内容
- グラフラプラシアンの固有値をプロットした
- 例題のグラフラプラシアンに対応したグラフを参考に、最も簡単な合意形成を考えてみる
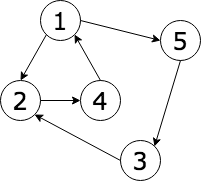
例題状況のグラフ
- 隣接行列 $A$ を図示すると以下の系が得られる
概要
- ノード数が5つなので、状態変数5つをベクトル化し $x = (x_1, x_2, x_3, x_4, x_5)$ と表す
- 状態変数 $x_i$ の時間変化は、自身の値と制御器(コントローラ)の入力を関数 $f$ によって処理した結果決定されると仮定する
- $\frac{dx_i(t)}{dt} = f_i(x_i(t), u_i(t))$
- 制御器 $u_i$ は、自分自身の状態変数値 $x_i$ と、自分の近傍の状態変数値によって決定される関数とする
- 例えば $u_1(t) = c(x_1(t), x_4(t))$
- 時刻 $t$ におけるノード1への制御信号は、自分の状態値 $x_1$ と $A$ で規定される近傍からの状態値 $x_4$ によって決定する
- 例えば $u_1(t) = c(x_1(t), x_4(t))$
- 合意形成
- 制御器により$\lim_{t\to\infty} x_i(t) = \alpha$となる合意値$\alpha$を達成すること
- 例えば $\alpha=\frac{1}{N} \sum_{i} x_{0i}$ であるとき、平均値合意である
グラフラプラシアンで表現される系
-
具体的なシステム $f, c$ について、以下の積分系を仮定する
- $x_i(0) = x_{0i}$
- $\frac{dx_i(t)}{dt} = u_i(t)$
- $u_i(t) = -\sum_{j\in\mathcal{N}i} x_i(t) - x_j(t) $
- i番目のノードの近傍$N_j$中のノードjに対する状態変数値の差分が制御信号として入力される
-
行列 $A$ とグラフラプラシアンを思い出す
-
上の積分系は $\frac{dx(t)}{dt} = -Lx(t)$ という行列形式で表される。
計算例
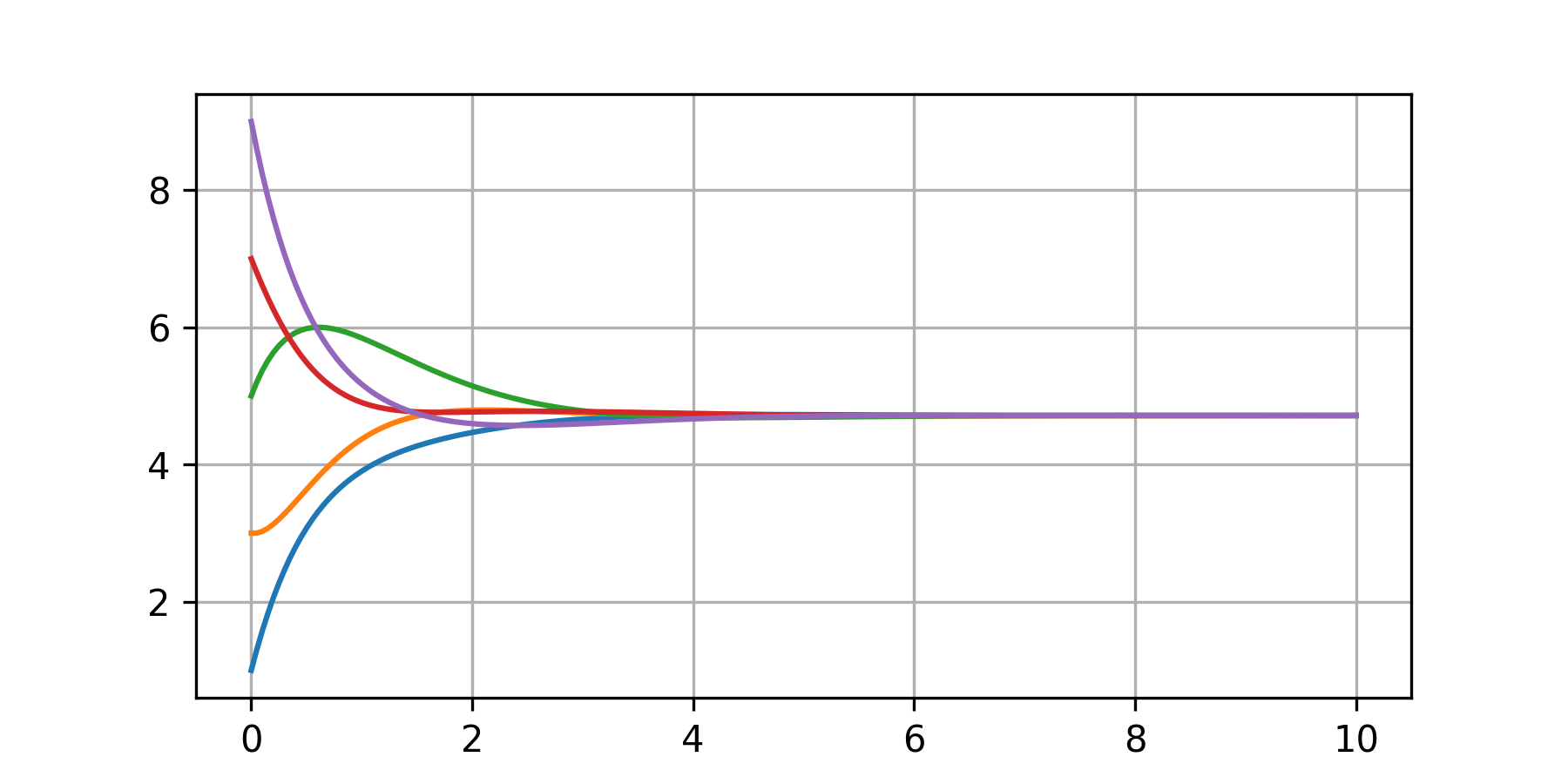
- 初期値として $x(t) = (1, 3, 5, 7, 9)$ を与える
- この系が合意を達成することを確認する
- 実行結果
- 4.712程度の値に収束する(合意が形成される)
コード
using PyPlot
# 初期値
x = [1, 3, 5, 7, 9]
# グラフラプラシアンL
A = [0 0 0 1 0;
1 0 1 0 0;
0 0 0 0 1;
0 1 0 0 0;
1 0 0 0 0]
D = diagm(squeeze(sum(A, 2), 2))
Δ = maximum(D)
L = D - A
# シミュレーション
Δt = 0.05
tf = 10
xx = []
for t in 0:Δt:tf
push!(xx, x)
Δx = -L*x
x += Δx * Δt
print(x)
end
# plot
t = 0:Δt:tf
figure(figsize=(6, 3))
plot(t, xx)
grid(true)
savefig("ex3.png", format="png", dpi=300)