概要
Yahboom社のRosMasterX3Plusを研究室で購入したのだが、組み立て後スマホアプリからの操作をマニュアル通りに実行しても挙動が安定しなかったので、それの対処法について共有する。
Appからの操作ができない
RosMasterを操作するアプリをダウンロードし、RosMasterのローカルネットワークに接続したものの、操作できないことが多い
- Raspi起動時に3回連続の電子音がすれば起動が成功,しなければ失敗らしい
考えられる原因
- ネットワークが安定していない
-
python ~/Rosmaster/rosmaster/rosmaster_main.pyなどのスクリプト実行時の出力
debug= False Rosmaster Serial Opened! Baudrate=115200
----------------create receive threading--------------
TCP Service IP= 192.168.1.11
Waiting for the client to connect!
Version: -1
Waiting for connect to the APP!
Version: -1になっていると正しく動作していない
対処法
- シャットダウン
- USB 拡張ボードのスイッチがonになっているかを確認する
- voice interaction moduleに挿さっているケーブルを抜く
- なぜかわからないけど動きます
- 多分、電力供給の問題かなと思います
- 上のUSB拡張ボードにも直接電源供給できるようになれば、解決する気がする
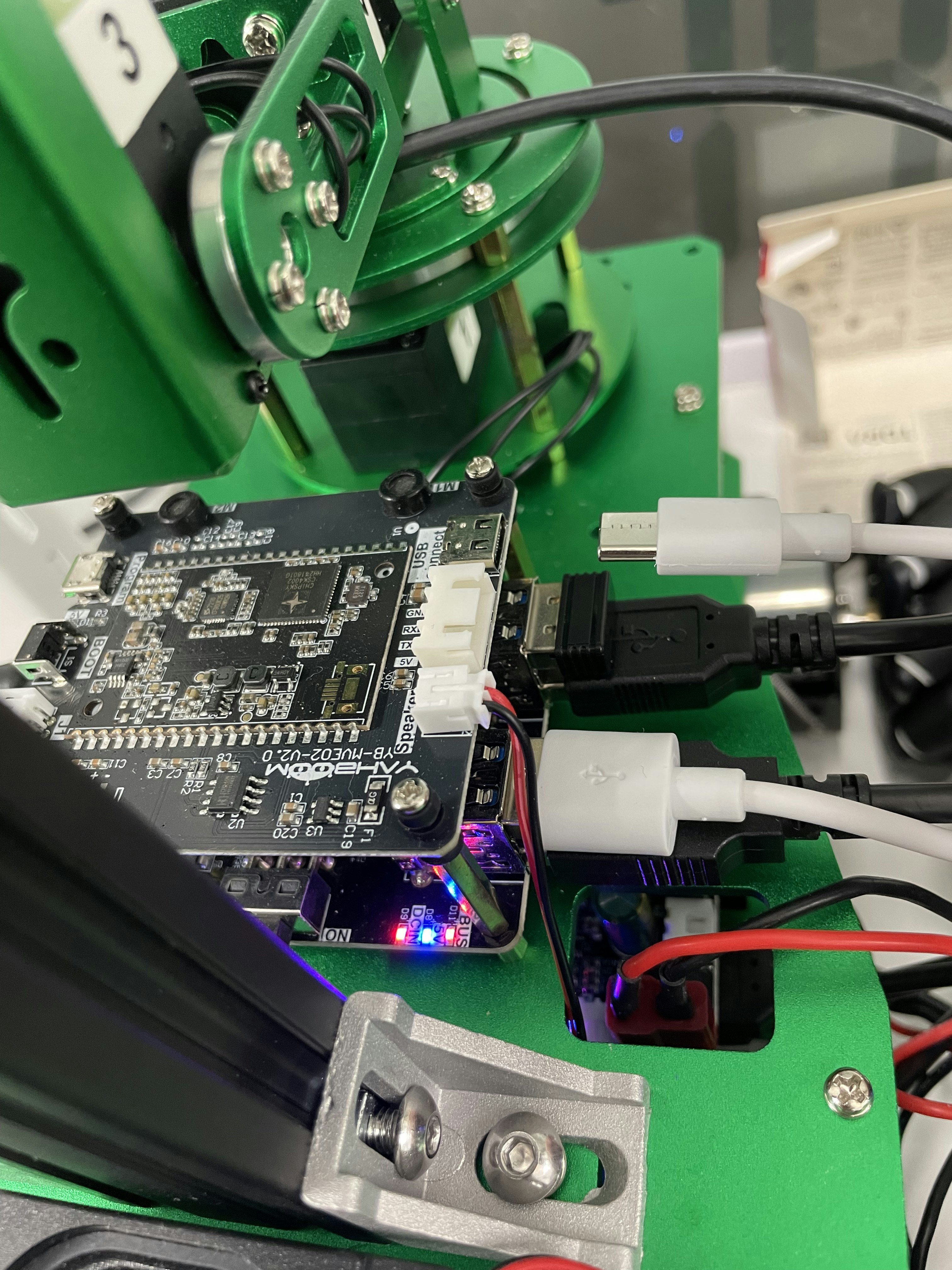
一番上のボード(voice interaction module)に刺さっているタイプCケーブル抜くとなぜか正常に動作する
私のいる研究室では写真の部分のコードを常に抜いてRosMasterを触ることにしました
いいお値段するんだから、正常に動いてほしいですよね、、、、
(参考) yahboomのサポートチームに問い合わせた時の回答
The version number displayed as -1 is indeed incorrect, which is the key to the problem. -1 means that the system does not recognize the firmware version of the ROS driver board.
Please follow the steps below to troubleshoot:
Check the MCU status indicator on the ROS expansion board to see if it flashes normally (flashes twice in three seconds). If it is always on or off, there is a problem with the expansion board.
If the error in the figure still appears after re-burning the firmware, connect the ros expansion board to the computer and use the serial port assistant to view the printed content.
The expansion board can be directly connected to the main control and check whether the USBhub board is connected to the 12V power supply. This situation will occur if it is not connected to the 12V power supply.
Check whether the switch of the usbhub board is turned on.
Customers who purchase the voice board should not install the voice board first to avoid device id conflicts.
Check whether the usb connect interface of the ros driver expansion board is connected and whether there is poor contact. Or change a microUSB cable.