背景
前回に続いて、Fusion360用のデバイスを制作しました。
作成に至った詳細やハードウエアについては、別のブログ記事に書いています。
こちらでは、電気回路とコード内容について書きました。
電気回路
使用した電気部品は次の通りです。
| アイテム | 数量 | 備考 |
|---|---|---|
| マイコンProMicro | 1個 | |
| ジョイスティックモジュールA | 1個 | 傾けるタイプ |
| ジョイスティックモジュールB | 2個 | 平行移動タイプ |
| タクトスイッチ | 1個 | リセット用 |
次のブレッドボード図を参考お願いします。
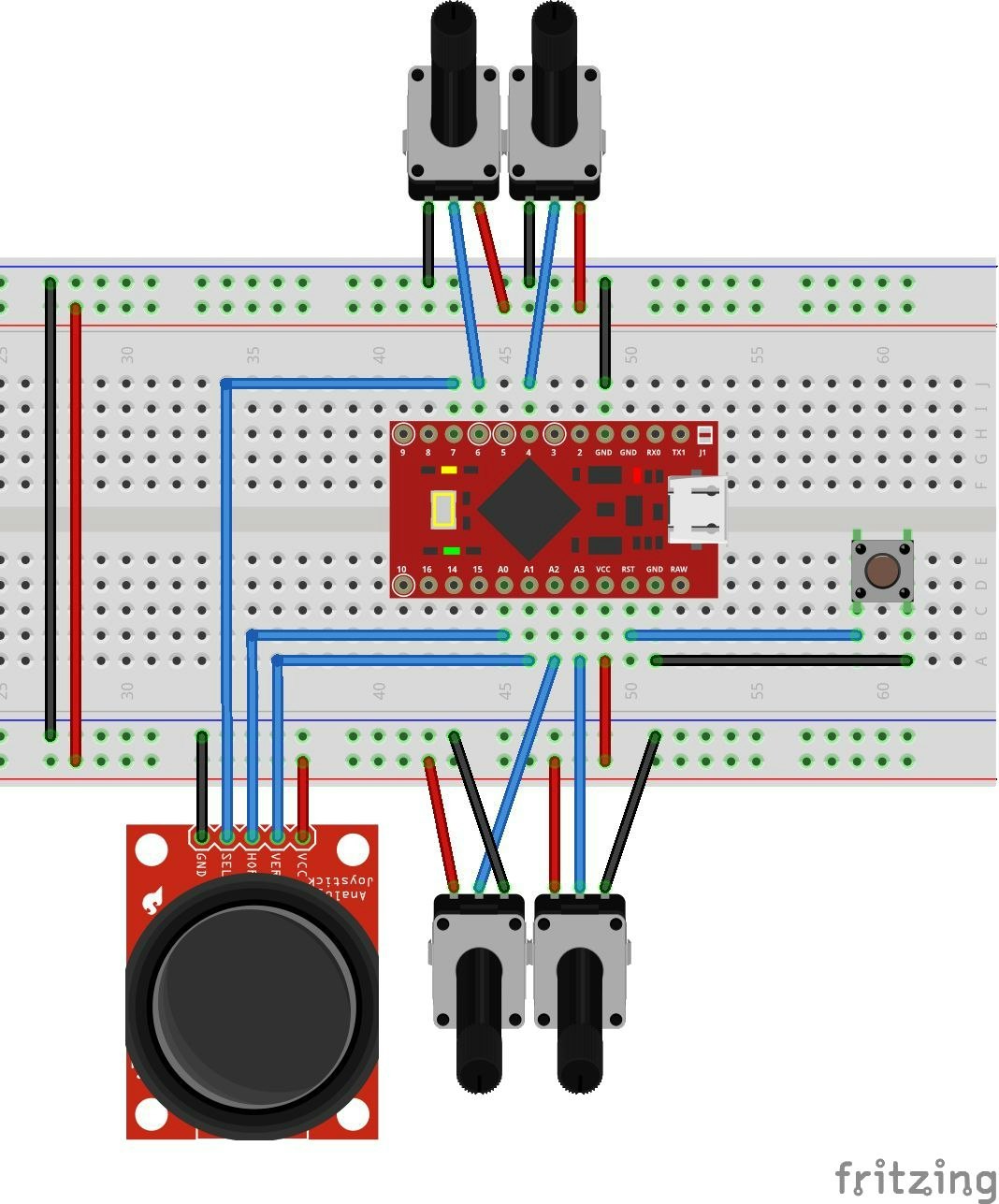
可変抵抗(ボリューム)が2個並んでいるのは、ジョイスティックB(平行移動タイプ)1個
の意味です。丁度良い素材が無く、回路的に等価なので、このような表現にさせて
いただきました。
コード内容
Arduino IDE 1.8.0 を使用しました。
スケッチ例 => 09.USB => Mouse => JoystickMouseControl を参考にしました。
以下、コードを少し区切って説明します。
順番に全てを繋げれば動くはずですが、必要に応じて適時修正お願いします。
# include "Keyboard.h"
# include "Mouse.h"
// set pin numbers for switch, joystick axes, and LED:
const int txAxis = A0; // tilt joystick X axis
const int tyAxis = A1; // tilt joystick Y axis
const int s1xAxis = A2; // shift1 joystick X axis
const int s1yAxis = A3; // shift1 joystick Y axis
const int s2xAxis = A6; // shift2 joystick X axis(A6=4)
const int s2yAxis = A7; // shift2 joystick Y axis(A7=6)
const int fitButton = 7; // input pin for zoom fit mode
// parameters for reading the joystick:
int range = 30; // output range of X or Y movement
int responseDelay = 40; // response delay of the mouse, in ms
int threshold = range / 6; // resting threshold
int center = range / 2; // resting position value
int zmSens = 6; // zoom sensitivity
int modeState = 0; // effective mode state
int lastModeState = 0; // previous mode state
int modeTimes = 10; // reset at stated periods
int modeTime = 0;
int xMoved = 0; // x moved total
int yMoved = 0; // y moved total
void setup() {
pinMode(fitButton, INPUT_PULLUP);
// take control of the mouse:
Mouse.begin();
Keyboard.begin();
}
void loop() {
// read and scale the two axes:
int txMove = - readAxis(txAxis);
int tyMove = - readAxis(tyAxis);
int sxMove = - (readAxis(s1xAxis) + readAxis(s2xAxis) ) / 2;
int syMove = (readAxis(s1yAxis) - readAxis(s2yAxis) ) / 2;
int zmMove = (readAxis(s1yAxis) + readAxis(s2yAxis) ) / 2;
int fitMode = digitalRead(fitButton);
冒頭は、I/Oピン定義、各変数の定義です。
全ての変数の意味は、すみませんが説明省略します。
loopの最初、各ジョイスティックの入力を変数に代入しています。
向きを間違えていたので、マウス座標に合わせるために正負符号付けました。
| 変数 | 目的 | センサー | 操作 |
|---|---|---|---|
| t*Move | 3Dモデル回転 | ジョイスティックA | 傾ける |
| s*Move | 3Dモデル移動 | ジョイスティックB | 2個を同じ方向に動かす (=水平移動) |
| zmMove | 拡大縮小 | ジョイスティックB | 2個を逆方向に動かす (=ひねる) |
| fitMode | 全画面表示 | ジョイスティックA | 押し込む |
// mode select
if (fitMode == 0){
modeState = 1;
}
else if (txMove != 0 or tyMove != 0){
if (modeTime > 0){
modeState = 2;
modeTime--;
}
else{
modeState = 0;
}
}
else if (sxMove != 0 or syMove != 0 or zmMove != 0){
if (modeTime > 0){
modeState = 3;
modeTime--;
}
else{
modeState = 0;
}
}
else{
modeState = 0;
}
// screen fit mode
switch (modeState){
case 1:
if (lastModeState != 1){
if (!Mouse.isPressed(MOUSE_MIDDLE)) {
Keyboard.releaseAll();
Mouse.release(MOUSE_MIDDLE);
}
delay(responseDelay);
if (fitMode == 0){
Mouse.press(MOUSE_MIDDLE); // middle button double click
delay(100);
Mouse.release(MOUSE_MIDDLE);
delay(100);
Mouse.press(MOUSE_MIDDLE);
delay(100);
Mouse.release(MOUSE_MIDDLE);
delay(500);
lastModeState = 1;
}
}
break;
// tilt mode
case 2:
if (!Mouse.isPressed(MOUSE_MIDDLE)) {
Keyboard.press(KEY_LEFT_SHIFT);
Mouse.press(MOUSE_MIDDLE);
}
Mouse.move(txMove, tyMove, 0);
xMoved += txMove;
yMoved += tyMove;
lastModeState = 2;
break;
// shift and zoom mode
case 3:
if (!Mouse.isPressed(MOUSE_MIDDLE)) {
Keyboard.releaseAll();
Mouse.press(MOUSE_MIDDLE);
}
Mouse.move(sxMove, syMove, 0);
if (zmMove > zmSens){
Mouse.move(0, 0, 1);
}
else if (zmMove < -zmSens){
Mouse.move(0, 0, -1);
}
xMoved += sxMove;
yMoved += syMove;
lastModeState = 3;
break;
// release and reset
default:
if (Mouse.isPressed(MOUSE_MIDDLE)) {
Keyboard.releaseAll();
Mouse.release(MOUSE_MIDDLE);
}
Mouse.move(-xMoved, -yMoved, 0);
xMoved = 0;
yMoved = 0;
modeTime = modeTimes;
lastModeState = 0;
break;
}
delay(responseDelay);
}
各操作をswich文で切り替えています。
| 場合分け | 目的 | 命令 |
|---|---|---|
| case1 | 全画面表示 | 真ん中ダブルクリック |
| case2 | 3Dモデル回転 | Shift+真ん中ボタン+マウス移動 |
| case3 | 3Dモデル移動&拡大縮小 | 真ん中ボタン+マウス移動 or スクロール |
| その他 | リセット | キー&マウスボタン離す、マウスカーソル移動 |
3Dモデル「回転」と「移動」は命令が重複しており、同時に出せないので
(少なくとも私には方法が分からない....)、切り替えています。
また、画面のマウスカーソルも動いてしまうので、一定時間毎に戻しています。
int readAxis(int thisAxis) {
// read the analog input:
int reading = analogRead(thisAxis);
// map the reading from the analog input range to the output range:
reading = map(reading, 0, 1023, 0, range);
// if the output reading is outside from the rest position threshold, use it:
int distance = reading - center;
// if (abs(distance) < threshold) {
// distance = 0;
// }
if (distance > 0){
distance = distance - threshold;
if (distance < 0){
distance = 0;
}
}
else {
distance = distance + threshold;
if (distance > 0){
distance = 0;
}
}
// return the distance for this axis:
return distance;
}
ジョイスティックのアナログ入力をデジタルに変換、処理しています。
中央位置の遊び(=threshold)をキャンセルする処理方法は少し変更しました。
元のスケッチ例をコメントアウトしているので参考ください。
最後に
最後まで読んでいただき、ありがとうございました。
末尾に参考にさせていただいたブログ記事リンクを記載しました。感謝いたします!
また、自作キーボード(Self-Made Keyboards in Japan)のDiscordにて、カテゴリ違い
気味にも関わらずアドバイスくださった有識者の方々にも、改めて感謝いたします!
◆Hobby Plus:第62回 USBデバイスが作れるArduino?Arduino Pro Micro(Leonardo)でHID機能を使ってみる
◆物を作る者:ジョイスティックとタクトスイッチでマウスを作る
◆K.H.WEBLOG:Arduino Micro を使って、試しに USB スライドパッド マウスを作ってみた(小型USBキーボード自作のための準備色々)