はじめに
- 本記事は、Ardupilotに含まれている算術演算ライブラリ(AP_Math)に含まれている関数の作用についての覚書です。
- 関数の説明は随時更新したいと思います。
rotate関数
- rotate関数は__ジャイロセンサーの取付方向__ を__機体のRoll,Pitch,Yaw方向__ に合わせるために使用しているようです。
- Vector3型のメンバ変数__X,Y,Zの3つの入れ替え__ 処理を行います。
- 引数である enum Rotation により入れ替えのバリエーションを指定します。
- 関数は↓のように定義されています。
template <typename T>
void Vector3<T>::rotate(enum Rotation rotation){
//処理記述(省略)
}
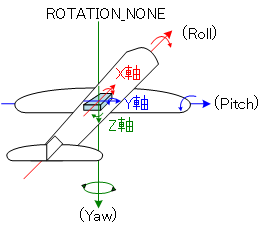
ローテーションなし(引数が__ROTATION_NONE__)の場合
- 機体ロール軸=ジャイロセンサのX軸
- 機体ピッチ軸=ジャイロセンサのY軸
- 機体ヨー軸=ジャイロセンサのZ軸
となり、"X,Y,Zの入れ替えは無し" となります。
ヨー方向に90°(引数がROTATION_YAW_90)の場合
図のようにジャイロセンサを ヨー方向に90度回転して取り付けた状態だとします。
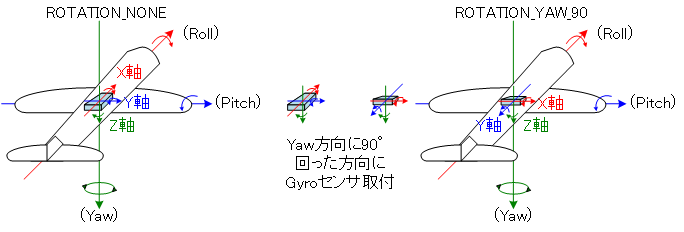
これを X=ロール、Y=ピッチ、Z=ヨー であるかのようにXYZを入れ変える処理が入ります。
**回転後X(機体ロール) = ジャイロYの逆回転(符号が反転)
**回転後Y(機体ピッチ) = ジャイロX
**回転後Z(機体ヨー ) = ジャイロZ
となります。
該当部分のソースコードは↓の様に記述されています。
switch (rotation) {
//--省略--
case ROTATION_YAW_90: {
tmp = x;
x = -y;
y = tmp;
return;
}
//--省略--
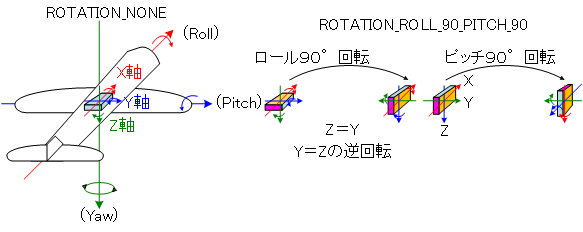
ロール90度回転後ピッチ90°度回転(引数がROTATION_ROLL_90_PITCH_90)の場合
先にソース参照します。 先にロール90度回転したのちにピッチ90度回転するような記述になっています
- 回転後Z(機体ヨー)=ジャイロY
- 回転後Y(機体ピッチ)=ジャイロZの逆回転
その後
- 回転後Z(機体ヨー)=回転前Xの逆回転
- 回転後X(機体ロール)=回転前Z
となります
case ROTATION_ROLL_90_PITCH_90: {
tmp = z;
z = y;
y = -tmp;
tmp = z;
z = -x;
x = tmp;
return;
}
図で書くとこんな感じです。
- その他の回転も同じ要領でコーディングされていますので、説明は割愛します。