板と箱の接触解析をCyprien Rusuさんがyoutube上で公開されていたので、やってみました。普段使わない解析のため、動作チェックのみにとどめます。
使用ソフト:Salome-Meca 2018 for Windows
1.解析の概要
板の全周を固定し、立方体を一定距離・方向に板へ押し付けます。
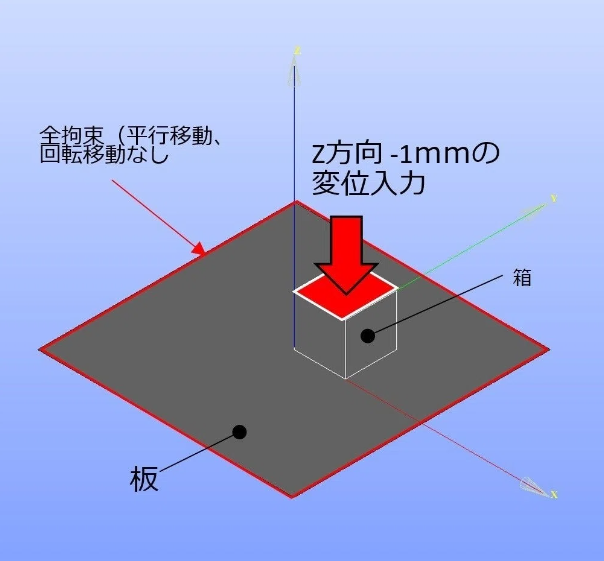
<モデル>
箱寸法:20mm立方体
板寸法:100mm角、厚み0.01mm
板と箱のヤング率:200000N/mm ポアソン比0.3
<拘束条件>
板全周:全固定(X,Y,Z方向固定、X軸、Y軸、Z軸回り固定)
荷重:箱の上からZ方向に-1mm変位させる。
接触条件:箱の底を板接触させる。
<メッシュ>
箱:4面体1次要素(ソリッド)
板:3角形1次要素(シェル)
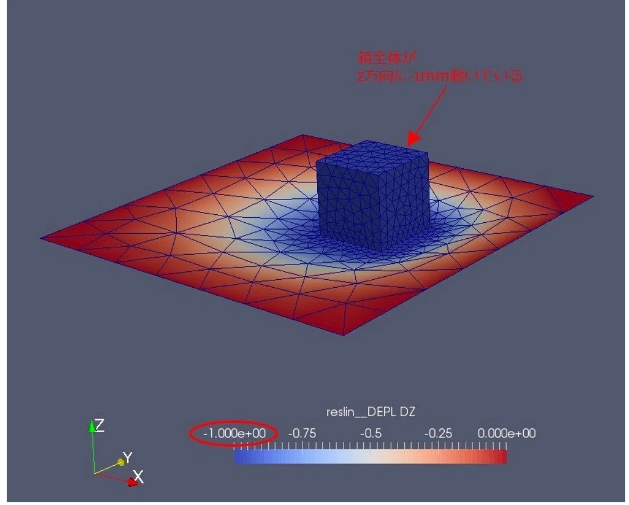
2.解析結果
箱周辺がZ方向に-1mm移動するのがわかります。よって、意図通り動作していると推定します。
3.解析ファイル(*.comm)の設定を見てみる
接触条件の設定を中心に自分なりに読み解いてみました。contact1: 板の接触面、contact2: 箱の接触面
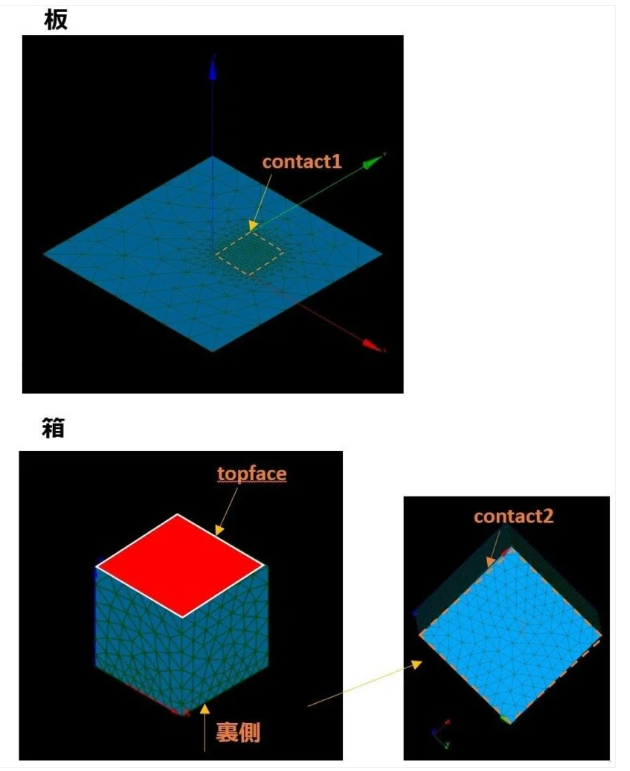
(2)板における箱との接触面の設定
---解析ファイルの内容----
CHNOR = CREA_CHAMP(identifier=u'9:1',GROUP_MA=('contact1', ),MODELE=model,OPERATION='NORMALE',TYPE_CHAM='NOEU_GEOM_R')
LIAISON_MAIL=_F(CHAM_NORMALE=CHNOR,
EPAIS=0.01,
GROUP_MA_MAIT=('box', ),
GROUP_NO_ESCL=('contact1', ),
TYPE_RACCORD='COQUE_MASSIF'),MODELE=model)
---解析ファイルの内容----
板の接触部(contact1)の設定をします。NOMALE、NOEU_GEOM_Rの2点で、面の認識をさせている模様です。
LIAISON_MAILで板と箱の結合を設定します。組み合わせは、box(箱)とcontact1の2つに設定する。GROUP_MA_MAIT -> マスター側GROUP_NO_ESCL -> スレーブ側COQUE_MASSIFで、接触面の動きを定義しています。マスター側(箱)は、全方向(XYZ)のみ動くスレーブ側(板)は、全方向(XYZ)、全回転(X軸、Y軸、Z軸)動く
箱接触面(Contact2)を解析上でなにかしら設定しなくとも大丈夫なのか気になりました。
4.まとめ
動作を確認でました。後日、シェル要素とソリッド要素を組み合わせて解析するときに深堀しようと思います。動画を公開いただきましたCyprien Rusu様には貴重な動画を公開いただいことをお礼申し上げます。
<参考資料>
1)Cyprien Rusuさんがyoutube上で公開されていた動画です。
https://www.youtube.com/watch?v=k94VwXISxoU2
CodeAster公式ページのコマンド解説
Documentation - code_aster www.code-aster.org
[U4.44.01] Operators AFFE_CHAR_MECA et AFFE_CHAR_MECA_F
[U4.23.03] Operator ASSE_MAILLAGE
[U4.72.04] Operator CREA_CHAMP