皆さんはROSを良く使っていると思います。そこで出てくる,Gazebo。こいつは何かご存知でしょうか。
Gazeboとはロボットシミュレータです。物理演算を含んでおります。さてこいつは個別で提供されており、単体でインストールできます。
ROSに使われているバージョンは古い!?
まず今の時点でよく使われているであろうROSはおそらくindigoであると思われますが,indigoで使われているGazeboのバージョンは2.2です。
一番新しいjadeでは5.0です。
2016年で一番新しいGazeboのバージョンは7.0です。
それってどうなの?って感じですが,実際に起動して適当にオブジェクトを置いてみると結構違いがあるとわかると思います。
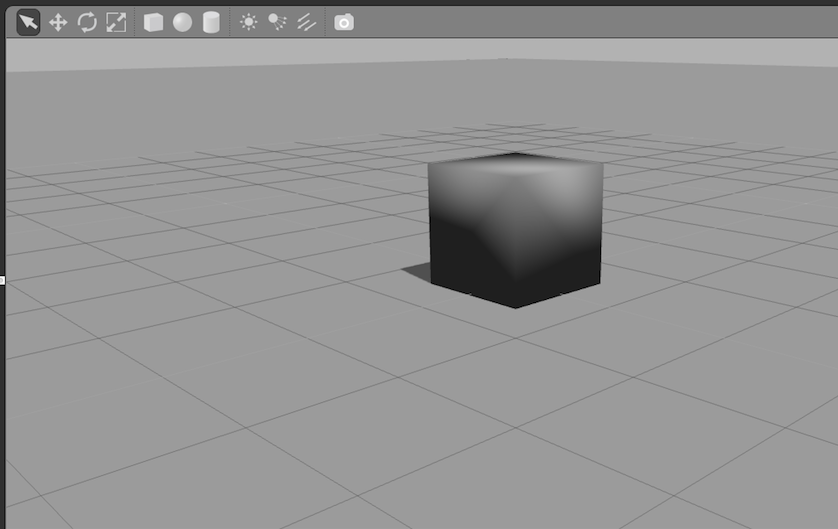
gazebo2.2.6
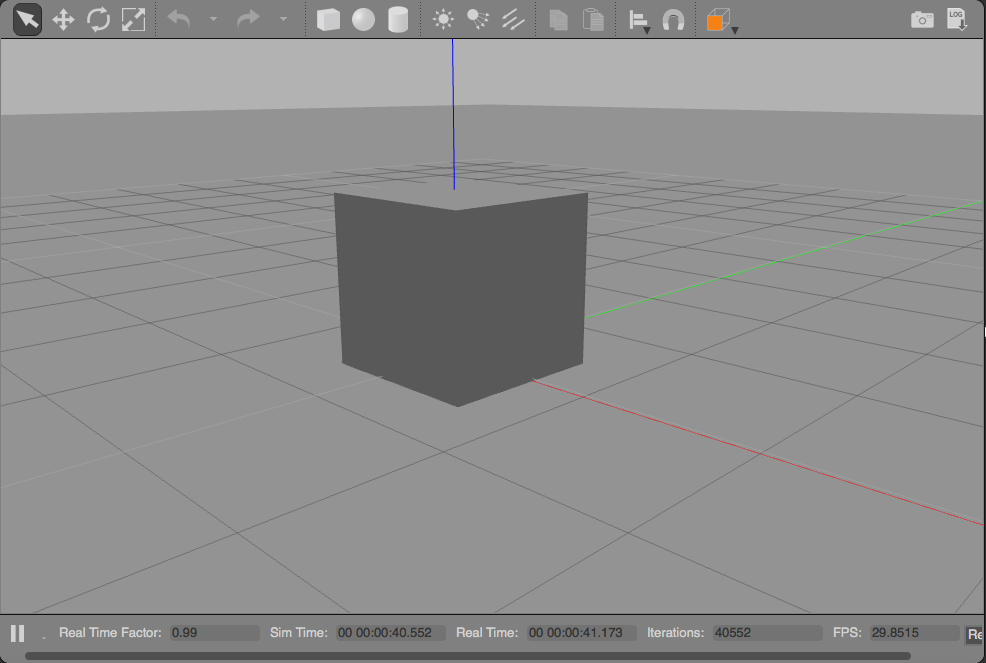
gazebo7.0
見た目だけではなく,色々変わっております。とは言うものの,gazeboのバージョンを差し替えはできません。別の方法で制御する必要があります。
gazeboを単体でインストールしてみよう
さて,とはいったもののほど難しいことではありません。公式ページに書いてあります。
今回はMac,Linuxのものにします。curlが必要なので,適宜インストールしてください。
curl -ssL http://get.gazebosim.org | sh
起動するには
gazebo
と端末で入力します。
また,
gzserver
と
gzclient
と入力することで起動することもできます。