この記事は、ヘボコン Advent Calendar 2017 https://adventar.org/calendars/2250 の23日目の記事です。
22日目は、チームめがねさんでした。
https://note.mu/niea_7/n/nc30054abf3d4
この記事では、ヘボコンを、ゲームクリエイトソフト LittleBigPlanetで再現することを目指します。
ヘボコンとは、技術力の低い人達が、ヘボいロボットを作って戦わせるコンテストです。(詳しくはこちら) https://portal.nifty.com/hebocon/whats.htm
私も、2017年夏のエア・ヘボコンに出場しました。一言で言うと、ロボット相撲ですね。
一方、LittleBigPlanetとは、物理シミュレーションや論理回路などを使ってオブジェクトの動作をプログラミングできる、ビジュアルプログラミングソフトです。プラットフォームはPlaystation3とPlaystation4です。LittleBigPlanetについては、こちらをご覧ください。
http://www.jp.playstation.com/scej/title/lbp/
※ 現在日本語版はネットワークサービスが終了しており、今回作ったものをプレイするには、海外版のLittleBigPlanet3が必要です。
LittleBigPlanetは物理エンジンを持っており、オブジェクトを組み合わせて機械や建物などを作ると、物理演算によりリアルな動きを再現することができます。そこで、ヘボいロボットを作って戦わせれば、ヘボコンの試合が再現できるのではと考えました。
以下、LittleBigPlanetをLBPと略します。
ヘボコンルールの再現
ヘボコンのルールの基本は相撲であり、以下の条件で勝敗が決まります。
(1) 100cm × 50cmの土俵から出たら負け
(2) 本体が倒れたら負け(パーツの脱落はセーフ)
(3) 60秒が経過した場合、動きが少なかったほうが負け。差がない場合は観戦者による多数決。
LBPでは、土俵の代わりにテーブルを作りました。
LBPには、アングルセンサーという仕組みがあります。センサーの傾きを判定することができます。車体にアングルセンサーを付けて、90度以上回転した場合を判定するようにします。
LBPには、タグとタグセンサーいう仕組みがあります。磁石のようなもので、センサーがタグに近づいたことを検知します。下の写真では、車体にタグセンサーとアングルセンサーを貼り付けています。アングルセンサーの検知範囲を、180°より小さい165°にしています。微妙に倒れきらず止まってしまった場合も負けと判定できるようにするためです。
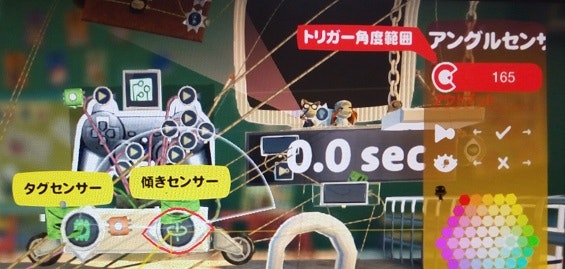
床にタグを並べて貼り付けました。車体に貼り付けたタグセンサーがタグを検知することにより、車体が床に落ちたことを判定することができます。

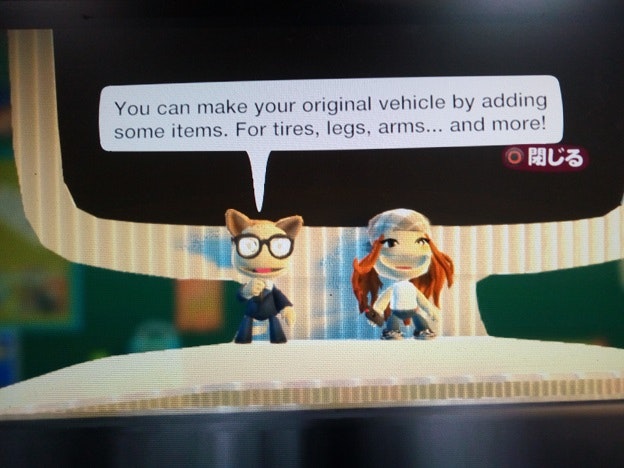
ヘボコンの醍醐味は、オリジナルのロボットを作ることです。テーブルの前に色々なアイテムを用意して、車体に取り付けることができるようにしました。

オリジナルロボットの作例
以下、ゲームをプレイしている人が自分で作ることができるロボットの例を紹介します。
- ボクシンググラブ
本体とグラブを接続します。直接接着する以外に、ピストンを介して接続する方法があります。ピストンの伸縮距離と往復時間を調整することができます。車体の後ろにコントローラの画像が見えますが、各ボタンとピストンを接続することにより、コントローラを使ってピストンを動かすことができます。

- ポップコーン
ポップコーンの箱には、あらかじめアングルセンサーとポップコーン発射機構を付けています。箱を傾けると、ポップコーンが飛び出します。対戦相手を足止めすることができる、かもしれません...。

- 二足歩行機
ロボットといえば、二足歩行に憧れます、私は。ついでに入れ歯を付ければ、攻撃力もアップする、かな?

- タコ足
ヘボコンでなくて本家ロボコンをテレビで見ていたら、やわらかい素材を使ったロボットが活躍していて、審査員から大賞を受賞していました。やわらかい素材を使ってみたいので、タコ足を用意しました。サーボモーターを付けて、相手を持ち上げてやりましょう。

その他、りんごにモーターを付けて走行能力を上げたり、恐竜に車体を引かせて古代ローマの戦車を作るなど、想像力と創造力と妄想を働かせて、ヘボいロボットを作ってみましょう。
プレイの流れ
では、実際にプレイしたときの流れを見て見ましょう。司会者の方が、進行を勤めます。
部品を組み合わせて、ロボットを作ります。

本家ヘボコンで有名な、ポールダンスロボットを再現すべく、回転するバレリーナと電飾を施しました。2人のプレイヤーが車体に乗り込むと、試合開始です。

対戦相手がテーブルから落下して、決着がつきました。

試合が決着すると、司会者に賞賛されます。

おわりに
作ったものは、Playstationのネットワークを介して公開することができます。このゲームの情報は、以下のURLでWebブラウザで見ることができます。12/21(木)現在、いいね!が0件です。私、今まで公開した中で最低の反応となっています...。素晴らしいゲームを期待しているのに、へぼさを追求されても、受け入れられないようです。リアルヘボコンを知っている人同士で対戦してみたいです。
Heboi Sumo Robot Contest
https://lbp.me/v/q2g55eb
プレイ映像をYouTubeで見ることができます。

次の記事は、まだ決まっていません。advent calenderをチェックしてみてください。
https://adventar.org/calendars/2250
投稿をお待ちしています。