プログラミング・フォロ
micro:bitを内蔵して6本足で自律して歩き回ることの出来る プログラミング・フォロを組み立てて動かしてみました。
組み立て
プラモデルなので、ニッパで切り出してカッターでバリを取って、説明書を見ながら組み立てるだけ。
出来上がるとこんな感じに。

胴の部分にモーターとギアボックスがあり、頭の部分に電池Boxとモータードライバと赤外線センサーとスピーカーがある。
横にあるのがmicro:bitで、フォロの顔の部分にはまるようになっている。
腕はあるけどモーターでは動かないのはちょっと残念。
プログラミング
micro:bitへのプログラミングはMakeCodeを使う。
今回は Raspberry Pi 4 上でMakeCodeを使ってみた。
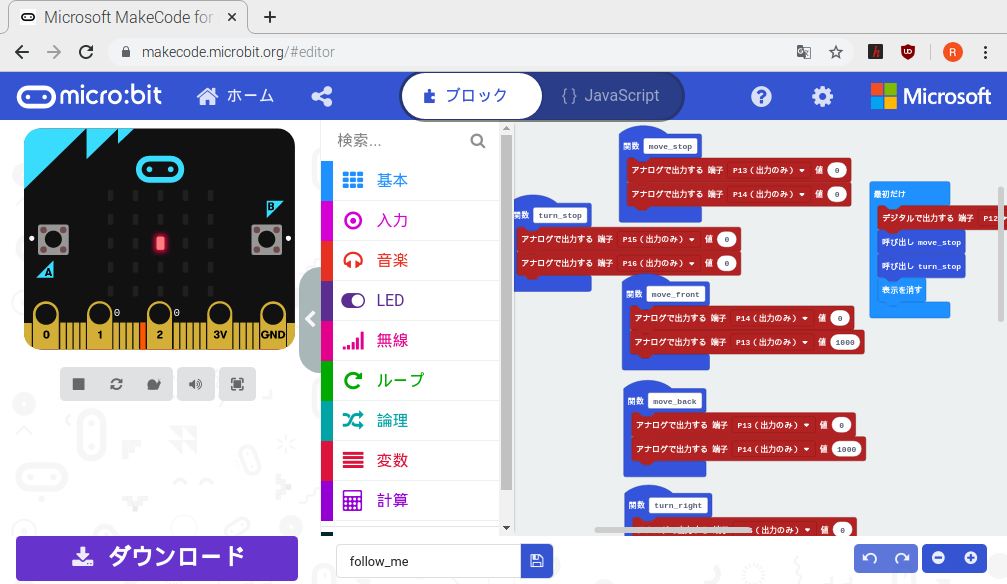
プログラミング・フォロのHPにあるように、顔の部分に来るLEDを光らせるサンプルをMakeCode上で作り、ファイルをダウンロードする。ダウンロードしたファイルは ~/Downloads ディレクトリに xxx.hex というファイル名でダウンロードされる。
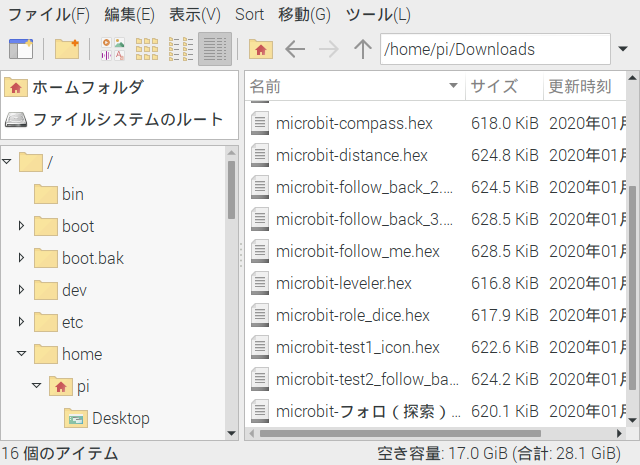
Raspberry Pi にmicro:bitをUSBで接続すると、micro:bitが自動でマウントされるので、ダウンロードしたファイルをmicro:bitのディレクトリにコピーする。コピーが終わると micro:bit がアンマウントされ、自動で再起動がかかり、すぐに作ったプログラムが実行され、顔が表示される。
micro:bitをRaspberry Piからはずし、フォロにセットしてスイッチを入れるとちゃんと顔が表示された。
ちゃんとプログラミングして動くことがわかったので、次は探索プログラムをダウンロードしてmicro:bit上へコピーして、フォロにセットする。
フォロの電源を入れると前へ歩き出し、壁の近くまで行くと少しバックして回転してまた前に歩き始めた。
ちゃんと赤外線センサーも反応してるし、前後の移動も回転も動いてくれた。