前回はscenkitを使って、ipadに合わせて直方体をグルグルさせましたが、
今回はmotionセンサで取得したデータをグラフ表示させてみます。
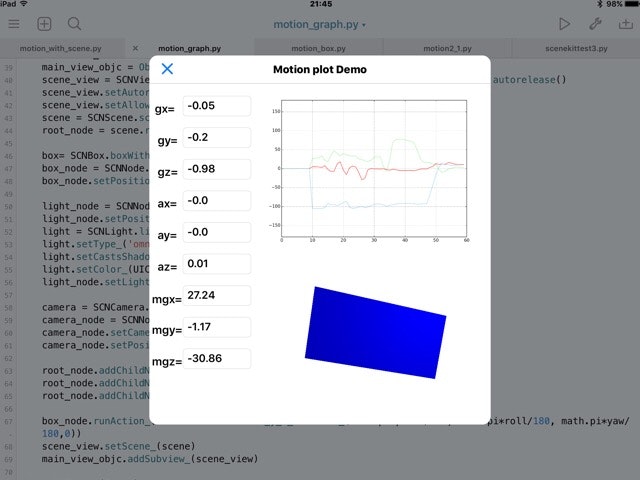
Pythonistaのuiを使って、pitch,roll,yawの遷移グラフとscenkitを使ったiPadの動きと連動した直方体を表示させます。
pyuiのイメージは次のような画面です。
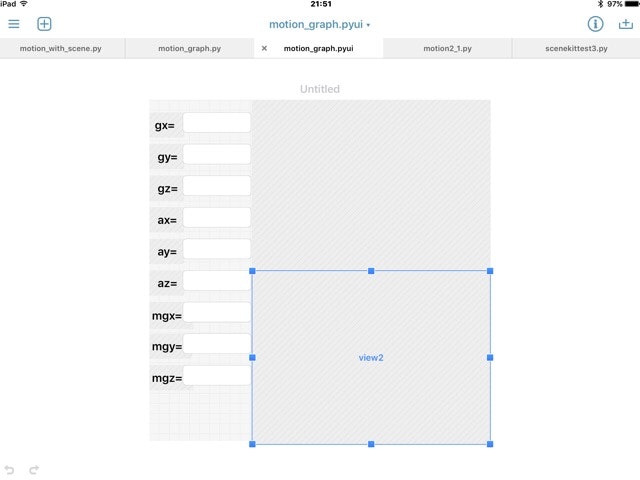
サブviewとしてimage viewのimageview1とcustom viewのview2を用意します。
加速度、ジャイロ、磁気センサ表示用のtextBoxも準備しておきます。
今回、textboxの名前は、加速度は、ax,ay,az、ジャイロはgx,gy,gz、磁気センサはmx,my,mzにしています。
描画用のソースは以下のとおり。
motion_graph.py
# coding: utf-8
# For use in pythonista on iOS
from objc_util import *
import ui
import motion
from scene import *
import math
import numpy as np
import time
import ioView
import matplotlib.pyplot as plt
import Image
import sys
import os
from matplotlib.ticker import *
# boxの大きさ
scale = 40
W=3
L=1.5
H=0.5/2
pitch,roll,yaw=0.0,0.0,0.0
ax,ay,az=0.0,0.0,0.0
gx,gy,gz=0.0,0.0,0.0
mgx,mgy,mgz=0.0,0.0,0.0
load_framework('SceneKit')
SCNView, SCNScene, SCNBox, SCNText, SCNNode, SCNLight, SCNCamera, SCNAction, SCNTransaction,UIFont= map(ObjCClass, ['SCNView', 'SCNScene', 'SCNBox', 'SCNText', 'SCNNode', 'SCNLight', 'SCNCamera', 'SCNAction','SCNTransaction','UIFont'])
class SCNVector3 (Structure):
_fields_ = [('x', c_float), ('y', c_float), ('z', c_float)]
@on_main_thread
class Sceneobj(object):
def __init__(self):
self.name = ""
def make_view(self,mv):
global pitch,roll,yaw
global box_node
self.main_view=mv
main_view_objc = ObjCInstance(main_view['view2'])
scene_view = SCNView.alloc().initWithFrame_options_(((0, 0),(400, 400)), None).autorelease()
scene_view.setAutoresizingMask_(18)
scene_view.setAllowsCameraControl_(True)
scene = SCNScene.scene()
root_node = scene.rootNode()
box= SCNBox.boxWithWidth_height_length_chamferRadius_(W, L, H, 0)
box_node = SCNNode.nodeWithGeometry_(box)
box_node.setPosition_((0, 1, 0))
light_node = SCNNode.node()
light_node.setPosition_((1.5, 1.5, 1.5))
light = SCNLight.light()
light.setType_('omni')
light.setCastsShadow_(True)
light.setColor_(UIColor.blueColor().CGColor())
light_node.setLight_(light)
camera = SCNCamera.camera()
camera_node = SCNNode.node()
camera_node.setCamera(camera)
camera_node.setPosition((0, 0, 5))
root_node.addChildNode_(camera_node)
root_node.addChildNode_(box_node)
root_node.addChildNode_(light_node)
box_node.runAction_(SCNAction.rotateToX_y_z_duration_(math.pi*pitch/180, math.pi*roll/180, math.pi*yaw/180,0))
scene_view.setScene_(scene)
main_view_objc.addSubview_(scene_view)
class MyScene (Scene):
def setup(self):
global fig,ax1
#motionセンサスタート
motion.start_updates()
# data initial
self.py = [pitch for i in range(0, 60)] # pitch array setup
self.ry = [roll for i in range(0, 60)] # roll array setupr
self.yy = [yaw for i in range(0, 60)] # yaw array setup
self.xl = [i for i in range(0, 60)] # x_line
# graph set up -------------------------#
ymin=-180
ymax=180
fig = plt.figure() # graphics setup
ax1 = fig.add_subplot(111) #
ax1.grid(True) # axis
plt.ylim(ymin, ymax)
def draw(self):
global box_node,box
global pitch,roll,yaw,ax,ay,az,gx,gy,gz
global main_view
global ax1,fig
#処理が追い付かないのでタイマーをいれる
#time.sleep(0.01)
#加速度、ジャイロの値を更新
ax,ay,az = motion.get_user_acceleration()
gx,gy,gz= motion.get_gravity()
gravity_vectors=motion.get_attitude()
mgx,mgy,mgz,mga=motion.get_magnetic_field()
pitch, roll, yaw = [x for x in gravity_vectors]
# ラジアン→度へ変換
pitch=-pitch*180/3.1415926
roll=roll*180/3.1415926
yaw=-yaw*180/3.1415926
#再描画
box_node.runAction_(SCNAction.rotateToX_y_z_duration_(math.pi*pitch/180, math.pi*roll/180,-math.pi*yaw/180,0))
#加速度、ジャイロ、地磁気センサーの値を表示
main_view['ax'].text=str(round(ax,2))
main_view['ay'].text=str(round(ay,2))
main_view['az'].text=str(round(az,2))
main_view['gx'].text=str(round(gx,2))
main_view['gy'].text=str(round(gy,2))
main_view['gz'].text=str(round(gz,2))
main_view['mx'].text=str(round(mgx,2))
main_view['my'].text=str(round(mgy,2))
main_view['mz'].text=str(round(mgz,2))
# graphics
self.py.pop(0); self.ry.pop(0); self.yy.pop(0) # left
self.py.append(pitch); self.ry.append(roll); self.yy.append(yaw)# add data
ax1.plot(self.xl, self.py, color='lightgreen', lw='1') # pitch graph
ax1.plot(self.xl, self.ry, color='red', lw='1') # roll graph
ax1.plot(self.xl, self.yy, color='skyblue', lw='1') # yaw graph
plt.savefig('rt.png') # save the graph on the consolen
main_view['imageview1'].image = ui.Image.named('rt.png') # imageview
plt.cla() # clear graph
plt.close() # close graph
fig = plt.figure() #
ax1 = fig.add_subplot(111) #
ax1.grid(True)
ymin=-180
ymax=180
plt.ylim(ymin, ymax)
if __name__ == "__main__":
main_view = ui.load_view()
main_view.name = 'Motion plot Demo'
my_scene = MyScene()
scene_view = SceneView(frame=main_view.bounds, flex='WH')
main_view['view2'].add_subview(scene_view)
scene_view.scene = my_scene
scene_kit=Sceneobj()
scene_kit.make_view(main_view)
main_view.present('sheet')
リアルタイムグラフの作成は、macsbugさんのDisplay the graph on the iPadを参考にコーディングしました。
ほぼほぼコピペです。
Matplotlibでの描画が画像を保存して、再表示なので遅いです。
次回はGenuino101のimuとbleを使って遊びたいと思います。