制御工学の問題で以下のように出題されたため,sympyによって数値計算させたので備忘録として記録します.(課題内容と数値を変更しています)
問1)
以下の伝達関数のBode線図をかけ.
$$G(s) = \frac{10}{s(s+4)(3s+1)} $$
from sympy import *
def main():
x = Symbol("x") # symbolとして使う変数の宣言
y = Symbol("y")
f = x* (x+4) *(3*x+1) # 関数f(x)の定義
f1 = expand(f) # 関数f(x)を展開
f2 = factor(f1) # 関数f(x)を因数分解
print("f = "+str(f)) # 計算結果の表示
print("f1 = "+str(f1))
print("f2 = "+str(f2))
if __name__ == '__main__':
main()
f = x*(x + 4)(3x + 1)
f1 = 3x**3 + 13x**2 + 4x
f2 = x(x + 4)(3x + 1)
が出力されます.(ただの展開なので頭で計算しても問題ありません.)これより以下のパラメータに係数を入れていきます.
from control.matlab import *
from matplotlib import pyplot as plt
# 伝達関数のパラメータ
num = [ 10] # 分子の係数
den = [3, 13, 4,0] # 分母の係数
sys = tf(num, den) # 伝達関数モデルの作成
bode(sys) # ボード線図のプロット
plt.show()
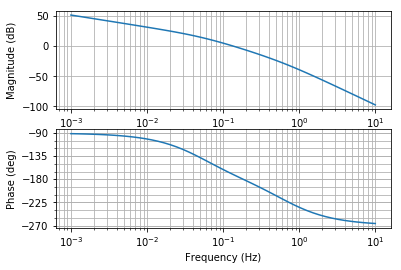
ボード線図が出力されました.
問2)
以下の系を制御する場合のシステムの時間応答を求めよ.
\frac{dx(t)}{dt} = \begin{pmatrix}
0 & 1 \\
-4 & -5\\
\end{pmatrix}x(t) + \begin{pmatrix} 0 \\ 1 \\
\end{pmatrix}u(t) \\
x(0) = \begin{pmatrix} 1 \\ 0 \\ \end{pmatrix}, u(t) = Heaviside(t)
from control.matlab import *
from matplotlib import pyplot as plt
import sympy as sym
import numpy as np
def main():
var("a:z")
var("A:Z")
var("X0")
A = [[0,1], [-4,-5]]
B = [[0], [1]]
X0 = [[1],[0]]
A = sym.Matrix(A)
X = (sym.eye(2)*s - A).inv()
Y = inverse_laplace_transform(X,s,t) #exp(At)
X0 = sym.Matrix(X0)#これはx0
#print(Y *X0 )#第一項
#積分の項を計算していく
var("tau")#積分のためのtau
Z = inverse_laplace_transform(X,s,t-tau)#再度計算
B = sym.Matrix(B)#b
W = integrate(Z * B ,(tau,0,t))#積分 eAt * b * u(t)
#print(W)
Answer = Y * X0 + W
print(sym.simplify(Answer[0,0]))
print(sym.simplify(Answer[1,0]))
if __name__ == "__main__":
main()
Heaviside(t)/4 + exp(-t)Heaviside(t) - exp(-4t)*Heaviside(t)/4
-exp(-t)Heaviside(t) + exp(-4t)*Heaviside(t)
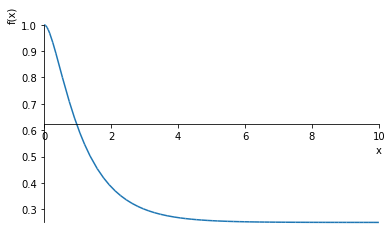
と出力されました.これより,$$ x(t)= [x_1(t),x_2(t)]$$とした場合,
$$x_1(t) = \frac{1}{4} + exp(-t) - \frac{exp(-4t)}{4}$$
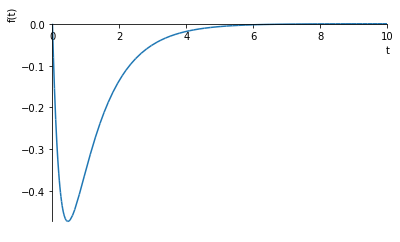
$$x_2(t) = -exp(-t) + exp(-4t)$$
これが解答となりますが,この関数を念のためプロットします.
import sympy as sym
var("t")
sym.plotting.plot((1/4 + exp(-t) - exp(-4*t)/4,(t,0,10)))
sym.plotting.plot(-exp(-t) + exp(-4*t),(t,0,10))
参考になった記事
https://algorithm.joho.info/seigyoriron/python-control-simulation/
https://qiita.com/nnn_anoken/items/ada16e29ef8282498bb7
+sympyでの数値計算に関する諸々の記事