やりたいこと
amd64のGPU付きノートPCで、Docker上でROS/ROS2を起動して、rvizやgazeboを動かしたい。
本体環境を保護して、別のマシンに環境をそのまま持っていくことが目的。
やり方が理解できないので、先人のやっていることを理解しながらのメモ。
やりたいことをもう少し細分化
- GPU付きのノートPCのDocker環境でROSを動かす
- GUDA10.2とOpenGLが動く
- GUIが画面に出力されるようにする
- ディレクトリをホストと共有したい
参考にしている情報
シンプルに書いてある。参考になりそう。
DockerでGUIアプリを実行する
OpenGLが動くDockerイメージ
nvidia/opengl
CUDAとOpenGLが動くDockerイメージ
nvidia/cudagl
やりたいことは、この方と同じこと。
ROSをdocker上で動かすサンプル.rvizなどのGUIアプリケーションも動作するはず.
ROS.org 公式の説明
Using GUI's with Docker
gazebo公式のインストールマニュアル
Install Gazebo using Ubuntu packages
個人的に常々参考にさせていただいている。ARMコア用
NVIDIA JetsonデバイスでROSを起動するDockerfile
gazeboバイナリを取得するDockerfileの書き方が大変参考になりそう
ROS / GAZEBOでのPriusのデモ
WEBブラウザ経由で試せるROS/ROS2環境。私も使ってます。
ROS/ROS2のGUIをWebブラウザ経由でお手軽に試せるDockerfileを公開しました
ROS2をDockerで動かす貴重なサンプル。
ROS2開発環境をDockerで構築する
すこし前の記事だけと、自分のやりたいことはほとんどこれ
DockerでGUIのアプリ動かすためのメモ
privileged オプションの詳細の参考
Docker privileged オプションについて
同じことをやっている人がいましたw
RealSense D435を使ってElasticFusion
JetsonでROS2でRealSense
Jetson Nano+ROS2上でのIntel RealSenseの動作と注意点
条件
CORE i7 GTX1660TiのノートPCで、ホストOSはUbuntu18.04
Docker19.xで実施する。
NVIDIA-dockerは使用しない。
試してみること
- GPUなしでGUIを起動し、FireFoxなど立ち上げてみる
- GPUなしでOpenGLアプリを起動する
- GPUありでGUIを起動し、FireFoxなど立ち上げてみる
- GPUありでOpenGLアプリを起動する
色々ためしてみる
ネット上のサンプルを元に、実施可能かどうかやってみることにします。
1.ROSをdocker上で動かすサンプル(NG)
まずはこちらを参考に、rvizが立ち上がるかやってみます。
ROSをdocker上で動かすサンプル.rvizなどのGUIアプリケーションも動作するはず.
$ docker build --tag shinsumicco/ros:kinetic-desktop-standard --file Dockerfile.kinetic.standard .
$ docker network create rosnet
ターミナルを2つ開いて実行
$ cd /path/to/docker-ros/
$ ./run.kinetic.standard --name roscore --net rosnet
# sudo chown -R $USER:$USER .
# roscore
... logging to /home/kuma/.ros/log/e940edd6-9dfa-11ea-ba03-0242ac120002/roslaunch-c2169f1a0bde-33.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://c2169f1a0bde:40163/
ros_comm version 1.12.14
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.14
NODES
auto-starting new master
process[master]: started with pid [43]
ROS_MASTER_URI=http://c2169f1a0bde:11311/
setting /run_id to e940edd6-9dfa-11ea-ba03-0242ac120002
process[rosout-1]: started with pid [56]
started core service [/rosout]
roscoreの実行で表示されるURLをターミナル2の起動引数にする。
$ ./run.kinetic.standard --name rviz --net rosnet --env ROS_HOSTNAME=rviz --env ROS_MASTER_URI=roscoreの起動URLを使う
# sudo chown -R $USER:$USER .
# rosrun rviz rviz
[ INFO] [1590351256.773212816]: rviz version 1.12.17
[ INFO] [1590351256.773241018]: compiled against Qt version 5.5.1
[ INFO] [1590351256.773249629]: compiled against OGRE version 1.9.0 (Ghadamon)
libGL error: No matching fbConfigs or visuals found
libGL error: failed to load driver: swrast
Could not initialize OpenGL for RasterGLSurface, reverting to RasterSurface.
libGL error: No matching fbConfigs or visuals found
libGL error: failed to load driver: swrast
Segmentation fault (core dumped)
OpenGLのライブラリのエラーが表示されて、異常終了してしまいました。
GPU付きのPCだとうまく行かないのかな?
もう片方のGPU用はNVIDIA-Dockerを使用するということでやめておくことにします。
2.X11ソケットをコンテナーと共有して直接使用する(OK)
こちらを試してみます。
FROM ubuntu:14.04
RUN apt-get update && apt-get install -y firefox
# Replace 1000 with your user / group id
RUN export uid=1000 gid=1000 && \
mkdir -p /home/developer && \
echo "developer:x:${uid}:${gid}:Developer,,,:/home/developer:/bin/bash" >> /etc/passwd && \
echo "developer:x:${uid}:" >> /etc/group && \
echo "developer ALL=(ALL) NOPASSWD: ALL" > /etc/sudoers.d/developer && \
chmod 0440 /etc/sudoers.d/developer && \
chown ${uid}:${gid} -R /home/developer
USER developer
ENV HOME /home/developer
CMD /usr/bin/firefox
Dockerfileをビルドして実行します。
$ docker build -t firefox .
$ docker run -ti --rm \
-e DISPLAY=$DISPLAY \
-v /tmp/.X11-unix:/tmp/.X11-unix \
firefox
これはあっさり動作しました。
X11の設定が妥当になされていれば、実施できるようです。
3.CUDAとOpenGLが動くコンテナを作り、画面に表示してみる
CUDA10.2+OpenGL(glvnd1.0) をpullしてみます。
タグはbase/runtime/develの3種類がありますが、どういう区分かわからないので、baseを選びます。(dockerhubに説明書いてほしい)
$ docker pull nvidia/cudagl:10.2-base-ubuntu18.04
$ docker run -it --rm -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=$DISPLAY --name glvnd nvidia/cudagl:10.2-base-ubuntu18.04
テストのため、Dockerコンテナの中で、xeyesをインストールして実行してみます。
# apt-get install x11-apps:i386
# xeyes
No protocol specified
Error: Can't open display: :0
あら?開かない。
X11でうまく行ったDockerfileをそのまま使う。
完全にそのままだと、「/bin/sh: 1: cannot create /etc/sudoers.d/openwrt: Directory nonexistent」が発生する。
sudoがインストールされていないので、sudoをインストールするように修正すると動作する。
FROM nvidia/cudagl:10.2-base-ubuntu18.04
RUN apt-get update && apt-get install -y firefox sudo
# Replace 1000 with your user / group id
RUN export uid=1000 gid=1000 && \
mkdir -p /home/developer && \
echo "developer:x:${uid}:${gid}:Developer,,,:/home/developer:/bin/bash" >> /etc/passwd && \
echo "developer:x:${uid}:" >> /etc/group && \
echo "developer ALL=(ALL) NOPASSWD: ALL" > /etc/sudoers.d/developer && \
chmod 0440 /etc/sudoers.d/developer && \
chown ${uid}:${gid} -R /home/developer
USER developer
ENV HOME /home/developer
CMD /usr/bin/firefox
実行はこちら
$ docker run -it --rm -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=$DISPLAY --name glvnd cuda_gui
これで、FirefoxはDockerのなかからGUIで表示されました。
CUDAのバージョンをnvidia-smiで確認してみる
FireFoxを立ち上げたときはGPUが有向になっていませんでした。
--gpus all を引数に追加してみます。
FireFoxの起動の代わりにbashを起動して挙動を試します。
$ docker run -it --gpus all --rm -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=$DISPLAY --name glvnd cuda_gui
$ nvidia-smi
Tue May 26 09:37:22 2020
+-----------------------------------------------------------------------------+
| NVIDIA-SMI 440.82 Driver Version: 440.82 CUDA Version: 10.2 |
|-------------------------------+----------------------+----------------------+
| GPU Name Persistence-M| Bus-Id Disp.A | Volatile Uncorr. ECC |
| Fan Temp Perf Pwr:Usage/Cap| Memory-Usage | GPU-Util Compute M. |
|===============================+======================+======================|
| 0 GeForce GTX 166... Off | 00000000:01:00.0 Off | N/A |
| N/A 45C P8 6W / N/A | 458MiB / 5944MiB | 5% Default |
+-------------------------------+----------------------+----------------------+
+-----------------------------------------------------------------------------+
| Processes: GPU Memory |
| GPU PID Type Process name Usage |
|=============================================================================|
+-----------------------------------------------------------------------------+
nvidia-smi を実行して、GPUが認識されていることが確認できました。
CUDA10.2もインストールされているようです。
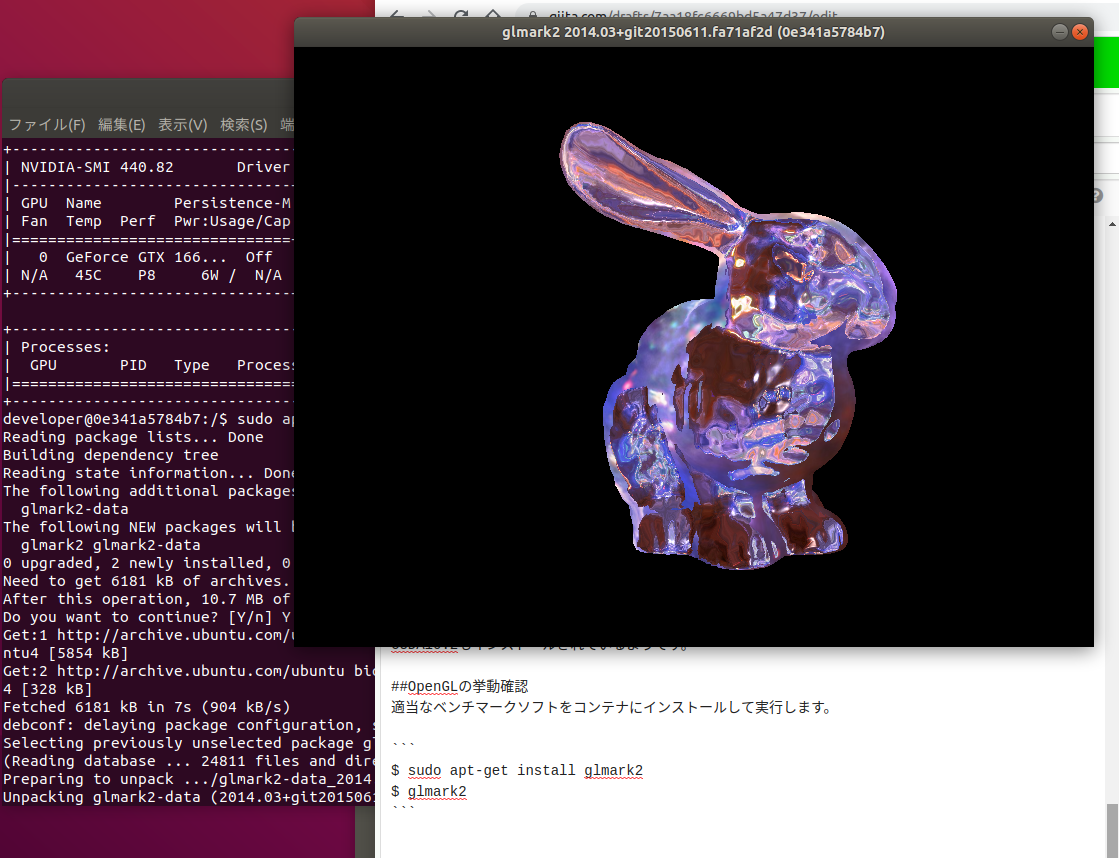
OpenGLのベンチマークソフトを実行させてみる
適当なベンチマークソフトをコンテナにインストールして実行します。
$ sudo apt-get install glmark2
$ glmark2
このように、デスクトップにGUIが表示されました。
ROS2とgazeboを追加してみる
gazeboとROS2が動くように、色々インストールしてみます。
その過程でわかったことのメモ
ENV DEBIAN_FRONTEND=noninteractive
インストールのときに入力を求められたら、デフォルトで動くようにする。
Dockerをビルドしているときに入力求められると止まってしまうので、これで対策。
apt-get install -yq
セットアップのオプションで、-yは問い合わせ[Y/n]にYで答えてインストールを継続するオプション。
-qは標準出力に表示を出さずにインストールを行う。
私が適当に打ち込んだDockerfileですが、gazeboは動作しました。
しかし、ROS2は呼び出せなかったので、何か設定をミスっているようです。
ROS2のセットアップをするDockerfileを書く
ROS2のイメージをそのまま使うのが一番近道ですが、Dockerfileの大本はcudaとOpenGLが動くものを使ってしまいましたので、そのイメージにROS2のセットアップを手動で追加します。
が、安直に組み入れると、ROS2は動くのに、gazeboが動かない状態に陥ってしまいました。
そこで、今度は確実に動くだろう組み合わせから攻めていこうと思います。
4.cuda10.2+OpenGL+gazeboのDockerfileをとりあえず作る
# GPUとGUIが使えるDockerfileをamd64で動かす
FROM nvidia/cudagl:10.2-base-ubuntu18.04
# これを入れないとtzdataで設定入力を求められて停止する
ENV DEBIAN_FRONTEND=noninteractive
RUN apt-get update && \
apt-get install -yq wget curl git build-essential vim sudo lsb-release locales bash-completion tzdata
# Replace 1000 with your user / group id
RUN export uid=1000 gid=1000 && \
mkdir -p /home/developer && \
echo "developer:x:${uid}:${gid}:Developer,,,:/home/developer:/bin/bash" >> /etc/passwd && \
echo "developer:x:${uid}:" >> /etc/group && \
echo "developer ALL=(ALL) NOPASSWD: ALL" > /etc/sudoers.d/developer && \
chmod 0440 /etc/sudoers.d/developer && \
chown ${uid}:${gid} -R /home/developer
RUN curl -sSL http://get.gazebosim.org | sh
USER developer
ENV HOME /home/developer
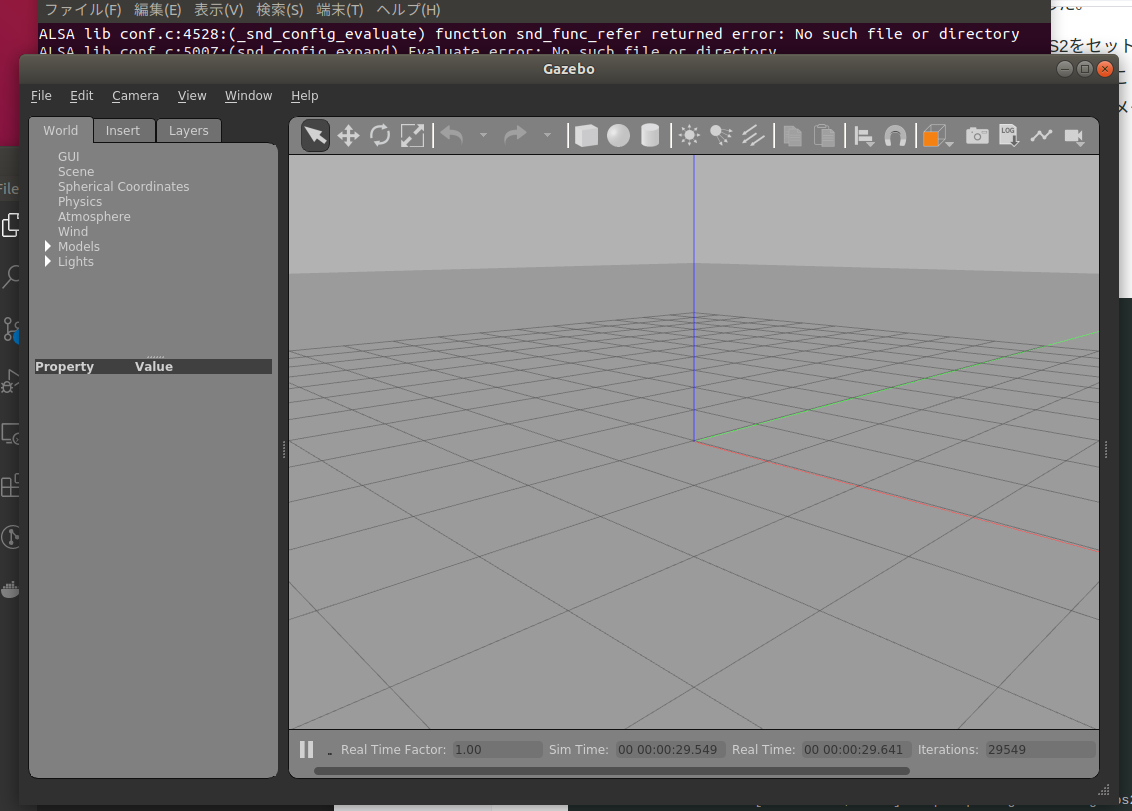
実行してみると、あっさりgazeboが動きます。
これにROS2をインストールしてみます。
5.cuda10.2+OpneGL+gazebo+ROS2
日本語環境もいれて、使いやすく動くようにしてみます。
# GPUとGUIが使えるDockerfileをamd64で動かす
FROM nvidia/cudagl:10.2-base-ubuntu18.04
# これを入れないとtzdataで設定入力を求められて停止する
ENV DEBIAN_FRONTEND=noninteractive
RUN apt-get update && \
apt-get install -yq wget curl git build-essential vim sudo lsb-release locales bash-completion tzdata
# Replace 1000 with your user / group id
RUN export uid=1000 gid=1000 && \
mkdir -p /home/developer && \
echo "developer:x:${uid}:${gid}:Developer,,,:/home/developer:/bin/bash" >> /etc/passwd && \
echo "developer:x:${uid}:" >> /etc/group && \
echo "developer ALL=(ALL) NOPASSWD: ALL" > /etc/sudoers.d/developer && \
chmod 0440 /etc/sudoers.d/developer && \
chown ${uid}:${gid} -R /home/developer
RUN curl -sSL http://get.gazebosim.org | sh
ENV ROS_DISTRO dashing
# ロケールのセットアップ
RUN apt-get update && apt-get install -y locales && \
dpkg-reconfigure locales && \
locale-gen ja_JP ja_JP.UTF-8 && \
update-locale LC_ALL=ja_JP.UTF-8 LANG=ja_JP.UTF-8
ENV LC_ALL ja_JP.UTF-8
ENV LANG ja_JP.UTF-8
ENV LANGUAGE ja_JP.UTF-8
# APTソースリストの設定
RUN apt-get update && \
apt-get install -y curl gnupg2 lsb-release && \
curl http://repo.ros2.org/repos.key | apt-key add - && \
sh -c 'echo "deb [arch=amd64,arm64] http://packages.ros.org/ros2/ubuntu \
`lsb_release -cs` main" > /etc/apt/sources.list.d/ros2-latest.list' && \
apt-get update
# ROS2パッケージのインストール
RUN export ROS_DISTRO=dashing && \
apt-get install -y ros-$ROS_DISTRO-desktop \
python3-colcon-common-extensions python3-rosdep python3-argcomplete && \
rosdep init && \
rosdep update
USER developer
ENV HOME /home/developer
## 環境設定
RUN echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
これをビルドして、実行します。
$ docker build -t cuda_gui .
$ docker run -it --gpus all --rm -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=$DISPLAY --name glvnd cuda_gui
コンソールで、gazebo,ros2ともに動きました。
rviz2を実行すると、こちらも動作します。
rviz2が動いたので、OpenGLも問題なく動いていると判断できます。
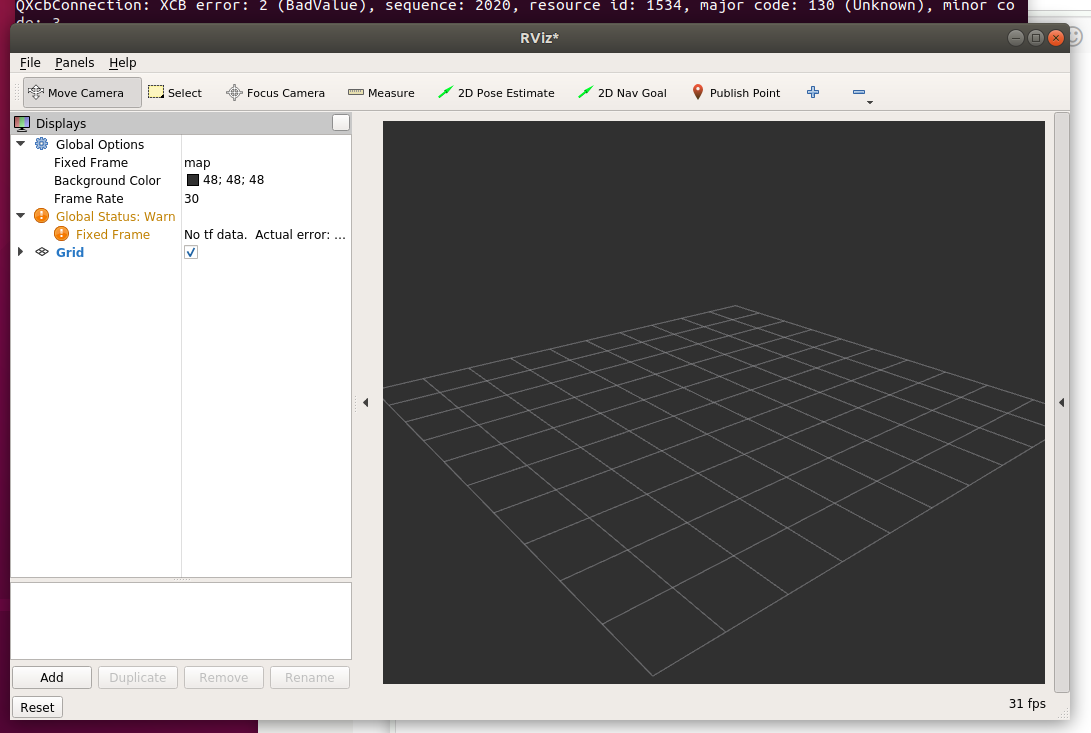
[INFO] [rviz2]: Stereo is NOT SUPPORTED
[INFO] [rviz2]: OpenGl version: 4.6 (GLSL 4.6)
ちゃんと、OpenGL 4.6とコンソールに出力されていました。
これで、やりたいことはできましたが、ホストマシンのディレクトリと一致させて、保存の手間を省きたいところです。