(2023年12月6日)ロボカップジュニア京都ノード レスキューLINEリーグ
機体仕様
大きさ: (底面,高さ)=(185mm^2,85mm) (アーム除)
駆動:4駆 タミアのタイヤ(56mm径)
トレース:機体底面前方に魚眼カメラ(万色LED付)
障害物等:4面各2個(前+1)のvl53l0x
回収機構:小型アーム(サーボx3駆動) 物体検知用カメラ
保持・投下機構:なし
電源:18650電池x3
機体設計詳細
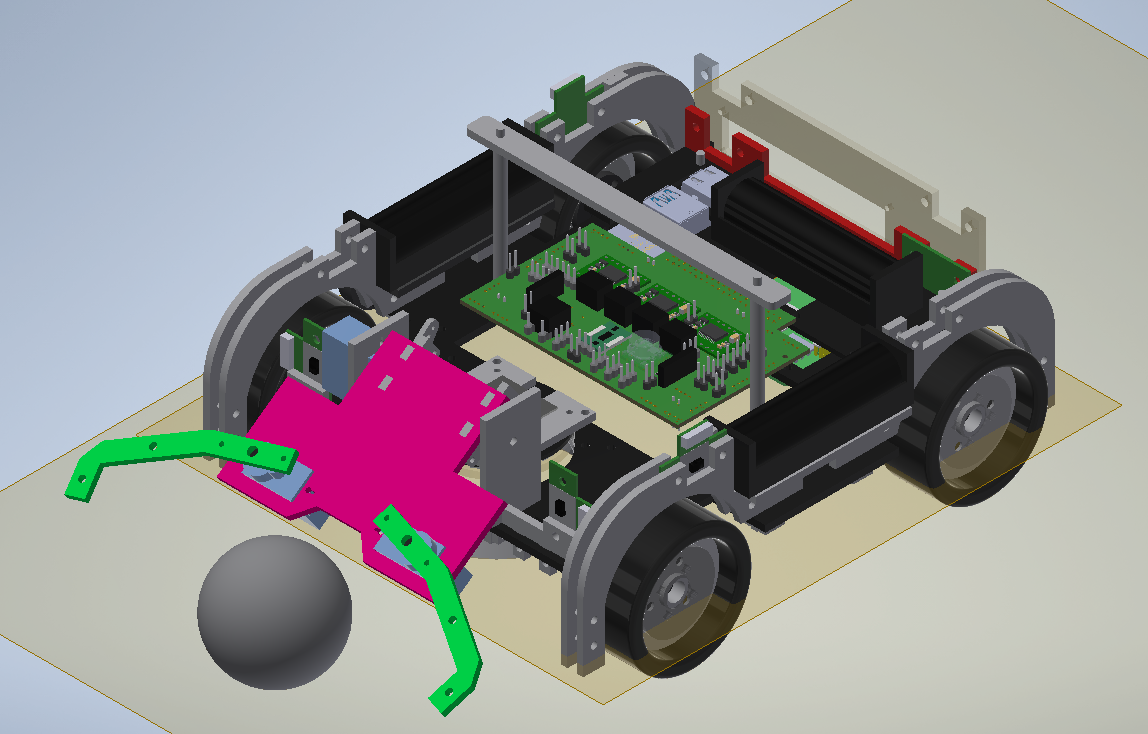
機体CAD (inventor2023で作成) (蛍光カラーなのは通常色だと見えづらいから)
新設計:基板を従来の半分の大きさに詰め、機体底面に設置。
駆動、底面カメラ
昨年は超新地旋回の精度の低さに悩まされたが、そもそも制御が求める精度が高すぎるという点があった。制御側の都合で、機体前方に広角カメラがあった方が良いとなったので、結局旋回性能の問題は解消していない。加工制度、個体差、タイヤのグリップ力、機体重心など多くの要素が絡むので、ある程度までは仕方ないのかもしれない。
回収機構
新ルール:救助ゾーン色分け要素追加に伴い、回収保持投下機構の必要性を考察。
旧ルールでは、特別の機構を載せずとも、被災者をまとめて押し転がすことでエリアlv1に入れることができたが、被災者の色ごとに対応色のエリアに入れることが必須となった新ルールでは、それができなくなった。
エリアlv2を選択するなら、回収機構は必須。
黒銀の選別をする必要がある上、玉を探すのに向いているため、カメラを置きたい。
カメラを使うなら、玉の位置把握ができるはずなので、回収機構は狭範囲なものでも構わない。
また、色分け必須の都合上、保持機構は大掛かりになる。保持投下機構を組み込むと多少の時間短縮を図ることが出来るが、機体が小さい事のメリットの方が大きいと考えた。
以上の考えから、回収機構:カメラ付きアーム、保持投下機構:なし という設計に至った。
がれき避け
がれき:~3mmまでの小さな物体。固定されない。
バンプ:~10mmまでの物体。固定される。
3mmのものは防ぎ、10mmのものは通過するようなシールドを作らなければならない。どういうこと?。
なんらかとてもやわらかい物質で制作するべきだろう。そこで、100均で買ったクイックルワイパーの先のようなものを利用した。

ライン認識側:カメラ に影響を与えないための対策はこれで十分だろう。
ただ、がれき対策で最も重要なのは、駆動側のスリップ対策である。
駆動機構によっては、ライン認識のずれ以前に、まともに走るのが困難になる。
避けを設けた上でがれき走行が上手くいかない場合、駆動を見直すことも必要だ。
実際、この機体は直線上ならほとんどのがれきを防ぐことができ、多少画角に入ってもある程度ならライン認識ができたが、スリップが酷く、結果がれきはかなり苦手だった。のちのタイヤ変更によって改善した。
結果
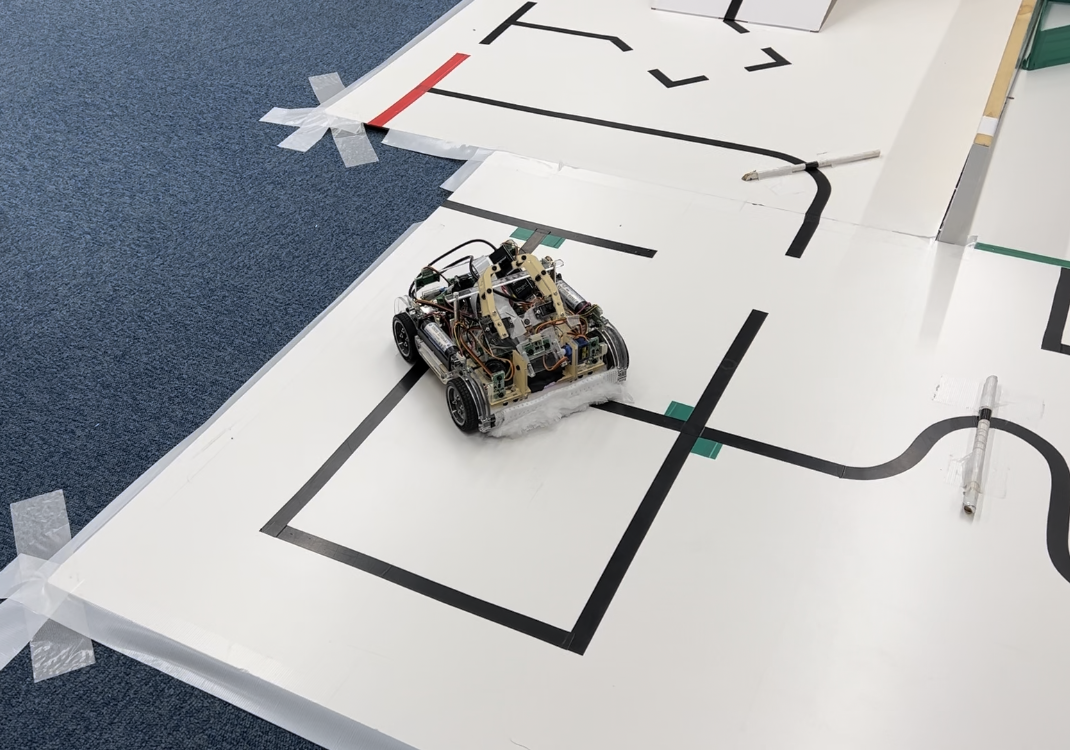
コート

第一走 218点
(得点詳細)
第二走 282点
(得点詳細)
振り返り
良かった点
・通常ライン,ギャップ,交差点カンペキ
基本的なライントレースは完璧にできていた。
・案外がれき避けが有効
カメラに入れないという点では上出来。あとは駆動性能。
・取捨選択の判断 機体性能を把握できていた
できるかどうか分からない斜めバンプを捨て、できるだけ乗数を得られるようにしつつ、確実に点の取れる交差点エリアを完走できるように時間配分した。
問題点
・バンプかなり苦手
既述の通り。
・障害物回避 遅いし低精度
(雑距離調整,前進)を繰り返すアルゴリズムが微妙。Pぬるぬる制御したい。
・避難ゾーン不安定
未熟な点が多い。ハード的問題もあるか?不明瞭。
・全体的に遅い…?
通常ライントレース側の移動速度など調整していきたい。
今後
1.障害物回避、段上旋回の解決のために、機体を小型化する(設計済みのため組み立てのみ)。
2.そういえば試してみたかったスパイクタイヤを試してみる。バンプ,がれき走破性能上昇を期待。
3.避難ゾーンについては完全に未実装のものもあるので、書き進めていく。
4.ひたすら
〇早急にハード側の問題点を洗い出し、修正解決を目指す。
〇苦手そうな地形を見つけて修正。
〇時間短縮を目指す。