はじめに
ETロボコンシミュレータの超音波センサーに機能拡張を行いました。
動作の前提事項
- ETロボコンシミュレータの環境構築すること
- ARM版マイコンシミュレータで動作させること
環境の構築方法については、以下を参照してください。
超音波センサの実装
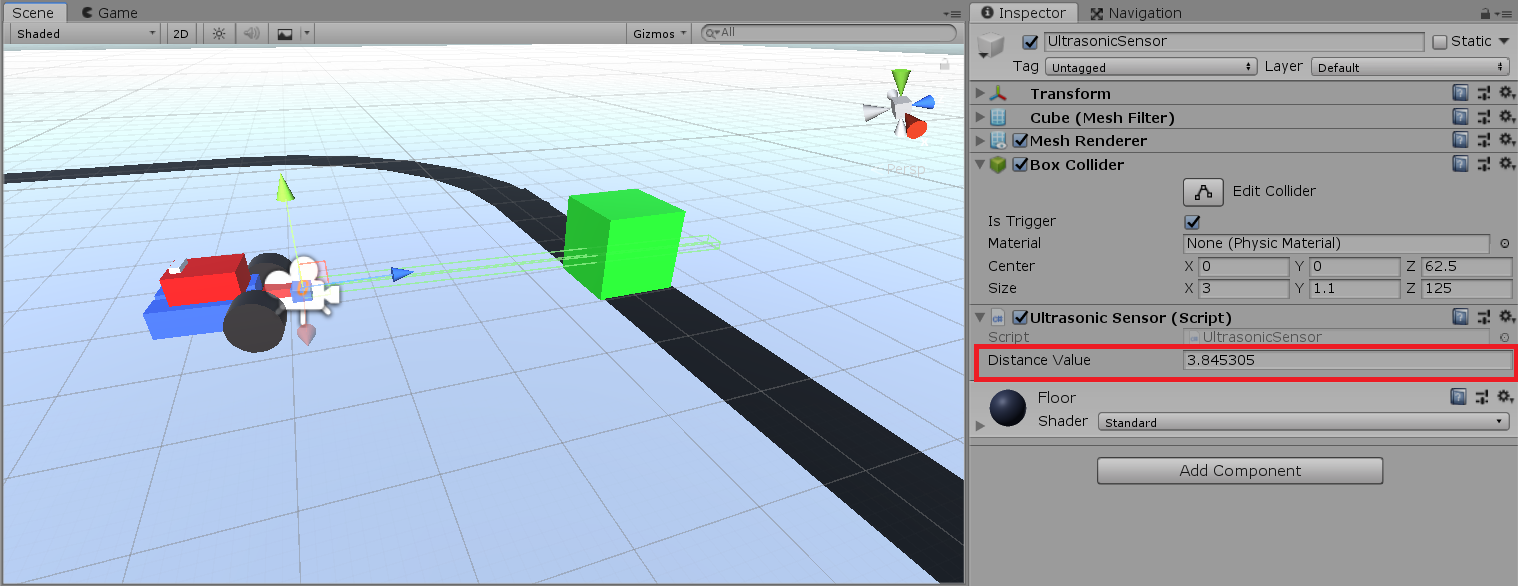
UltrasonicSensor.cs
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class UltrasonicSensor : MonoBehaviour
{
private float contact_distance;
public float distanceValue;
// Start is called before the first frame update
void Start()
{
contact_distance = 255;
}
// Update is called once per frame
void Update()
{
//nothing to do
}
public void UpdateUltrasonicSensor()
{
this.distanceValue = contact_distance;
}
private void OnTriggerStay(Collider other)
{
GameObject FrontSensor = GameObject.Find("UltrasonicSensor");
Vector3 Apoint = FrontSensor.transform.position;
Vector3 Bpoint = other.gameObject.transform.position;
// Distance between Sensor and Object
contact_distance = Vector3.Distance(Apoint,Bpoint);
}
}
Colliderがオブジェクトに接触するとオブジェクトと,超音波センサとの距離を取得します。
athrill側で、ev3_ultrasonic_sensor_get_distance (sensor_port_t port)を呼び出すことで、
unity上の超音波のセンサ値を取得することができます。
動作確認
unityをシミュレーションモードにして、
WSL上で、以下のコマンドを実行してください。
$ cd athrill-sample/ev3rt/ev3rt-beta7-release/asp_arm/sdk/OBJ1.1
$ make clean
$ make
$ athrill2 -c1 -m memory.txt -d device_config.txt -t -1 asp
