ピン配置
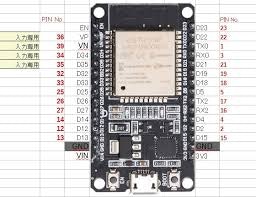
I2C
$I^2C$でのピン配置
| 定数 | PIN |
|---|---|
| SDA | D21 |
| SLI | D22 |
BME280モジュール
micropythonではpipがないため,モジュールをインストールすることができない.
そのため自分でファイルを作成する必要がある.
以下に2つのモジュールをなげておく.
一つメ
# Updated 2018
# This module is based on the below cited resources, which are all
# based on the documentation as provided in the Bosch Data Sheet and
# the sample implementation provided therein.
#
# Final Document: BST-BME280-DS002-15
#
# Authors: Paul Cunnane 2016, Peter Dahlebrg 2016
#
# This module borrows from the Adafruit BME280 Python library. Original
# Copyright notices are reproduced below.
#
# Those libraries were written for the Raspberry Pi. This modification is
# intended for the MicroPython and esp8266 boards.
#
# Copyright (c) 2014 Adafruit Industries
# Author: Tony DiCola
#
# Based on the BMP280 driver with BME280 changes provided by
# David J Taylor, Edinburgh (www.satsignal.eu)
#
# Based on Adafruit_I2C.py created by Kevin Townsend.
#
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documentation files (the "Software"), to deal
# in the Software without restriction, including without limitation the rights
# to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
# copies of the Software, and to permit persons to whom the Software is
# furnished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
# THE SOFTWARE.
#
# Based on the documentation as provided in the Bosch Data Sheet and
# the sample implementation provided therein.
# Document BST-BME280-DS002-15
#
import time
from ustruct import unpack, unpack_from
from array import array
# BME280 default address.
BME280_I2CADDR = 0x76
# Operating Modes
BME280_OSAMPLE_1 = 1
BME280_OSAMPLE_2 = 2
BME280_OSAMPLE_4 = 3
BME280_OSAMPLE_8 = 4
BME280_OSAMPLE_16 = 5
BME280_REGISTER_CONTROL_HUM = 0xF2
BME280_REGISTER_STATUS = 0xF3
BME280_REGISTER_CONTROL = 0xF4
MODE_SLEEP = const(0)
MODE_FORCED = const(1)
MODE_NORMAL = const(3)
class BME280:
def __init__(self,
mode=BME280_OSAMPLE_8,
address=BME280_I2CADDR,
i2c=None,
**kwargs):
# Check that mode is valid.
if mode not in [BME280_OSAMPLE_1, BME280_OSAMPLE_2, BME280_OSAMPLE_4,BME280_OSAMPLE_8, BME280_OSAMPLE_16]:
raise ValueError(
'Unexpected mode value {0}. Set mode to one of '
'BME280_OSAMPLE_1, BME280_OSAMPLE_2, BME280_OSAMPLE_4,'
'BME280_OSAMPLE_8, BME280_OSAMPLE_16'.format(mode))
self._mode = mode
self.address = address
if i2c is None:
raise ValueError('An I2C object is required.')
self.i2c = i2c
self.__sealevel = 101325
dig_88_a1 = self.i2c.readfrom_mem(self.address, 0x88, 26)
dig_e1_e7 = self.i2c.readfrom_mem(self.address, 0xE1, 7)
self.dig_T1, self.dig_T2, self.dig_T3, self.dig_P1, \
self.dig_P2, self.dig_P3, self.dig_P4, self.dig_P5, \
self.dig_P6, self.dig_P7, self.dig_P8, self.dig_P9, \
_, self.dig_H1 = unpack("<HhhHhhhhhhhhBB", dig_88_a1)
self.dig_H2, self.dig_H3, self.dig_H4,\
self.dig_H5, self.dig_H6 = unpack("<hBbhb", dig_e1_e7)
# unfold H4, H5, keeping care of a potential sign
self.dig_H4 = (self.dig_H4 * 16) + (self.dig_H5 & 0xF)
self.dig_H5 //= 16
self.t_fine = 0
# temporary data holders which stay allocated
self._l1_barray = bytearray(1)
self._l8_barray = bytearray(8)
self._l3_resultarray = array("i", [0, 0, 0])
self._l1_barray[0] = self._mode << 5 | self._mode << 2 | MODE_SLEEP
self.i2c.writeto_mem(self.address, BME280_REGISTER_CONTROL,
bytearray([0x3c | MODE_SLEEP]))
def read_raw_data(self, result):
""" Reads the raw (uncompensated) data from the sensor.
Args:
result: array of length 3 or alike where the result will be
stored, in temperature, pressure, humidity order
Returns:
None
"""
self._l1_barray[0] = self._mode
self.i2c.writeto_mem(self.address, BME280_REGISTER_CONTROL_HUM,
self._l1_barray)
self._l1_barray[0] = self._mode << 5 | self._mode << 2 | MODE_FORCED
self.i2c.writeto_mem(self.address, BME280_REGISTER_CONTROL,
self._l1_barray)
# Wait for conversion to complete
while self.i2c.readfrom_mem(self.address, BME280_REGISTER_STATUS, 1)[0] & 0x08:
time.sleep_ms(10)
# burst readout from 0xF7 to 0xFE, recommended by datasheet
self.i2c.readfrom_mem_into(self.address, 0xF7, self._l8_barray)
readout = self._l8_barray
# pressure(0xF7): ((msb << 16) | (lsb << 8) | xlsb) >> 4
raw_press = ((readout[0] << 16) | (readout[1] << 8) | readout[2]) >> 4
# temperature(0xFA): ((msb << 16) | (lsb << 8) | xlsb) >> 4
raw_temp = ((readout[3] << 16) | (readout[4] << 8) | readout[5]) >> 4
# humidity(0xFD): (msb << 8) | lsb
raw_hum = (readout[6] << 8) | readout[7]
result[0] = raw_temp
result[1] = raw_press
result[2] = raw_hum
def read_compensated_data(self, result=None):
""" Reads the data from the sensor and returns the compensated data.
Args:
result: array of length 3 or alike where the result will be
stored, in temperature, pressure, humidity order. You may use
this to read out the sensor without allocating heap memory
Returns:
array with temperature, pressure, humidity. Will be the one
from the result parameter if not None
"""
self.read_raw_data(self._l3_resultarray)
raw_temp, raw_press, raw_hum = self._l3_resultarray
# temperature
var1 = (((raw_temp // 8) - (self.dig_T1 * 2)) * self.dig_T2) // 2048
var2 = (raw_temp // 16) - self.dig_T1
var2 = (((var2 * var2) // 4096) * self.dig_T3) // 16384
self.t_fine = var1 + var2
temp = (self.t_fine * 5 + 128) // 256
# pressure
var1 = self.t_fine - 128000
var2 = var1 * var1 * self.dig_P6
var2 = var2 + ((var1 * self.dig_P5) << 17)
var2 = var2 + (self.dig_P4 << 35)
var1 = (((var1 * var1 * self.dig_P3) >> 8) +
((var1 * self.dig_P2) << 12))
var1 = (((1 << 47) + var1) * self.dig_P1) >> 33
if var1 == 0:
pressure = 0
else:
p = ((((1048576 - raw_press) << 31) - var2) * 3125) // var1
var1 = (self.dig_P9 * (p >> 13) * (p >> 13)) >> 25
var2 = (self.dig_P8 * p) >> 19
pressure = ((p + var1 + var2) >> 8) + (self.dig_P7 << 4)
# humidity
h = self.t_fine - 76800
h = (((((raw_hum << 14) - (self.dig_H4 << 20) -
(self.dig_H5 * h)) + 16384) >> 15) *
(((((((h * self.dig_H6) >> 10) *
(((h * self.dig_H3) >> 11) + 32768)) >> 10) + 2097152) *
self.dig_H2 + 8192) >> 14))
h = h - (((((h >> 15) * (h >> 15)) >> 7) * self.dig_H1) >> 4)
h = 0 if h < 0 else h
h = 419430400 if h > 419430400 else h
humidity = h >> 12
if result:
result[0] = temp
result[1] = pressure
result[2] = humidity
return result
return array("i", (temp, pressure, humidity))
@property
def sealevel(self):
return self.__sealevel
@sealevel.setter
def sealevel(self, value):
if 300 < value < 1200: # just ensure some reasonable value
self.__sealevel = value
@property
def altitude(self):
'''
Altitude in m.
'''
from math import pow
try:
p = 44330 * (1.0 - pow((self.read_compensated_data()[1] / 256) /
self.__sealevel, 0.1903))
except:
p = 0.0
return p
@property
def dew_point(self):
"""
Compute the dew point temperature for the current Temperature
and Humidity measured pair
"""
from math import log
t, p, h = self.read_compensated_data()
t /= 100
h /= 1024
h = (log(h, 10) - 2) / 0.4343 + (17.62 * t) / (243.12 + t)
return (243.12 * h / (17.62 - h)) * 100
@property
def values(self):
""" human readable values """
t, p, h = self.read_compensated_data()
p = p / 256
h = h / 1024
return ("{}C".format(t / 100), "{:.02f}hPa".format(p/100),
"{:.02f}%".format(h))
2つメ
https://github.com/robert-hh/BME280
こちらから拝借
from machine import I2C
import time
# BME280 default address.
BME280_I2CADDR = 0x76
# Operating Modes
BME280_OSAMPLE_1 = 1
BME280_OSAMPLE_2 = 2
BME280_OSAMPLE_4 = 3
BME280_OSAMPLE_8 = 4
BME280_OSAMPLE_16 = 5
# BME280 Registers
BME280_REGISTER_DIG_T1 = 0x88 # Trimming parameter registers
BME280_REGISTER_DIG_T2 = 0x8A
BME280_REGISTER_DIG_T3 = 0x8C
BME280_REGISTER_DIG_P1 = 0x8E
BME280_REGISTER_DIG_P2 = 0x90
BME280_REGISTER_DIG_P3 = 0x92
BME280_REGISTER_DIG_P4 = 0x94
BME280_REGISTER_DIG_P5 = 0x96
BME280_REGISTER_DIG_P6 = 0x98
BME280_REGISTER_DIG_P7 = 0x9A
BME280_REGISTER_DIG_P8 = 0x9C
BME280_REGISTER_DIG_P9 = 0x9E
BME280_REGISTER_DIG_H1 = 0xA1
BME280_REGISTER_DIG_H2 = 0xE1
BME280_REGISTER_DIG_H3 = 0xE3
BME280_REGISTER_DIG_H4 = 0xE4
BME280_REGISTER_DIG_H5 = 0xE5
BME280_REGISTER_DIG_H6 = 0xE6
BME280_REGISTER_DIG_H7 = 0xE7
BME280_REGISTER_CHIPID = 0xD0
BME280_REGISTER_VERSION = 0xD1
BME280_REGISTER_SOFTRESET = 0xE0
BME280_REGISTER_CONTROL_HUM = 0xF2
BME280_REGISTER_CONTROL = 0xF4
BME280_REGISTER_CONFIG = 0xF5
BME280_REGISTER_PRESSURE_DATA = 0xF7
BME280_REGISTER_TEMP_DATA = 0xFA
BME280_REGISTER_HUMIDITY_DATA = 0xFD
class Device:
"""Class for communicating with an I2C device.
Allows reading and writing 8-bit, 16-bit, and byte array values to
registers on the device."""
def __init__(self, address, i2c):
"""Create an instance of the I2C device at the specified address using
the specified I2C interface object."""
self._address = address
self._i2c = i2c
def writeRaw8(self, value):
"""Write an 8-bit value on the bus (without register)."""
value = value & 0xFF
self._i2c.writeto(self._address, value)
def write8(self, register, value):
"""Write an 8-bit value to the specified register."""
b=bytearray(1)
b[0]=value & 0xFF
self._i2c.writeto_mem(self._address, register, b)
def write16(self, register, value):
"""Write a 16-bit value to the specified register."""
value = value & 0xFFFF
b=bytearray(2)
b[0]= value & 0xFF
b[1]= (value>>8) & 0xFF
self.i2c.writeto_mem(self._address, register, value)
def readRaw8(self):
"""Read an 8-bit value on the bus (without register)."""
return int.from_bytes(self._i2c.readfrom(self._address, 1),'little') & 0xFF
def readU8(self, register):
"""Read an unsigned byte from the specified register."""
return int.from_bytes(
self._i2c.readfrom_mem(self._address, register, 1),'little') & 0xFF
def readS8(self, register):
"""Read a signed byte from the specified register."""
result = self.readU8(register)
if result > 127:
result -= 256
return result
def readU16(self, register, little_endian=True):
result = int.from_bytes(
self._i2c.readfrom_mem(self._address, register, 2),'little') & 0xFFFF
if not little_endian:
result = ((result << 8) & 0xFF00) + (result >> 8)
return result
def readS16(self, register, little_endian=True):
"""Read a signed 16-bit value from the specified register, with the
specified endianness (default little endian, or least significant byte
first)."""
result = self.readU16(register, little_endian)
if result > 32767:
result -= 65536
return result
def readU16LE(self, register):
"""Read an unsigned 16-bit value from the specified register, in little
endian byte order."""
return self.readU16(register, little_endian=True)
def readU16BE(self, register):
"""Read an unsigned 16-bit value from the specified register, in big
endian byte order."""
return self.readU16(register, little_endian=False)
def readS16LE(self, register):
"""Read a signed 16-bit value from the specified register, in little
endian byte order."""
return self.readS16(register, little_endian=True)
def readS16BE(self, register):
"""Read a signed 16-bit value from the specified register, in big
endian byte order."""
return self.readS16(register, little_endian=False)
class BME280:
def __init__(self, mode=BME280_OSAMPLE_1, address=BME280_I2CADDR, i2c=None,
**kwargs):
# Check that mode is valid.
if mode not in [BME280_OSAMPLE_1, BME280_OSAMPLE_2, BME280_OSAMPLE_4,
BME280_OSAMPLE_8, BME280_OSAMPLE_16]:
raise ValueError(
'Unexpected mode value {0}. Set mode to one of '
'BME280_ULTRALOWPOWER, BME280_STANDARD, BME280_HIGHRES, or '
'BME280_ULTRAHIGHRES'.format(mode))
self._mode = mode
# Create I2C device.
if i2c is None:
raise ValueError('An I2C object is required.')
self._device = Device(address, i2c)
# Load calibration values.
self._load_calibration()
self._device.write8(BME280_REGISTER_CONTROL, 0x3F)
self.t_fine = 0
def _load_calibration(self):
self.dig_T1 = self._device.readU16LE(BME280_REGISTER_DIG_T1)
self.dig_T2 = self._device.readS16LE(BME280_REGISTER_DIG_T2)
self.dig_T3 = self._device.readS16LE(BME280_REGISTER_DIG_T3)
self.dig_P1 = self._device.readU16LE(BME280_REGISTER_DIG_P1)
self.dig_P2 = self._device.readS16LE(BME280_REGISTER_DIG_P2)
self.dig_P3 = self._device.readS16LE(BME280_REGISTER_DIG_P3)
self.dig_P4 = self._device.readS16LE(BME280_REGISTER_DIG_P4)
self.dig_P5 = self._device.readS16LE(BME280_REGISTER_DIG_P5)
self.dig_P6 = self._device.readS16LE(BME280_REGISTER_DIG_P6)
self.dig_P7 = self._device.readS16LE(BME280_REGISTER_DIG_P7)
self.dig_P8 = self._device.readS16LE(BME280_REGISTER_DIG_P8)
self.dig_P9 = self._device.readS16LE(BME280_REGISTER_DIG_P9)
self.dig_H1 = self._device.readU8(BME280_REGISTER_DIG_H1)
self.dig_H2 = self._device.readS16LE(BME280_REGISTER_DIG_H2)
self.dig_H3 = self._device.readU8(BME280_REGISTER_DIG_H3)
self.dig_H6 = self._device.readS8(BME280_REGISTER_DIG_H7)
h4 = self._device.readS8(BME280_REGISTER_DIG_H4)
h4 = (h4 << 24) >> 20
self.dig_H4 = h4 | (self._device.readU8(BME280_REGISTER_DIG_H5) & 0x0F)
h5 = self._device.readS8(BME280_REGISTER_DIG_H6)
h5 = (h5 << 24) >> 20
self.dig_H5 = h5 | (
self._device.readU8(BME280_REGISTER_DIG_H5) >> 4 & 0x0F)
def read_raw_temp(self):
"""Reads the raw (uncompensated) temperature from the sensor."""
meas = self._mode
self._device.write8(BME280_REGISTER_CONTROL_HUM, meas)
meas = self._mode << 5 | self._mode << 2 | 1
self._device.write8(BME280_REGISTER_CONTROL, meas)
sleep_time = 1250 + 2300 * (1 << self._mode)
sleep_time = sleep_time + 2300 * (1 << self._mode) + 575
sleep_time = sleep_time + 2300 * (1 << self._mode) + 575
time.sleep_us(sleep_time) # Wait the required time
msb = self._device.readU8(BME280_REGISTER_TEMP_DATA)
lsb = self._device.readU8(BME280_REGISTER_TEMP_DATA + 1)
xlsb = self._device.readU8(BME280_REGISTER_TEMP_DATA + 2)
raw = ((msb << 16) | (lsb << 8) | xlsb) >> 4
return raw
def read_raw_pressure(self):
"""Reads the raw (uncompensated) pressure level from the sensor."""
"""Assumes that the temperature has already been read """
"""i.e. that enough delay has been provided"""
msb = self._device.readU8(BME280_REGISTER_PRESSURE_DATA)
lsb = self._device.readU8(BME280_REGISTER_PRESSURE_DATA + 1)
xlsb = self._device.readU8(BME280_REGISTER_PRESSURE_DATA + 2)
raw = ((msb << 16) | (lsb << 8) | xlsb) >> 4
return raw
def read_raw_humidity(self):
"""Assumes that the temperature has already been read """
"""i.e. that enough delay has been provided"""
msb = self._device.readU8(BME280_REGISTER_HUMIDITY_DATA)
lsb = self._device.readU8(BME280_REGISTER_HUMIDITY_DATA + 1)
raw = (msb << 8) | lsb
return raw
def read_temperature(self):
"""Get the compensated temperature in 0.01 of a degree celsius."""
adc = self.read_raw_temp()
var1 = ((adc >> 3) - (self.dig_T1 << 1)) * (self.dig_T2 >> 11)
var2 = ((
(((adc >> 4) - self.dig_T1) * ((adc >> 4) - self.dig_T1)) >> 12) *
self.dig_T3) >> 14
self.t_fine = var1 + var2
return (self.t_fine * 5 + 128) >> 8
def read_pressure(self):
"""Gets the compensated pressure in Pascals."""
adc = self.read_raw_pressure()
var1 = self.t_fine - 128000
var2 = var1 * var1 * self.dig_P6
var2 = var2 + ((var1 * self.dig_P5) << 17)
var2 = var2 + (self.dig_P4 << 35)
var1 = (((var1 * var1 * self.dig_P3) >> 8) +
((var1 * self.dig_P2) >> 12))
var1 = (((1 << 47) + var1) * self.dig_P1) >> 33
if var1 == 0:
return 0
p = 1048576 - adc
p = (((p << 31) - var2) * 3125) // var1
var1 = (self.dig_P9 * (p >> 13) * (p >> 13)) >> 25
var2 = (self.dig_P8 * p) >> 19
return ((p + var1 + var2) >> 8) + (self.dig_P7 << 4)
def read_humidity(self):
adc = self.read_raw_humidity()
# print 'Raw humidity = {0:d}'.format (adc)
h = self.t_fine - 76800
h = (((((adc << 14) - (self.dig_H4 << 20) - (self.dig_H5 * h)) +
16384) >> 15) * (((((((h * self.dig_H6) >> 10) * (((h *
self.dig_H3) >> 11) + 32768)) >> 10) + 2097152) *
self.dig_H2 + 8192) >> 14))
h = h - (((((h >> 15) * (h >> 15)) >> 7) * self.dig_H1) >> 4)
h = 0 if h < 0 else h
h = 419430400 if h > 419430400 else h
return h >> 12
@property
def temperature(self):
"Return the temperature in degrees."
t = self.read_temperature()
ti = t // 100
td = t - ti * 100
return "{}.{:02d}C".format(ti, td)
@property
def pressure(self):
"Return the temperature in hPa."
p = self.read_pressure() // 256
pi = p // 100
pd = p - pi * 100
return "{}.{:02d}hPa".format(pi, pd)
@property
def humidity(self):
"Return the humidity in percent."
h = self.read_humidity()
hi = h // 1024
hd = h * 100 // 1024 - hi * 100
return "{}.{:02d}%".format(hi, hd)
BME280からデータ取得
モジュールの設置が完了したので実際にデータを取ってみます!
1つメのモジュールでは以下
from machine import I2C,Pin
from BME280 import *
from utime import sleep
p21 = Pin(21,Pin.IN,Pin.PULL_UP)
p22 = Pin(22,Pin.IN,Pin.PULL_UP)
i2c =I2C(scl=Pin(22), sda=Pin(21))
bme280 = BME280(i2c=i2c)
while True:
print(bme280.values)
sleep(1)
これは1秒ごとにBME280から温度,湿度,気圧を取得する.
実行結果
('27.14C', '984.20hPa', '48.77%')
('27.14C', '984.19hPa', '48.79%')
('27.14C', '984.16hPa', '48.81%')
('27.13C', '984.16hPa', '48.90%')
('27.13C', '984.17hPa', '48.92%')
('27.14C', '984.22hPa', '48.89%')
('27.14C', '984.20hPa', '48.98%')
重要な点!!
- ピンのプルアップ
ピンをプルアップしなければI2Cは使うことができない.
※SCL/SDAの 2つの信号配線は、 それぞれ、 電源に、 抵抗を介してプルアップする必要がある.
#プルアップの方法
from machine import Pin
p21 = Pin(21,Pin.IN,Pin.PULL_UP) # 21ピンをプルアップ
p22 = Pin(22,Pin.IN,Pin.PULL_UP) # 22ピンをプルアップ
- SCL,SDAのピン設定
SCL,SDAで利用するピンを設定しなければならない.
ESP32ではピン配置から,以下のように決まっている
再喝
| 定数 | PIN |
|---|---|
| SDA | D21 |
| SLI(SCL) | D22 |
from machine import I2C
i2c =I2C(scl=Pin(22), sda=Pin(21))
2つメのモジュールでは以下
from machine import Pin, I2C
from time import sleep
import BME280
p21 = Pin(21,Pin.IN,Pin.PULL_UP)
p22 = Pin(22,Pin.IN,Pin.PULL_UP)
i2c = I2C(scl=Pin(22), sda=Pin(21), freq=10000)
while True:
bme = BME280.BME280(i2c=i2c)
temp = bme.temperature
hum = bme.humidity
pres = bme.pressure
# uncomment for temperature in Fahrenheit
#temp = (bme.read_temperature()/100) * (9/5) + 32
#temp = str(round(temp, 2)) + 'F'
print('Temperature: ', temp)
print('Humidity: ', hum)
print('Pressure: ', pres)
sleep(5)
実行結果
emperature: 25.18C
Humidity: 48.23%
Pressure: 980.50hPa
Temperature: 25.18C
Humidity: 48.35%
Pressure: 980.56hPa
Temperature: 25.19C
Humidity: 48.52%
Pressure: 980.48hPa
Temperature: 25.20C
Humidity: 48.52%
Pressure: 980.45hPa
無事温度・湿度・気圧を取得できたら成功です!
お疲れ様でした
