.lr_scheduler.ReduceLROnPlateau(optimizer, mode='min', factor=0.1, patience=10, threshold=0.0001)
#return [optimizer,], [scheduler,]
return {'optimizer': optimizer, 'lr_scheduler': scheduler, 'monitor': 'val_loss'}
以上で実装を終わります。