GoogleNetについて構造の説明と実装のメモ書きです。
ただし、論文すべてを見るわけでなく構造のところを中心に見ていきます。
勉強のメモ書き程度でありあまり正確に実装されていませんので、ご了承ください。
以下の論文について実装を行っていきます。
タイトル:Going deeper with convolutions
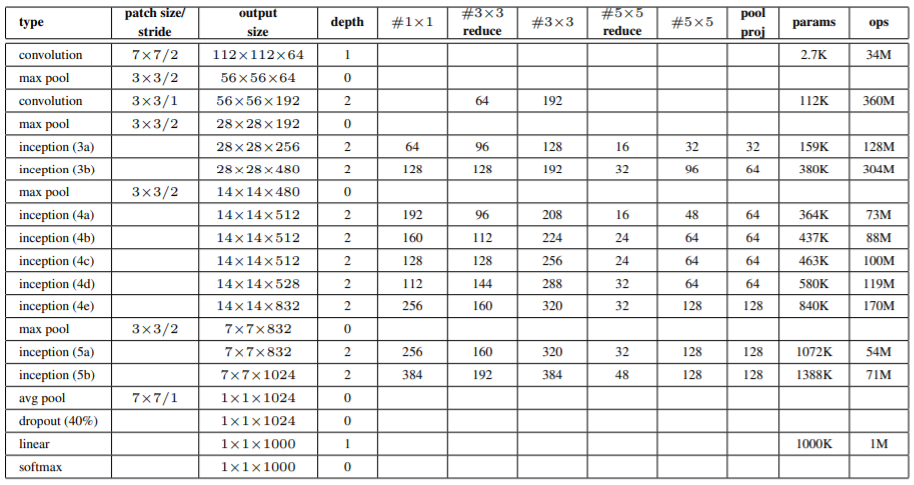
GoogleNet
Inception module
1×1、3×3、5×5の畳み込み層、そして3×3のMaxPooling層のそれぞれの出力を結合して1つの出力とします。
dimension reduction
3×3、5×5の畳み込み層の前にチャンネル数を削減するために1×1の畳み込み層を追加します。
さらにMaxPooling層の後にも1×1の畳み込み層を入れることでチャンネル数を変換します。

auxiliary classifier
最後の出力層とは別にinception module4aと4dからの出力を使用した分類器を用意します。
3つの出力に重みをつけて足し合わせて学習で使用する損失とします。
重みは最後の出力層は1、中間層からの2つは0.3とします。
推論時にはこれらの中間層からの予測結果は出さないようにします。
実装
keras
まず、必要なライブラリのインポートをします。
import tensorflow.keras as keras
import tensorflow as tf
from tensorflow.keras.models import Sequential, Model
from tensorflow.keras.layers import Input, Conv2D, Activation, MaxPooling2D, AveragePooling2D, Flatten, Dense, Dropout, GlobalAveragePooling2D, BatchNormalization, Add
from keras.layers.merge import concatenate
from tensorflow.keras import backend as K
from tensorflow.keras.optimizers import SGD
from tensorflow.keras.callbacks import LearningRateScheduler
from keras.datasets import cifar10
import numpy as np
import cv2
畳み込み層の一連の流れをまとめてクラスにします。
class conv_bn_relu(Model):
def __init__(self, out_channels, kernel_size=1, strides=1):
super(conv_bn_relu, self).__init__()
self.conv = Conv2D(out_channels, kernel_size=kernel_size, strides=strides, padding='same')
self.bn = BatchNormalization()
self.relu = Activation("relu")
def call(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.relu(x)
return x
途中の層の出力を使用した分類結果を出力させるInceptionAuxを実装します。
class InceptionAux(Model):
def __init__(self, num_classes):
super(InceptionAux, self).__init__()
self.pool = AveragePooling2D(pool_size = (5,5), strides = 3)
self.conv = conv_bn_relu(out_channels=128, kernel_size=1, strides=1)
self.flat = Flatten()
self.fc1 =Dense(1024, activation = 'relu')
self.fc2 = Dense(10, activation = 'softmax')
self.dropout = Dropout(0.7)
def call(self, x):
x = self.pool(x)
x = self.conv(x)
x = self.flat(x)
x = self.fc1(x)
x = self.dropout(x)
x = self.fc2(x)
return x
Inceptionの実装を行います。
4つの枝分かれを最後に結合します。
class Inception(Model):
def __init__(self, ch1x1, ch3x3red, ch3x3, ch5x5red, ch5x5, pool_proj):
super(Inception, self).__init__()
self.brabch1 = conv_bn_relu(out_channels=ch1x1, kernel_size=1, strides=1)
self.branch2 = Sequential([conv_bn_relu(out_channels=ch3x3red, kernel_size=1, strides=1),
conv_bn_relu(out_channels=ch3x3, kernel_size=3, strides=1)])
self.branch3 = Sequential([conv_bn_relu(out_channels=ch5x5red, kernel_size=1, strides=1),
conv_bn_relu(out_channels=ch5x5, kernel_size=5, strides=1)])
self.branch4 = Sequential([MaxPooling2D(pool_size=3, strides=1, padding='same'),
conv_bn_relu(out_channels=pool_proj, kernel_size=1, strides=1)])
def call(self, x):
brabch1 = self.brabch1(x)
brabch2 = self.branch2(x)
brabch3 = self.branch3(x)
brabch4 = self.branch4(x)
out = concatenate([brabch1, brabch2, brabch3, brabch4], axis = -1)
return out
GoogleNet本体の実装を行います。
class GoogleNet(Model):
def __init__(self, aux=True):
super(GoogleNet, self).__init__()
self.aux = aux
self.conv1 = conv_bn_relu(out_channels=64, kernel_size=7, strides=2)
self.pool1 = MaxPooling2D(pool_size=3, strides=2, padding='same')
self.conv2 = conv_bn_relu(out_channels=64, kernel_size=3, strides=1)
self.conv3 = conv_bn_relu(out_channels=192, kernel_size=3, strides=1)
self.pool2 = MaxPooling2D(pool_size=3, strides=2, padding='same')
self.inception_3a = Inception(64, 96, 128, 16, 32, 32)
self.inception_3b = Inception(128, 128, 192, 32, 96, 64)
self.pool3 = MaxPooling2D(pool_size=3, strides=2, padding='same')
self.inception_4a = Inception(192, 96, 208, 16, 48, 64)
self.inception_4b = Inception(160, 112, 224, 24, 64, 64)
self.inception_4c = Inception(128, 128, 256, 24, 64, 64)
self.inception_4d = Inception(112, 144, 288, 32, 64, 64)
self.inception_4e = Inception(256, 160, 320, 32, 128, 128)
self.pool4 = MaxPooling2D(pool_size=3, strides=2, padding='same')
self.inception_5a = Inception(256, 160, 320, 32, 128, 128)
self.inception_5b = Inception(384, 192, 384, 48, 128, 128)
self.pool5 = GlobalAveragePooling2D()
self.dropout = Dropout(0.4)
self.fc = Dense(10, activation = 'softmax')
if aux:
self.aux1 = InceptionAux(num_classes=10)
self.aux2 = InceptionAux(num_classes=10)
else:
self.aux1 = None
self.aux2 = None
def call(self, x):
x = self.conv1(x)
x = self.pool1(x)
x = self.conv2(x)
x = self.conv3(x)
x = self.pool2(x)
x = self.inception_3a(x)
x = self.inception_3b(x)
x = self.pool3(x)
x = self.inception_4a(x)
if self.aux:
out1 = self.aux1(x)
x = self.inception_4b(x)
x = self.inception_4c(x)
x = self.inception_4d(x)
if self.aux:
out2 = self.aux2(x)
x = self.inception_4e(x)
x = self.pool4(x)
x = self.inception_5a(x)
x = self.inception_5b(x)
x = self.pool5(x)
x = self.dropout(x)
x = self.fc(x)
if self.aux:
return x, out2, out1
else:
return x
モデルの構造を確認します。
model = GoogleNet(aux=True)
model.build((None, 224, 224, 3)) # build with input shape.
dummy_input = Input(shape=(224, 224, 3)) # declare without batch demension.
model_summary = Model(inputs=[dummy_input], outputs=model.call(dummy_input))
model_summary.summary()

学習の設定をします。
3つの出力に対してそれぞれ損失関数を指定し、重みも設定します。
epochs = 25
initial_lrate = 0.01
def decay(epoch, steps=100):
initial_lrate = 0.01
drop = 0.96
epochs_drop = 8
lrate = initial_lrate * math.pow(drop, math.floor((1+epoch)/epochs_drop))
return lrate
sgd = SGD(lr=initial_lrate, momentum=0.9, nesterov=False)
lr_sc = LearningRateScheduler(decay, verbose=1)
model.compile(loss=['categorical_crossentropy', 'categorical_crossentropy', 'categorical_crossentropy'], loss_weights=[1, 0.3, 0.3], optimizer=sgd, metrics=['accuracy'])
学習時は3つの出力が出てきます。
それぞれにデータを指定します。
history = model.fit(x_train, [y_train, y_train, y_train], validation_data=(x_test, [y_test, y_test, y_test]), epochs=epochs, batch_size=64, callbacks=[lr_sc])
pytorch
pytorchでもほぼ同様の実装となります。
import torch
import torch.nn as nn
import torch.optim as optim
from torchsummary import summary
import pytorch_lightning as pl
from torchmetrics import Accuracy as accuracy
畳み込み層の実装
class conv_bn_relu(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size=1, stride=1, padding=0):
super(conv_bn_relu, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=kernel_size, stride=stride, padding=padding)
self.bn = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(True)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.relu(x)
return x
InceptionAuxの実装
class InceptionAux(nn.Module):
def __init__(self, in_channels=512, num_classes=10):
super(InceptionAux, self).__init__()
self.pool = nn.AvgPool2d(kernel_size = (5,5), stride = 3, padding=0)
self.conv = conv_bn_relu(in_channels=in_channels, out_channels=128, kernel_size=1, stride=1,padding=0)
self.fc1 = nn.Linear(128*4*4,1024)
self.fc2 = nn.Linear(1024, 10)
self.relu = nn.ReLU(True)
self.dropout = nn.Dropout(0.7)
def forward(self, x):
x = self.pool(x)
x = self.conv(x)
x = x.view(x.shape[0], -1)
x = self.fc1(x)
x = self.relu(x)
x = self.dropout(x)
x = self.fc2(x)
return x
Inceptionの実装
class Inception(nn.Module):
def __init__(self, in_channels, ch1x1, ch3x3red, ch3x3, ch5x5red, ch5x5, pool_proj):
super(Inception, self).__init__()
self.brabch1 = conv_bn_relu(in_channels=in_channels, out_channels=ch1x1, kernel_size=1, stride=1)
self.branch2 = nn.Sequential(*[conv_bn_relu(in_channels=in_channels, out_channels=ch3x3red, kernel_size=1, stride=1,padding=0),
conv_bn_relu(in_channels=ch3x3red, out_channels=ch3x3, kernel_size=3, stride=1,padding=1)])
self.branch3 = nn.Sequential(*[conv_bn_relu(in_channels=in_channels, out_channels=ch5x5red, kernel_size=1, stride=1,padding=0),
conv_bn_relu(in_channels=ch5x5red, out_channels=ch5x5, kernel_size=5, stride=1,padding=2)])
self.branch4 = nn.Sequential(*[nn.MaxPool2d(kernel_size=3, stride=1, padding=1),
conv_bn_relu(in_channels=in_channels, out_channels=pool_proj, kernel_size=1, stride=1)])
def forward(self, x):
brabch1 = self.brabch1(x)
brabch2 = self.branch2(x)
brabch3 = self.branch3(x)
brabch4 = self.branch4(x)
out = torch.cat([brabch1, brabch2, brabch3, brabch4], axis = 1)
return out
GoogleNet本体の実装
class GoogleNet(nn.Module):
def __init__(self, aux=True):
super(GoogleNet, self).__init__()
self.aux = aux
self.conv1 = conv_bn_relu(in_channels=3, out_channels=64, kernel_size=7, stride=2, padding=3)
self.pool1 = nn.MaxPool2d(kernel_size=3, stride=2, ceil_mode=True)
self.conv2 = conv_bn_relu(in_channels=64, out_channels=64, kernel_size=3, stride=1, padding=1)
self.conv3 = conv_bn_relu(in_channels=64, out_channels=192, kernel_size=3, stride=1, padding=1)
self.pool2 = nn.MaxPool2d(kernel_size=3, stride=2, ceil_mode=True)
self.inception_3a = Inception(192, 64, 96, 128, 16, 32, 32)
self.inception_3b = Inception(256, 128, 128, 192, 32, 96, 64)
self.pool3 = nn.MaxPool2d(kernel_size=3, stride=2, ceil_mode=True)
self.inception_4a = Inception(480, 192, 96, 208, 16, 48, 64)
self.inception_4b = Inception(512, 160, 112, 224, 24, 64, 64)
self.inception_4c = Inception(512, 128, 128, 256, 24, 64, 64)
self.inception_4d = Inception(512, 112, 144, 288, 32, 64, 64)
self.inception_4e = Inception(528, 256, 160, 320, 32, 128, 128)
self.pool4 = nn.MaxPool2d(kernel_size=3, stride=2, ceil_mode=True)
self.inception_5a = Inception(832, 256, 160, 320, 32, 128, 128)
self.inception_5b = Inception(832, 384, 192, 384, 48, 128, 128)
self.pool5 = nn.AdaptiveAvgPool2d((1,1))
self.dropout = nn.Dropout(0.4)
self.fc = nn.Linear(1024, 10)
if aux:
self.aux1 = InceptionAux(512, num_classes=10)
self.aux2 = InceptionAux(528, num_classes=10)
else:
self.aux1 = None
self.aux2 = None
def forward(self, x, training=False):
x = self.conv1(x)
x = self.pool1(x)
x = self.conv2(x)
x = self.conv3(x)
x = self.pool2(x)
x = self.inception_3a(x)
x = self.inception_3b(x)
x = self.pool3(x)
x = self.inception_4a(x)
if self.aux:
out1 = self.aux1(x)
x = self.inception_4b(x)
x = self.inception_4c(x)
x = self.inception_4d(x)
if self.aux:
out2 = self.aux2(x)
x = self.inception_4e(x)
x = self.pool4(x)
x = self.inception_5a(x)
x = self.inception_5b(x)
x = self.pool5(x)
x = x.view(x.shape[0], -1)
x = self.dropout(x)
x = self.fc(x)
if training:
return x, out2, out1
else:
return x
構造の確認
from torchsummary import summary
summary(GoogleNet(), (3,224,224))

学習の際は3つの出力それぞれの損失を計算し、重みをつけて足し合わせます。
class GoogleNetTrainer(pl.LightningModule):
def __init__(self):
super().__init__()
self.model = GoogleNet()
def forward(self, x, training=False):
x = self.model(x, training=training)
return x
def training_step(self, batch, batch_idx):
x, y = batch
#x, y = x.to(device), y.to(device)
y_hat, y_aux2, y_aux1 = self.forward(x, training=True)
loss = nn.CrossEntropyLoss()(y_hat, y)+0.3*nn.CrossEntropyLoss()(y_aux2, y)+0.3*nn.CrossEntropyLoss()(y_aux1, y)
return {'loss': loss, 'y_hat':y_hat, 'y':y, 'batch_loss': loss.item()*x.size(0)}
def validation_step(self, batch, batch_idx):
x, y = batch
#x, y = x.to(device), y.to(device)
y_hat, y_aux2, y_aux1 = self.forward(x, training=True)
loss = nn.CrossEntropyLoss()(y_hat, y)+0.3*nn.CrossEntropyLoss()(y_aux2, y)+0.3*nn.CrossEntropyLoss()(y_aux1, y)
return {'y_hat':y_hat, 'y':y, 'batch_loss': loss.item()*x.size(0)}
def test_step(self, batch, batch_nb):
x, y = batch
#x, y = x.to(device), y.to(device)
y_hat = self.forward(x)
loss = nn.CrossEntropyLoss()(y_hat, y)
y_label = torch.argmax(y_hat, dim=1)
acc = accuracy()(y_label, y)
return {'test_loss': loss, 'test_acc': acc}
def training_epoch_end(self, train_step_output):
y_hat = torch.cat([val['y_hat'] for val in train_step_outputs], dim=0)
y = torch.cat([val['y'] for val in train_step_outputs], dim=0)
epoch_loss = sum([val['batch_loss'] for val in train_step_outputs]) / y_hat.size(0)
preds = torch.argmax(y_hat, dim=1)
acc = accuracy()(preds, y)
self.log('train_loss', epoch_loss, prog_bar=True, on_epoch=True)
self.log('train_acc', acc, prog_bar=True, on_epoch=True)
print('---------- Current Epoch {} ----------'.format(self.current_epoch + 1))
print('train Loss: {:.4f} train Acc: {:.4f}'.format(epoch_loass, acc))
def validation_epoch_end(self, val_step_outputs):
y_hat = torch.cat([val['y_hat'] for val in val_step_outputs], dim=0)
y = torch.cat([val['y'] for val in val_step_outputs], dim=0)
epoch_loss = sum([val['batch_loss'] for val in val_step_outputs]) / y_hat.size(0)
preds = torch.argmax(y_hat, dim=1)
acc = accuracy()(preds, y)
self.log('val_loss', epoch_loss, prog_bar=True, on_epoch=True)
self.log('val_acc', acc, prog_bar=True, on_epoch=True)
print('valid Loss: {:.4f} valid Acc: {:.4f}'.format(epoch_loss, acc))
# New: テストデータに対するエポックごとの処理
def test_epoch_end(self, test_step_outputs):
y_hat = torch.cat([val['y_hat'] for val in test_step_outputs], dim=0)
y = torch.cat([val['y'] for val in test_step_outputs], dim=0)
epoch_loss = sum([val['batch_loss'] for val in test_step_outputs]) / y_hat.size(0)
preds = torch.argmax(y_hat, dim=1)
acc = accuracy()(preds, y)
self.log('test_loss', epoch_loss, prog_bar=True, on_epoch=True)
self.log('test_acc', acc, prog_bar=True, on_epoch=True)
print('test Loss: {:.4f} test Acc: {:.4f}'.format(epoch_loss, acc))
def configure_optimizers(self):
optimizer = optim.SGD(self.parameters(), lr=0.01, momentum=0.9)
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=8, gamma=0.04)
return {'optimizer': optimizer, 'lr_scheduler': scheduler}
学習の実行はしません。
かなりいい加減な実装ですので、あまり参考にならないと思います。