ResNeXtについて構造の説明と実装のメモ書きです。
ただし、論文すべてを見るわけでなく構造のところを中心に見ていきます。
あまり正確に実装されていませんので、ご了承ください。
以下の論文について実装を行っていきます。
タイトル:Aggregated Residual Transformations for Deep Neural Networks
実装としてはResNetとほぼ同様です。
畳み込み処理を一部grouped convolutionに設定したものとなります。
ResNeXt
cardinary
$\boldsymbol{x}=[x_1,x_2,\cdots,x_D]$を$D$チャンネルのインプットとします。
以下のようなネットワークを考えます。入力をチャンネル方向に分割しそれぞれ変換を行い、それを足し合わせるというものです。
$$
F(\boldsymbol{x})=\sum_{i=1}^CT_i(\boldsymbol{x})
$$
$T_i(\boldsymbol{x})$は任意の関数です。
$C$は関数の数でCardinaryと呼びます。
今回は$T_i$はすべて同じ形式として、bottleneck構造を使います。
それぞれの$T_i$の最初の1×1の畳み込み層ではチャンネル数を減少させます。
出力$\boldsymbol{y}$は残差接続(Residual connection)を使って、
$$
\boldsymbol{y}=\boldsymbol{x}+\sum_{i=1}^CT_i(\boldsymbol{x})
$$
と書くことができます。
grouped convolution
これらの構造はgrouped convolutionを使って簡潔に表すことができます。
それを表したものが下の図です。

最初の1×1の畳み込み層は1つにまとめることができます。
そして複数のグループに分けて畳み込みを行い結合する操作は、grouped convolutionで同様の結果を得ることができます。
図の(c)はResNetなどで扱ってきた構造と同じ形になっています。
構造の詳細は以下のようになります。
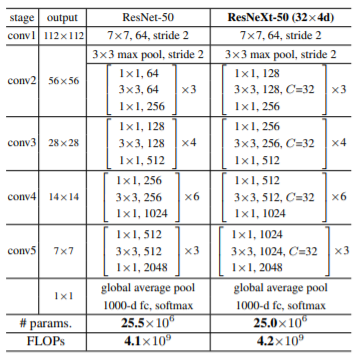
学習
学習はSGDを使用し、weight decayは0.0001でmomentumは0.9、学習率は0.1から始めて文献[11]通りに10で割っていきます。
実装
ResNeXt-50の実装を行います。
keras
import tensorflow.keras as keras
import tensorflow as tf
from tensorflow.keras.models import Sequential, Model
from tensorflow.keras.layers import Input, Conv2D, Activation, MaxPooling2D, AveragePooling2D, Flatten, Dense, Dropout, GlobalAveragePooling2D, BatchNormalization, Add
from keras.layers.merge import concatenate
from tensorflow.keras import backend as K
from tensorflow.keras.optimizers import SGD
from tensorflow.keras.callbacks import LearningRateScheduler
from keras.datasets import cifar10
import numpy as np
import cv2
class conv_bn_relu(Model):
def __init__(self, out_channels, kernel_size=1, strides=1, groups=1):
super(conv_bn_relu, self).__init__()
self.conv = Conv2D(out_channels, kernel_size=kernel_size, strides=strides, groups=groups, padding='same')
self.bn = BatchNormalization()
self.relu = Activation("relu")
def call(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.relu(x)
return x
ResNeXtブロックの実装をします。
ResNetとほぼかわりません。Conv2Dのblockを設定します。
class resnext_block(Model):
def __init__(self, out_channels, groups=1, block_num=0, layer_num=0):
super(resnext_block, self).__init__(name='block'+'_'+str(block_num)+'_'+str(layer_num))
block_name = '_'+str(block_num)+'_'+str(layer_num)
# shortcutとstrideの設定
if (layer_num == 0):
# 最初のresblockは(W、 H)は変更しないのでstrideは1にする
if (block_num==1):
stride = 1
else:
stride = 2
self.conv_sc = conv_bn_relu(out_channels, kernel_size=1, strides=stride, groups=1)
else:
stride = 1
mid_channels=out_channels/2
self.conv1 = conv_bn_relu(out_channels=mid_channels, kernel_size=1, strides=1, groups=groups)
self.conv2 = conv_bn_relu(out_channels=mid_channels, kernel_size=3, strides=stride, groups=32)
self.conv3 = conv_bn_relu(out_channels=out_channels, kernel_size=1, strides=1, groups=1)
self.add = Add(name='add'+block_name)
def call(self, x):
out = self.conv1(x)
out = self.conv2(out)
out = self.conv3(out)
if K.int_shape(x) != K.int_shape(out):
shortcut = self.conv_sc(x)
else:
shortcut = x
out = self.add([out, shortcut])
return out
ResNeXtの本体を実装します。
class ResNeXt(Model):
def __init__(self, layers, num_classes=10):
super().__init__()
self._layers = []
# 入力層
self._layers += [
conv_bn_relu(out_channels = 64, kernel_size = 7, strides = 2),
MaxPooling2D(pool_size=3, strides=2, padding='same')
]
# Residualブロック
for b in np.arange(len(layers)):
self._layers += [resnext_block(out_channels=256*(2**b), block_num=b+1, layer_num=i) for i in range(layers[b])]
# 出力層
self._layers += [
GlobalAveragePooling2D(name='pool_output'),
Dense(num_classes, activation='softmax', name='output')
]
def call(self, x):
for layer in self._layers:
x = layer(x)
return x
学習の設定を行います。
# 学習率を返す関数を用意する
def lr_schedul(epoch):
x = 0.1
if epoch >= 60:
x = 0.1*0.1
if epoch >= 120:
x = 0.1*(0.1**2)
if epoch >= 160:
x = 0.1*(0.1**3)
return x
lr_decay = LearningRateScheduler(
lr_schedul,
verbose=1,
)
model = ResNeXt(layers=[3,4,6,3])
sgd = SGD(lr=0.1, momentum=0.9, decay=1e-4, nesterov=False)
model.compile(loss=['categorical_crossentropy'], optimizer=sgd, metrics=['accuracy'])
model = ResNeXt(layers=[3,4,6,3])
model.build((None, 224, 224, 3)) # build with input shape.
dummy_input = Input(shape=(224, 224, 3)) # declare without batch demension.
model_summary = Model(inputs=[dummy_input], outputs=model.call(dummy_input))
model_summary.summary()
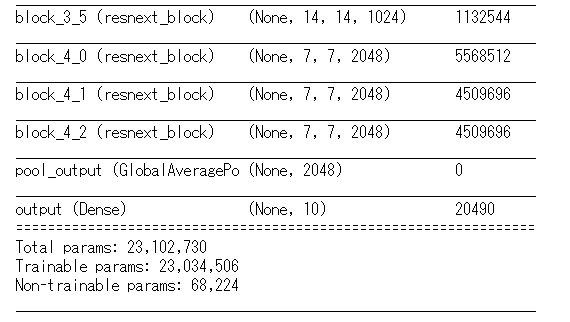
パラメータ数も論文のものとだいたい同じになりました。
学習は実行しません。
pytorch
import torch
import torch.nn as nn
import torch.optim as optim
import pytorch_lightning as pl
from torchmetrics import Accuracy as accuracy
class conv_bn_relu(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size=1, strides=1, groups=1):
super(conv_bn_relu, self).__init__()
pad = int((kernel_size-1)/2)
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=kernel_size, stride=strides, groups=groups, padding=pad)
self.bn = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=False)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.relu(x)
return x
ResNeXtブロックの実装はkerasとほぼ変わりません。
class resnext_block(nn.Module):
def __init__(self, out_channels, groups=1, block_num=0, layer_num=0):
super(resnext_block, self).__init__()
# shortcutとstrideの設定
if (layer_num == 0):
self._is_change = True
# 最初のresblockは(W、 H)は変更しないのでstrideは1にする
if (block_num==1):
stride = 1
in_channels = 64
else:
stride = 2
in_channels = int(out_channels//2)
self.conv_sc = conv_bn_relu(in_channels, out_channels, kernel_size=1, strides=stride)
else:
self._is_change = False
stride = 1
in_channels = out_channels
mid_channels=int(out_channels/2)
self.conv1 = conv_bn_relu(in_channels=in_channels, out_channels=mid_channels, kernel_size=1, strides=1, groups=1)
self.conv2 = conv_bn_relu(in_channels=mid_channels, out_channels=mid_channels, kernel_size=3, strides=stride, groups=groups)
self.conv3 = conv_bn_relu(in_channels=mid_channels, out_channels=out_channels, kernel_size=1, strides=1, groups=1)
def forward(self, x):
shortcut = x
out = self.conv1(x)
out = self.conv2(out)
out = self.conv3(out)
if self._is_change:
shortcut = self.conv_sc(shortcut)
out += shortcut
return out
本体の実装を行います。
class ResNeXt(nn.Module):
def __init__(self, layer_nums, groups, num_classes=10):
super(ResNeXt, self).__init__()
self.conv1 = nn.Sequential(*[conv_bn_relu(in_channels=3, out_channels=64, kernel_size=7, strides=2, groups=1),
nn.MaxPool2d(kernel_size=3, stride=2,padding=1)])
layers = []
for b in range(len(layer_nums)):
layers += [resnext_block(out_channels=256*(2**b), groups=groups, block_num=b+1, layer_num=i) for i in range(layer_nums[b])]
self.resnext = nn.Sequential(*layers)
self.fc = nn.Sequential(*[nn.AdaptiveAvgPool2d((1,1))])
self.linear = nn.Linear(in_features=2048, out_features=num_classes)
def forward(self, x):
out = self.conv1(x)
out = self.resnext(out)
out = self.fc(out)
out = out.view(out.shape[0], -1)
out = self.linear(out)
return out
構造の確認をします。
from torchsummary import summary
summary(ResNeXt(layer_nums=[3,4,6,3], groups=32), (3,224,224))

学習の設定をして実装を終わります。
class ResNeXtTrainer(pl.LightningModule):
def __init__(self):
super().__init__()
self.model = ResNeXt(layer_nums=[3,4,6,3], groups=32)
def forward(self, x):
x = self.model(x)
return x
def training_step(self, batch, batch_idx):
x, y = batch
#x, y = x.to(device), y.to(device)
y_hat = self.forward(x)
loss = nn.CrossEntropyLoss()(y_hat, y)
return {'loss': loss, 'y_hat':y_hat, 'y':y, 'batch_loss': loss.item()*x.size(0)}
def validation_step(self, batch, batch_idx):
x, y = batch
#x, y = x.to(device), y.to(device)
y_hat = self.forward(x)
loss = nn.CrossEntropyLoss()(y_hat, y)
return {'y_hat':y_hat, 'y':y, 'batch_loss': loss.item()*x.size(0)}
def test_step(self, batch, batch_nb):
x, y = batch
#x, y = x.to(device), y.to(device)
y_hat = self.forward(x)
loss = nn.CrossEntropyLoss()(y_hat, y)
y_label = torch.argmax(y_hat, dim=1)
acc = accuracy()(y_label, y)
return {'test_loss': loss, 'test_acc': acc}
def training_epoch_end(self, train_step_output):
y_hat = torch.cat([val['y_hat'] for val in train_step_outputs], dim=0)
y = torch.cat([val['y'] for val in train_step_outputs], dim=0)
epoch_loss = sum([val['batch_loss'] for val in train_step_outputs]) / y_hat.size(0)
preds = torch.argmax(y_hat, dim=1)
acc = accuracy()(preds, y)
self.log('train_loss', epoch_loss, prog_bar=True, on_epoch=True)
self.log('train_acc', acc, prog_bar=True, on_epoch=True)
print('---------- Current Epoch {} ----------'.format(self.current_epoch + 1))
print('train Loss: {:.4f} train Acc: {:.4f}'.format(epoch_loass, acc))
def validation_epoch_end(self, val_step_outputs):
y_hat = torch.cat([val['y_hat'] for val in val_step_outputs], dim=0)
y = torch.cat([val['y'] for val in val_step_outputs], dim=0)
epoch_loss = sum([val['batch_loss'] for val in val_step_outputs]) / y_hat.size(0)
preds = torch.argmax(y_hat, dim=1)
acc = accuracy()(preds, y)
self.log('val_loss', epoch_loss, prog_bar=True, on_epoch=True)
self.log('val_acc', acc, prog_bar=True, on_epoch=True)
print('valid Loss: {:.4f} valid Acc: {:.4f}'.format(epoch_loss, acc))
# New: テストデータに対するエポックごとの処理
def test_epoch_end(self, test_step_outputs):
y_hat = torch.cat([val['y_hat'] for val in test_step_outputs], dim=0)
y = torch.cat([val['y'] for val in test_step_outputs], dim=0)
epoch_loss = sum([val['batch_loss'] for val in test_step_outputs]) / y_hat.size(0)
preds = torch.argmax(y_hat, dim=1)
acc = accuracy()(preds, y)
self.log('test_loss', epoch_loss, prog_bar=True, on_epoch=True)
self.log('test_acc', acc, prog_bar=True, on_epoch=True)
print('test Loss: {:.4f} test Acc: {:.4f}'.format(epoch_loss, acc))
def configure_optimizers(self):
optimizer = optim.SGD(self.parameters(), lr=0.1, momentum=0.9, weight_decay=1e-4)
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=20, gamma=0.1)
return {'optimizer': optimizer, 'lr_scheduler': scheduler}
ここまで見ていただいた方、
いい加減なまとめと実装で申し訳ありません。