前置き
電子工作素人の私ですが、ドローン(正確にはクアッドコプター)を自作しようと思って色々調べています。
今回はドローンの頭脳であるフライトコントローラの一つであるPixracerについての解説です。
フライトコントローラは様々なものが販売されているのですが、
ドローンのオープンソースであるDroneCodeのマニュアルサイトで紹介されていたなか、小型&軽量かつ基盤むき出しで色々学び取るのに良さそう、ということでこのPixracerを選択しました。
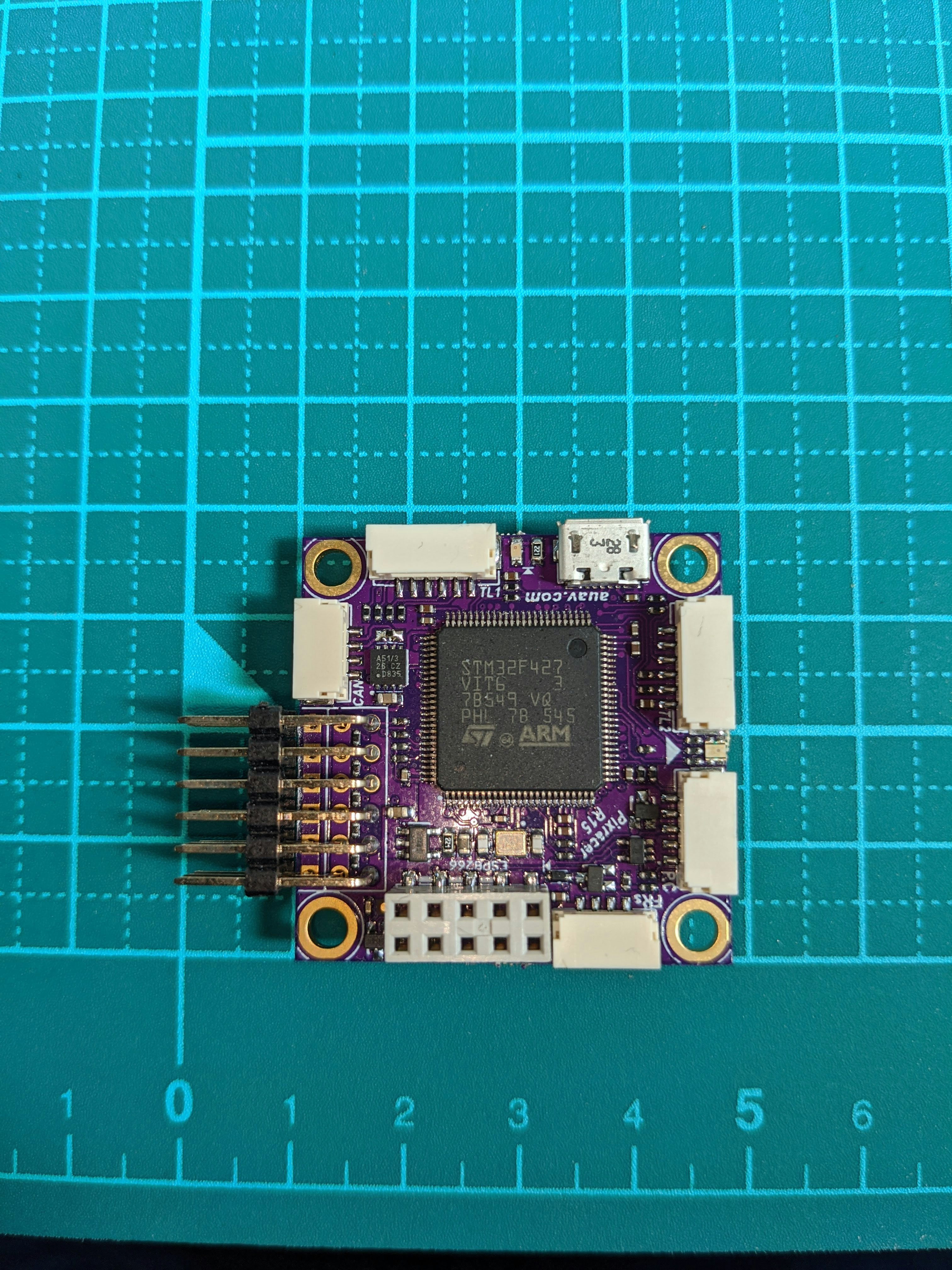
こういう基盤です。
参考:
Pixracer(DroneCodeのページ)
Pixracer(RC Groupというフォーラムの解説投稿)
購入先サイト(mRobotics)
この記事では主に以下について解説します。
- Pixracerの基本スペック
- Pixracerのコネクター群のリストアップと用途
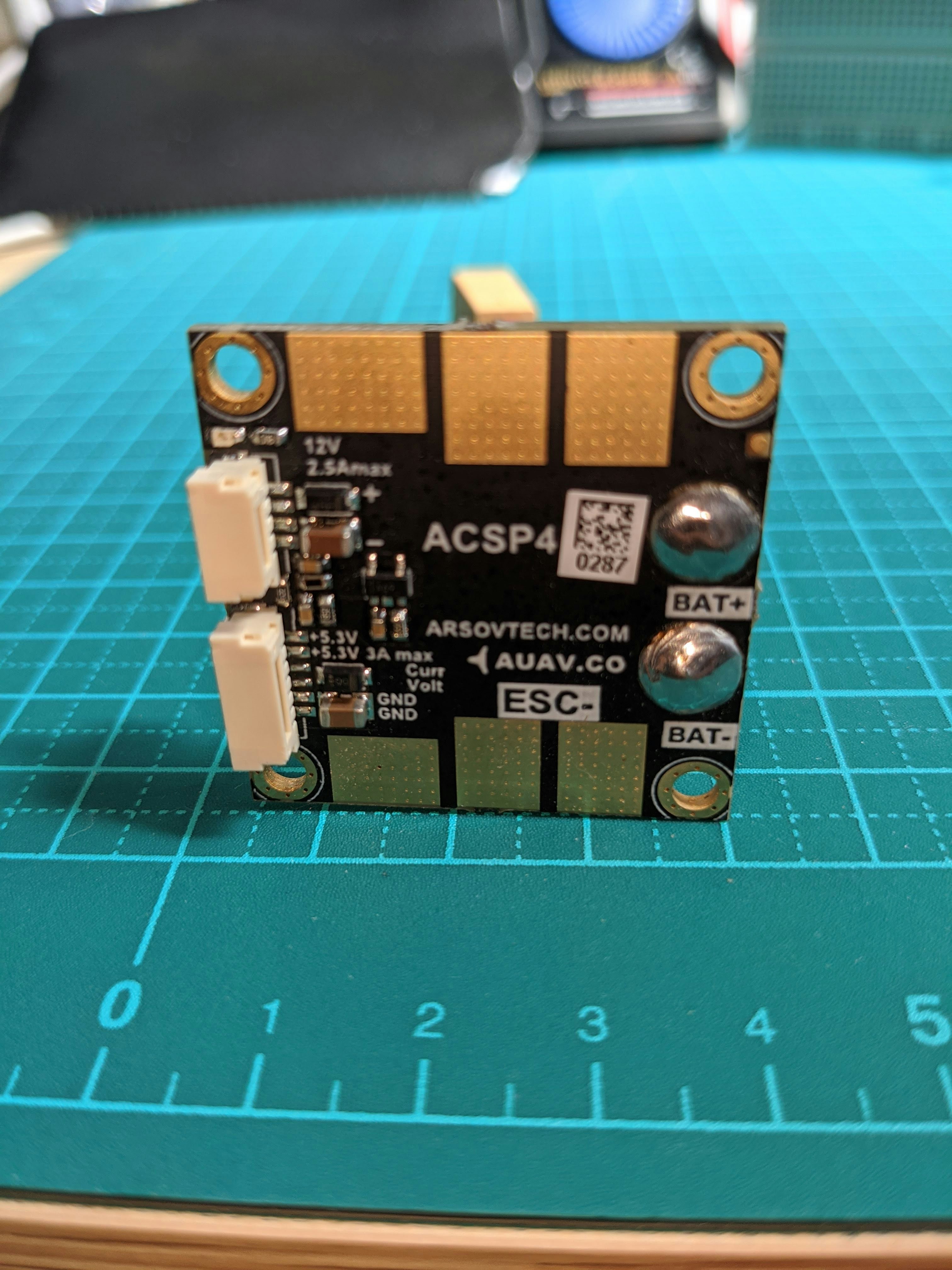
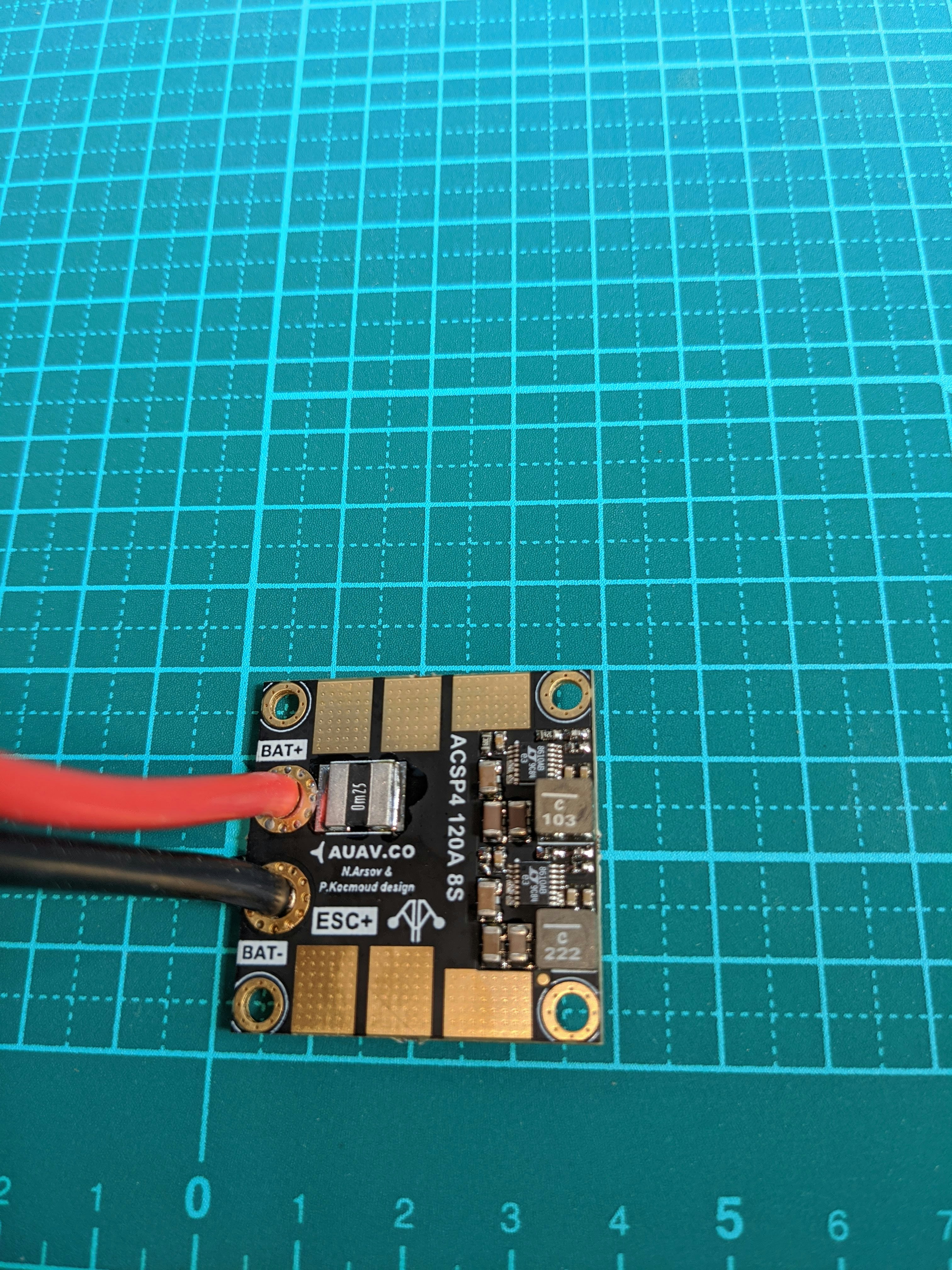
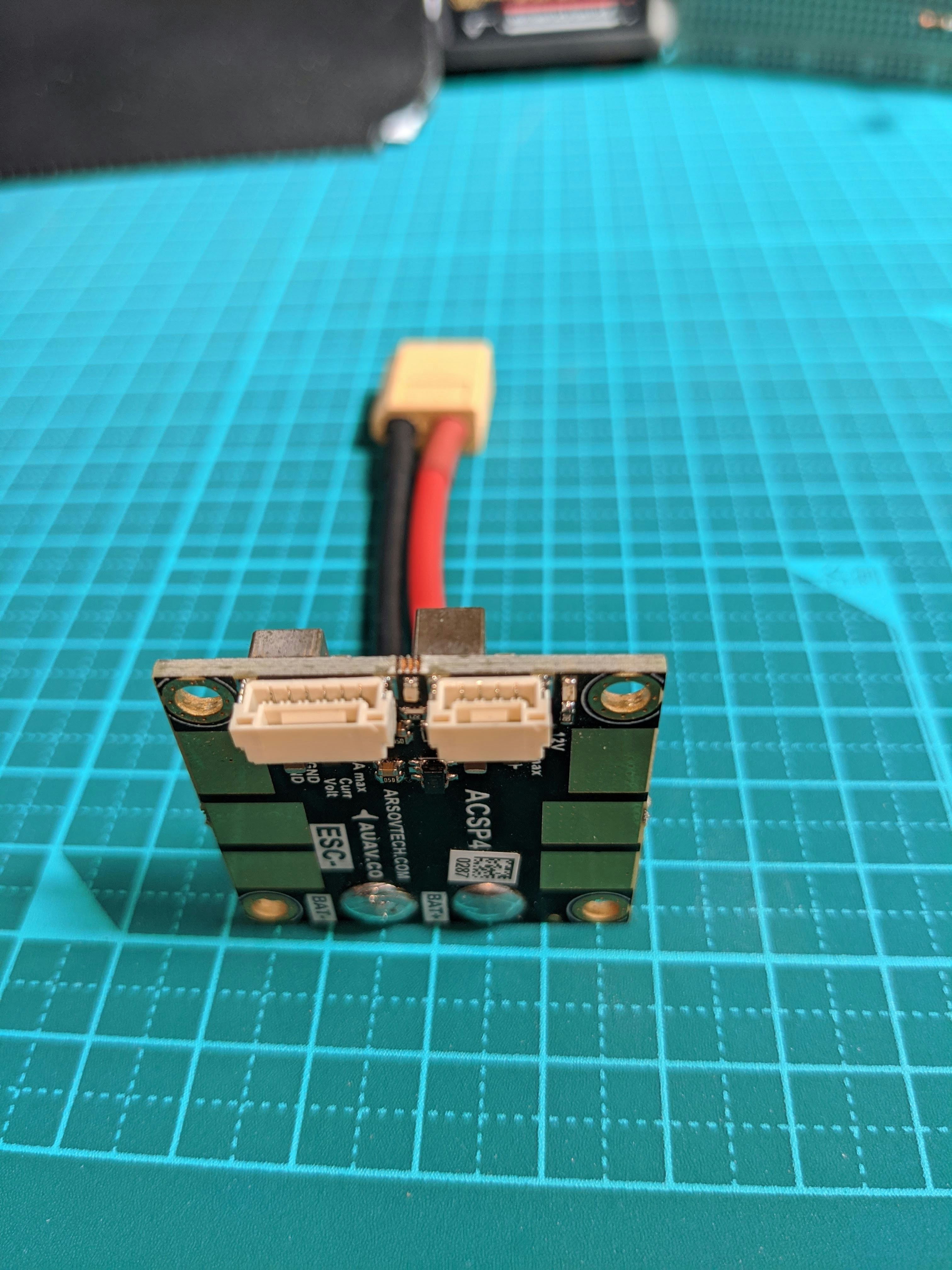
- 関連部品の電源基板
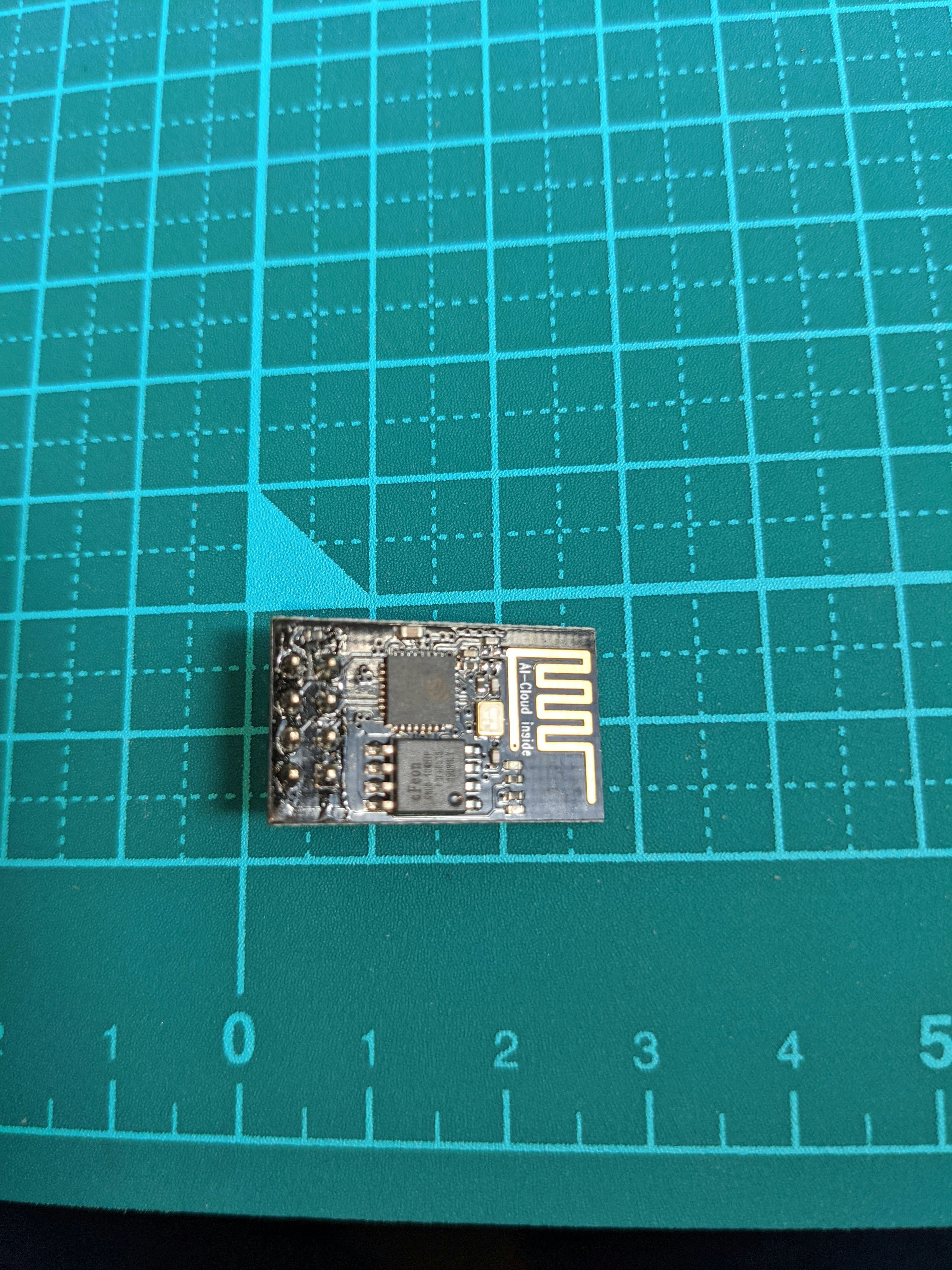
- 関連部品のWiFi基板
また以下についてはここでは扱いません。
- Pixracerの使い方
- ソフトウェアの設定方法
- 組み立て方
(これらはそのうち記事にしたいです。)
Pixracerの基本スペック
ここでは一部のみ記載します。詳細はこちらなどを見てください。
大きさ:36mm x 36mm
重さ 10.54g
CPU:180 MHz (ARM Cortex M4 with single-presition FPU)
メモリ:256KB SRAM(L1)
外部メモリ:
- FRAM 256Kbit(FM25V02-G)
- SDカード
入力電圧:
5V
センサー
MPU9250
- 3軸加速度&ジャイロセンサー&方位磁石
ICM-20602 or ICM-20608 (ロットによってどちらかが実装されている模様)
- 3軸加速度&ジャイロセンサー
MS5611
- 気圧計
ST LIS3MDL
- 方位磁石
参照:
MPU9250
ICM-20602
ICM-20608
MS5611
ST LIS3MDL
加速度計や方位磁石のモジュールが重複して実装されてるのはなんでなんでしょうか?
精度や安定性向上のためですかね?
コネクタ
表面
JST-GH 4pin x2
JST-GH 5pin x1
JST-GH 6pin x2
Micro USB Type-B x1
2x5 pin hole
3x6 pin
裏面
JST-GH 5pin x1
JST-GH 6pin x2
JST SM06B x1
Micro SD Card slot x1
それぞれの用途等
詳細は
https://docs.px4.io/master/en/flight_controller/pixracer.html#pinouts
を参照してください。以下には概略のみ記載します。
表面 JST-GH 4pin 1つ目
主にCAN通信に利用
表面 JST-GH 4pin 2つ目
FrySky Telemetry Port
https://docs.px4.io/master/en/flight_controller/pixracer.html#frsky-telemetry--serial4
FrySky社のプロトコルで、ドローンの状態をプロポに送信するために利用します。
表面 JST-GH 5pin
RC Input (accepts PPM / S.BUS / Spektrum / SUMD / ST24)
プロポからの操作コマンドを受け取る口です。
https://docs.px4.io/master/en/flight_controller/pixracer.html#rc-input-accepts-ppm--sbus--spektrum--sumd--st24
表面 JST-GH 6pin 1つ目
Telemetry
https://docs.px4.io/master/en/flight_controller/pixracer.html#telem1-telem2osd-ports
表面 JST-GH 6pin 2つ目
Telemetry
https://docs.px4.io/master/en/flight_controller/pixracer.html#telem1-telem2osd-ports
(1つ目とおおよそ同じ)
表面 Micro USB Type-B
PCとの接続に利用
表面 2x5 pin hole
WiFiモジュールとの接続に利用
このWiFiはテレメトリや、ファームウェアアップデートなどに利用します。
参考:ESP8266 WiFi module
表面 3x6 pin
ESCをコントロールするために利用
- 各3ピン毎に一つのESCに接続します
- 3つのピンはそれぞれ、制御信号(PWM),Servo,GNDです。
裏面 JST-GH 5pin
SaftySwitchやPiezo端子(ブザー)に接続
裏面 JST-GH 6pin 1つ目
I2C通信とUSART通信でGPSデバイスに接続
裏面 JST-GH 6pin 2つ目
電源入力口
裏面 JST SM06B x1
Pixhawk Debug Port
http://dev.px4.io/master/en/debug/system_console.html#pixhawk_debug_port
裏面 Micro SD Card slot x1
その他参考
5x UART (serial ports), one high-power capable, 2x with HW flow control and GPS+I2C®
CAN
Spektrum DSM / DSM2 / DSM-X® Satellite compatible input up to DX9 and above.
Futaba S.BUS® & S.BUS2® compatible input
FRSky Telemetry port output
Graupner SUMD
Yuneec ST24
PPM sum input signal
OneShot PWM output (Configurable)
RSSI (PWM or voltage) input
I2C
SPI
External microUSB port
JTAG
Dronecode Debug connector
WiFi Telemetry & firmware update via ESP8266 (Included!)
6x PWM outputs
JST-GH connectors using Dronecode connector standard
疑問1:Telemetryが2つとFrySkyとRC Input、と通信用っぽいコネクタが複数あるけど、それぞれ何なのか?
Telemetryが2つある理由はまだ良くわかってないですが、、、
- FrySkyはFrySky社の専用プロトコルでテレメトリするもので、FrySky社のモジュールを接続します
- テレメトリとRC Inputは、全く違うもので、テレメトリはドローンの状態を遠隔でチェックするためのもの、RC Inputはプロポからの操作信号を受け取るためのものです。
疑問2:Safety Switchってなんなのか?どうやって使うものなのか?
このスイッチをONを使って、モーターとサーボへの出力をON/OFFするものらしいです。
詳細説明を見つけられなかったが、以下の動画をみると長押しでON/OFFになる?
https://www.youtube.com/watch?v=iF4ZGx5QM3A
イメージ集
Pixracer
表面





裏面





WiFi基盤 ESP-01 ESP8266
電源管理基盤 ACSP4