はじめに
会社の方からデバッグの方法を教えてもらったときのメモ。
走り書きなので間違ってたらすいません。
roslaunchをdebugで実行する
準備
・rosの拡張を入れる。
・実行ファイルをdebugオプションでビルド。特にcatkin build を使う必要はない。
$ catkin build [package] --cmake-args -DCMAKE_BUILD_TYPE=Debug
launch.jsonの生成
・launch.json(vscode上で F5 を押すと実行されるファイル)のROS拡張があるので、それを利用します。 ctrl + shift + p でlaunchって調べるとlaunch.jsonが出てくるので開く。

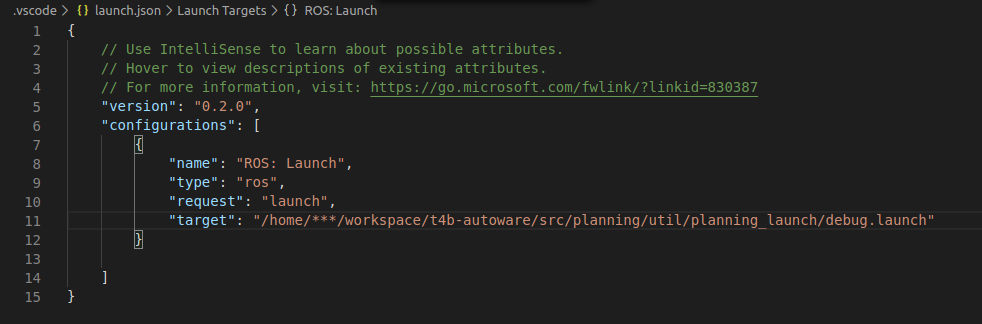
・launch.jsonの右下の Add Configuration を押すと基本構成がリストで出てくるので、ROS: Launch を選択

・targetのタグに実行したいlaunchファイルのパスを書き込む
起動
・launch.jsonを開いてF5を押すと起動
解析
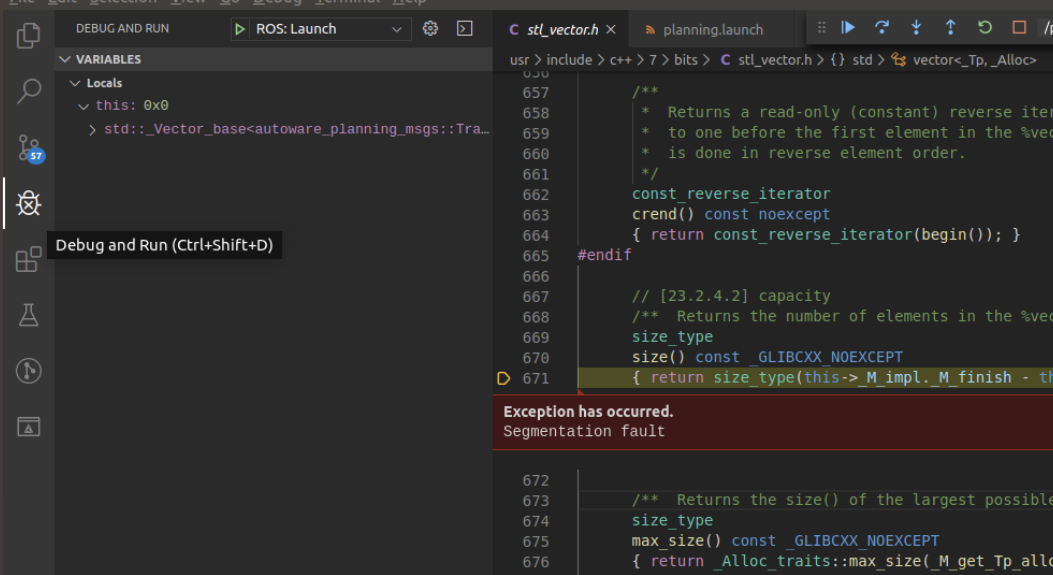
・exceptionとかがあると自動で止まってくれる。これはthisがnulptrだったとき。

・左端のデバッガを押すと色々見える
・ブレイクポイントも貼れる
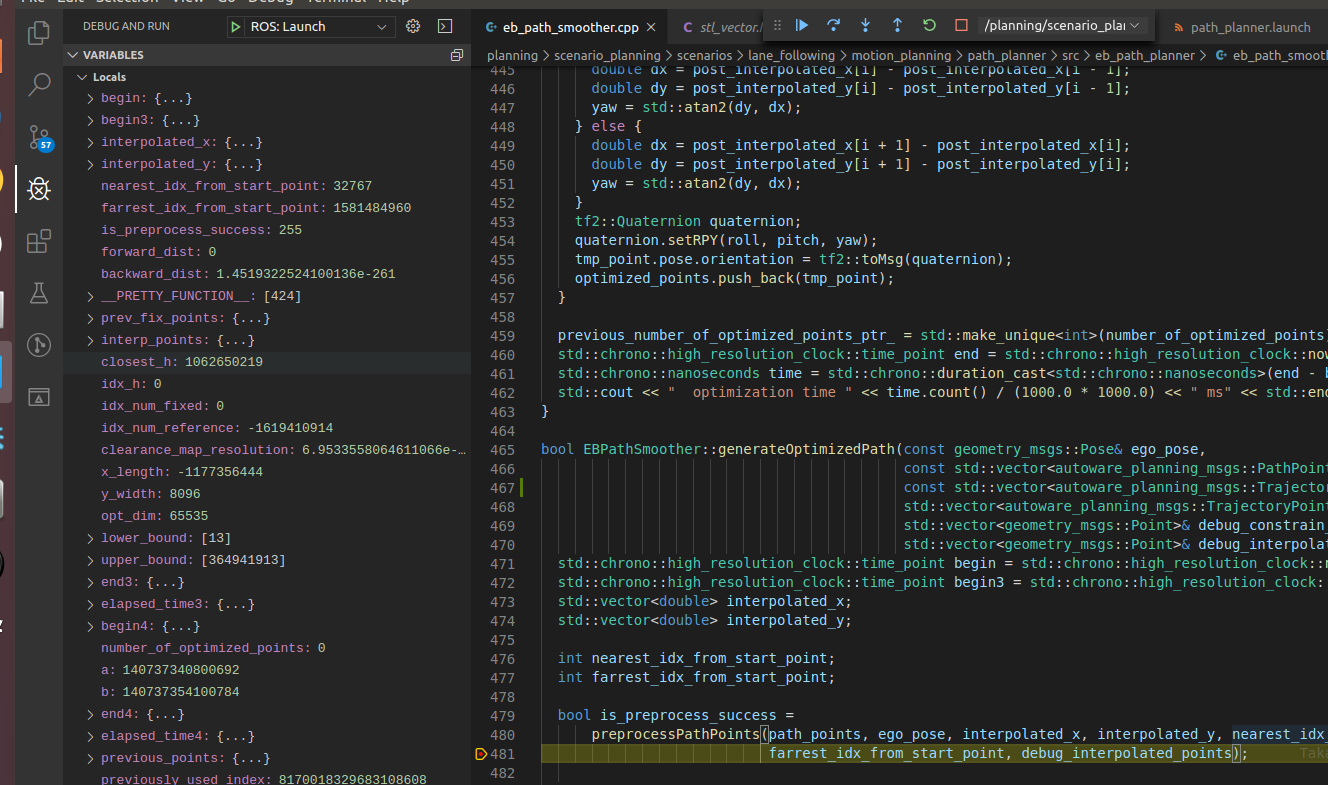
・変数にカーソルを合わせると中身が見える
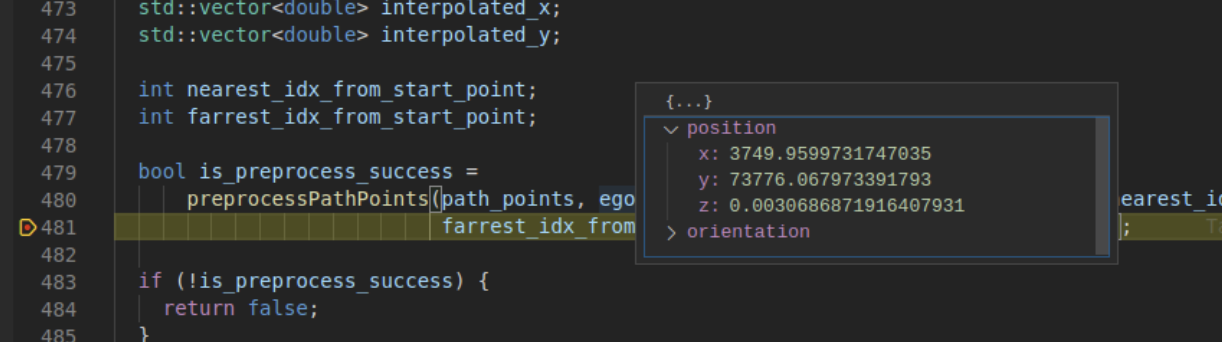
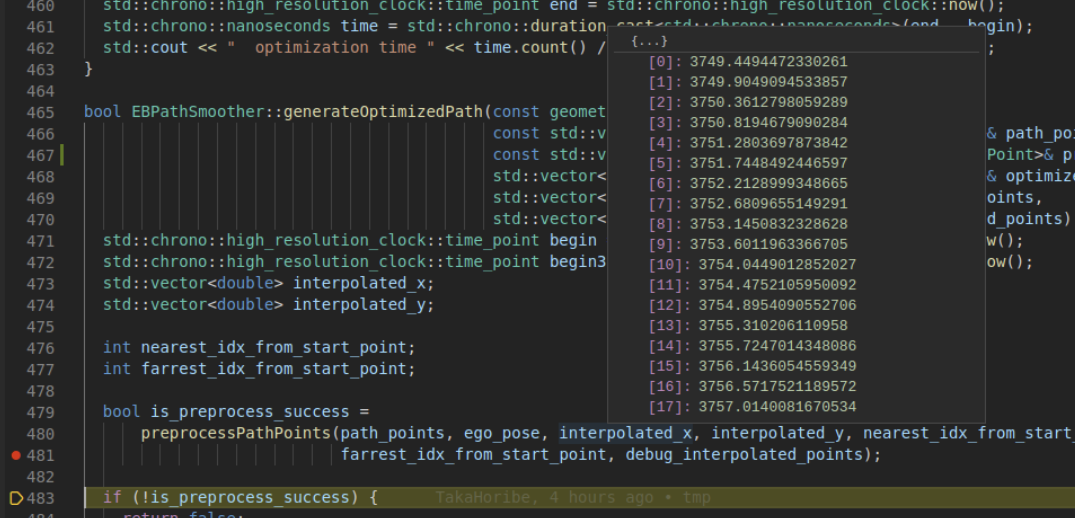
・デフォルトだとvectorとかは中身が見えない。

・ので、vscodeの DEBUG CONSOLE で以下のコマンドを打つ
-exec -enable-pretty-printing
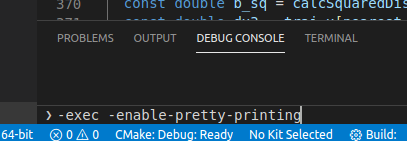
すると見える。
・Exceptionのときのcall stackは左下のところに書き出される。
