C#でRealSenseから点群データを取得したときの備忘録です.点群の描画にはOpenRCFを使っているので,Unityユーザーの方などはDraw関連のコードを適宜読み替えてください.
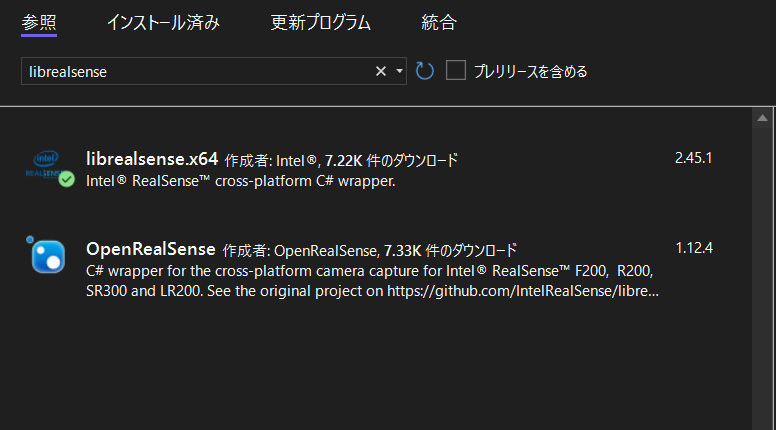
librealsense.x64のインストール
「ツール」→「NuGetパッケージマネージャー」→「ソリューションのNuGetパッケージの管理」→「参照」の中から「librealsense.x64」見つけてインストールする.
初期設定
「Any CPU」を「x64」に変更する.

binフォルダと同じ階層に「realsense2.dll」が自動で生成されているので,それを「bin / x64」フォルダ内の「Debug」または「Release」フォルダ内にコピーする.
RealSenseクラスの作成
ファイルの冒頭に「using Intel.RealSense;」と記入した上で,以下のRealSenseクラスを作成する.
class RealSense
{
Pipeline PipeLine = new Pipeline();
DepthFrame Depth;
RoughRectangle Polygon = new RoughRectangle(0.01f, 0.01f);
public int WidthPointNum = 141;
public int HeightPointNum = 80;
public RealSense()
{
PipeLine.Start();
Polygon.Rotate.SetRx(0.5f * (float)Math.PI);
}
public void Draw()
{
if (Depth != null)
{
for (int i = 0; i < Depth.Width; i += Depth.Width / WidthPointNum)
{
for (int j = 0; j < Depth.Height; j += Depth.Height / HeightPointNum)
{
float d = Depth.GetDistance(i, j);
if (0.02f < d && d < 2.5f)
{
Polygon.Position[0] = 0.0018f * (0.1f + d) * (i - Depth.Width / 2);
Polygon.Position[1] = d;
Polygon.Position[2] = -0.0018f * (0.1f + d) * (j - Depth.Height / 2);
Polygon.Color.SetRGB((byte)(100 * d), 0, (byte)(255 - 100 * d));
Polygon.Draw();
}
}
}
}
}
public void GetDepthData()
{
FrameSet frames = PipeLine.WaitForFrames(100);
if (Depth == null) Depth = frames.DepthFrame;
else Depth.CopyFrom(frames.DepthFrame.Data);
}
}
変数Polygonは点を表す四角形であり,OpenRCFの機能を用いて生成している.Unityユーザーの方などは,適当な四角系で代用されたい.
RealSenseクラスの使用例
OpenRCFのMainWindow.xaml.cs内での実装例.
class RealSense
{
// 前述したので略
}
public partial class MainWindow : Window
{
RealSense RealSense = new RealSense();
void Draw()
{
RealSense.Draw();
}
void Button1_Click(object sender, RoutedEventArgs e)
{
RealSense.GetDepthData();
}
void Button2_Click(object sender, RoutedEventArgs e)
{
Parallel.RunEndless(RealSense.GetDepthData, 100);
}
}
ボタン1を押すと現在のデプスデータを取得する. ボタン2を押すと関数RealSense.GetDepthData()が100msに1回の周期で並列処理(自動で実行)される.上記のコードをOpenRCFで実行した場合,シミュレータ上に以下のような点群データが出現する.

ここでは141×80個の点しか表示していないが,変数WidthPointNum(既定値141),HeightPointNum(既定値80)を大きくすると,より多くの点が表示される.
追記
IMUを搭載したモデルであれば,以下のコードでカメラの姿勢をクォータニオンで取得できます.
PoseFrame poseFrame = frames.PoseFrame;
if (poseFrame != null)
{
float qx = poseFrame.PoseData.rotation.x;
float qy = poseFrame.PoseData.rotation.y;
float qz = poseFrame.PoseData.rotation.z;
float qw = poseFrame.PoseData.rotation.w;
}