micro:bitで2軸カメラマウントのコントロール
micro:bitにサーボモータを2つ使った2軸カメラマウントを繋いでコントロールしてみた。
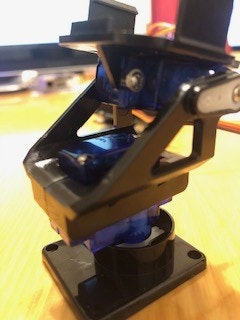
2軸カメラマウント
SG90というサーボモータを使ってコントロール出来るカメラマウント
を使ってみた。
マウントキットとしての出来はいまいちな感じ。
- 見本通りに組み立てると、モーター2つがぶつかり雲台が平行にならない
->下のモーターはケースの外側にはみ出すように配置するといい(固定してない) - サーボモータのアームは細くするなど加工が必須
->カッターで細く削ったり短く切る必要がある - モーターを固定するためにネジをきっちり締めるとモーターが雲台にぶつかって歪む
->ネジを途中までしか閉めない。スペーサーをかませればいいんだけど・・・
と問題はあるが、一応組み上がった。
組み立てはここを参考に
モーターのセンター位置がわからなかったので、一度組み立ててmicro:bitのプログラムでセンター出しをしてから、再度水平になるように組み直した。
組む前にmicro:bitと繋いでセンター出しすれば良かった。
モータードライバと電池ボックス
kitronikのServo:Liteを使った。
製品情報と仕様はこちら
- 単4電池3本でモーターの電源とmicro:bitの電源をまかなえる。
- P1端子とP2端子にサーボモータを繋げられるようになっている。
- P0端子には色を変えられるLEDが5つ。
- micro:bitとはネジで5つの端子を直結できる。
- On/Offのスライドスイッチ付き。
しかし、買ってみると本体と接続ネジだけが入っていてマニュアルが一切ついていない。
使い方はホームページを見ないといけない・・・
micro:bitのプログラム
micro:bitの加速度センサーを利用して、
- 左右に傾ける(role)とその角度に応じて雲台を左右に向ける。
- 上下に傾ける(pitch)とその角度に応じて雲台を上向き下向けに傾ける。
というプログラムを作った。
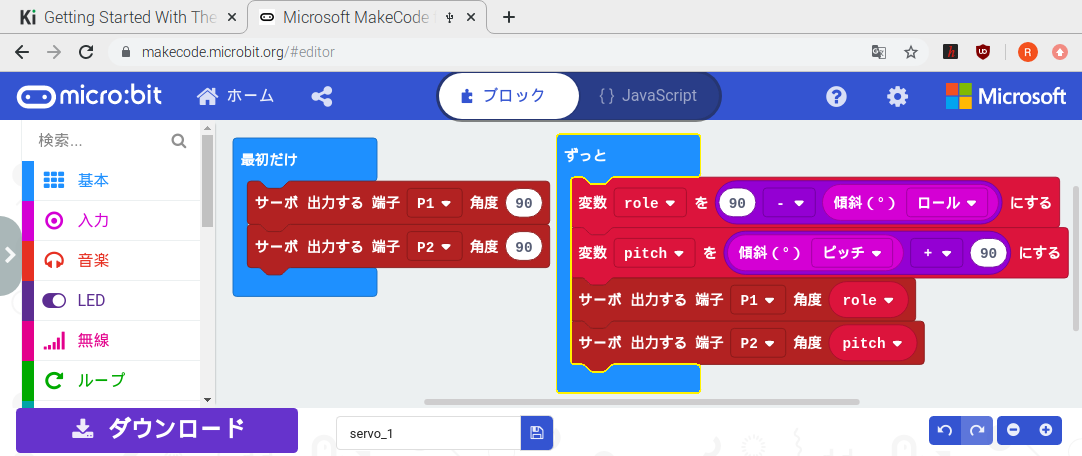
サーボモータは0〜180度まで任意の角度に保持できるので、電源を入れたときに中心(=90度)にする。
この位置で水平に近くなるように雲台を組み上げておく。
あとはmicro:bitのセンサー値をモーターに与えるだけ。
実行
実行するとこんな感じで、micro:bitの傾きに応じて雲台が動くようになった。