本稿では,Azure Kinectから点群データを取得して,点群をOpenRCFのシミュレータに表示する方法を解説します.
OpenRCF自体は下記のサイトからダウンロードできます.
https://mase.openrcf.site
Azure Kinect SDK のインストール
1.「ツール」→「NuGetパッケージマネージャ」→「ソリューションのNuGetパッケージの管理」を開く.
2.参照から「Microsoft.Azure.Kinect.Sensor」を検索し,インストールする.
3.「AnyCPU」→「構成マネージャー」→「x64」に変える.
AzureKinect.csの追加
1.プロジェクト(OpenRCF)を右クリックして,「追加」→「新しい項目」→「クラス」を選び,「AzureKinect.cs」という名前のファイルを追加する.
2.「AzureKinect.cs」に以下のコードを記述する.
C#
using System;
using OpenRCF;
using Microsoft.Azure.Kinect.Sensor;
namespace RobotController
{
class AzureKinect
{
private Device device;
private Transformation transform;
private DeviceConfiguration deviceConfiguration = new DeviceConfiguration();
private Capture capture;
private Image colorImage;
private Image depthImage;
public AzureKinect()
{
deviceConfiguration.DepthDelayOffColor = TimeSpan.Zero;
deviceConfiguration.DisableStreamingIndicator = false;
deviceConfiguration.ColorResolution = ColorResolution.R720p;
deviceConfiguration.DepthMode = DepthMode.NFOV_2x2Binned;
deviceConfiguration.CameraFPS = FPS.FPS15;
deviceConfiguration.ColorFormat = ImageFormat.ColorBGRA32;
deviceConfiguration.SynchronizedImagesOnly = true;
PrickleBall.Position = Position;
PrickleBall.Rotate = Rotate;
Polygon.LineWidth = 0;
Polygon.Rotate = Rotate;
}
private bool isConnected = false;
public void Connect(int deviceNum = 0)
{
if (!isConnected)
{
if (deviceNum < Device.GetInstalledCount())
{
if (Device.GetInstalledCount() < 2) deviceConfiguration.WiredSyncMode = WiredSyncMode.Standalone;
else
{
if (deviceNum == 0) deviceConfiguration.WiredSyncMode = WiredSyncMode.Master;
else deviceConfiguration.WiredSyncMode = WiredSyncMode.Subordinate;
}
try
{
device = Device.Open(deviceNum);
device.StartCameras(deviceConfiguration);
transform = device.GetCalibration().CreateTransformation();
isConnected = true;
Console.WriteLine("Connected to Azure Kinect.");
}
catch (AzureKinectOpenDeviceException ex)
{
Console.WriteLine("Failed to connect Azure Kinect.");
Console.WriteLine(ex.Message);
Console.WriteLine(ex.StackTrace.ToString());
}
}
else
{
Console.WriteLine("Azure Kinect is not found in serial devices.");
}
}
else
{
Console.WriteLine("Azure Kinect is already connected.");
}
}
private BGRA[] pointColors = new BGRA[0];
private Short3[] pointPositions = new Short3[0];
public void UpdatePointCloud()
{
if (isConnected)
{
capture = device.GetCapture();
colorImage = transform.ColorImageToDepthCamera(capture);
depthImage = transform.DepthImageToPointCloud(capture.Depth);
pointColors = colorImage.GetPixels<BGRA>().ToArray();
pointPositions = depthImage.GetPixels<Short3>().ToArray();
capture.Dispose();
colorImage.Dispose();
depthImage.Dispose();
}
}
private PrickleBall PrickleBall = new PrickleBall(0.035f);
private Cuboid Camera = new Cuboid(0.103f, 0.04f, 0.1254f);
private Rectangle Polygon = new Rectangle(0.01f, 0.01f);
public Vector Position
{
get { return Camera.Position; }
set { Camera.Position = value; }
}
public RotationMatrix Rotate
{
get { return Camera.Rotate; }
set { Camera.Rotate = value; }
}
public bool IsDrawEnabled = true;
public void Draw()
{
PrickleBall.Draw();
Camera.Draw();
if (IsDrawEnabled)
{
float[] vector = new float[3];
for (int i = 0; i < pointPositions.Length; i++)
{
if (250 < pointPositions[i].Z && pointPositions[i].Z < 6000)
{
vector[0] = 0.001f * pointPositions[i].X;
vector[1] = 0.001f * pointPositions[i].Y;
vector[2] = 0.001f * pointPositions[i].Z;
Polygon.Position.Set = Position.Plus(Rotate.Times(vector));
Polygon.Color.SetRGBA(pointColors[i].R, pointColors[i].G, pointColors[i].B, 0);
Polygon.Draw();
}
}
}
}
}
}
AzureKinect.csの使い方
例えば,MainWindow.xaml.cs内に次のように記述する.
C#
AzureKinect AzureKinect = new AzureKinect();
void Draw()
{
AzureKinect.Draw();
}
void Button1_Click(object sender, RoutedEventArgs e)
{
AzureKinect.Connect();
}
void Button2_Click(object sender, RoutedEventArgs e)
{
Parallel.RunEndless(AzureKinect.UpdatePointCloud, 100);
}
void Button3_Click(object sender, RoutedEventArgs e)
{
AzureKinect.IsDrawEnabled = !AzureKinect.IsDrawEnabled;
}
void Button4_Click(object sender, RoutedEventArgs e)
{
AzureKinect.Position[2] = 1;
AzureKinect.Rotate.SetRollPitchYaw(-0.5 * Math.PI, 0, -0.5 * Math.PI);
}
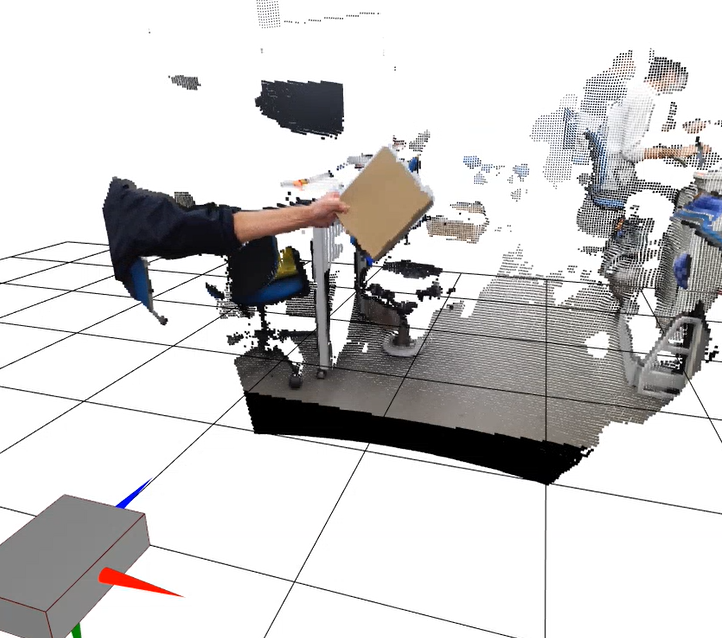
ボタン1を押すと Azure Kinect と接続し,ボタン2を押すと100msごとに点群データが更新される.ボタン3を押すと描画のオン-オフが切り替わる.全ての点群を描画するのは非常に重い処理なので,描画をする必要がない場合はオフにしておいた方がよい(常にオンだとPCが発熱する).ボタン4を押すと Azure Kinect の位置・姿勢が設定され,それに応じて点群データの表示位置も更新される.実行すると,以下のように点群データ(色付き)がシミュレータ上に表示される.