ETロボコン活動の中で検討・調整を助けてくれるデバッグツールについて紹介します。
写真はチャンピオンシップ大会でのデモ走行終了後の様子です。
東海地区実行委員会Dummy Systemなどと銘打っていますが、現役時代にチームで使用していたツールを改造しながら使い続けています。
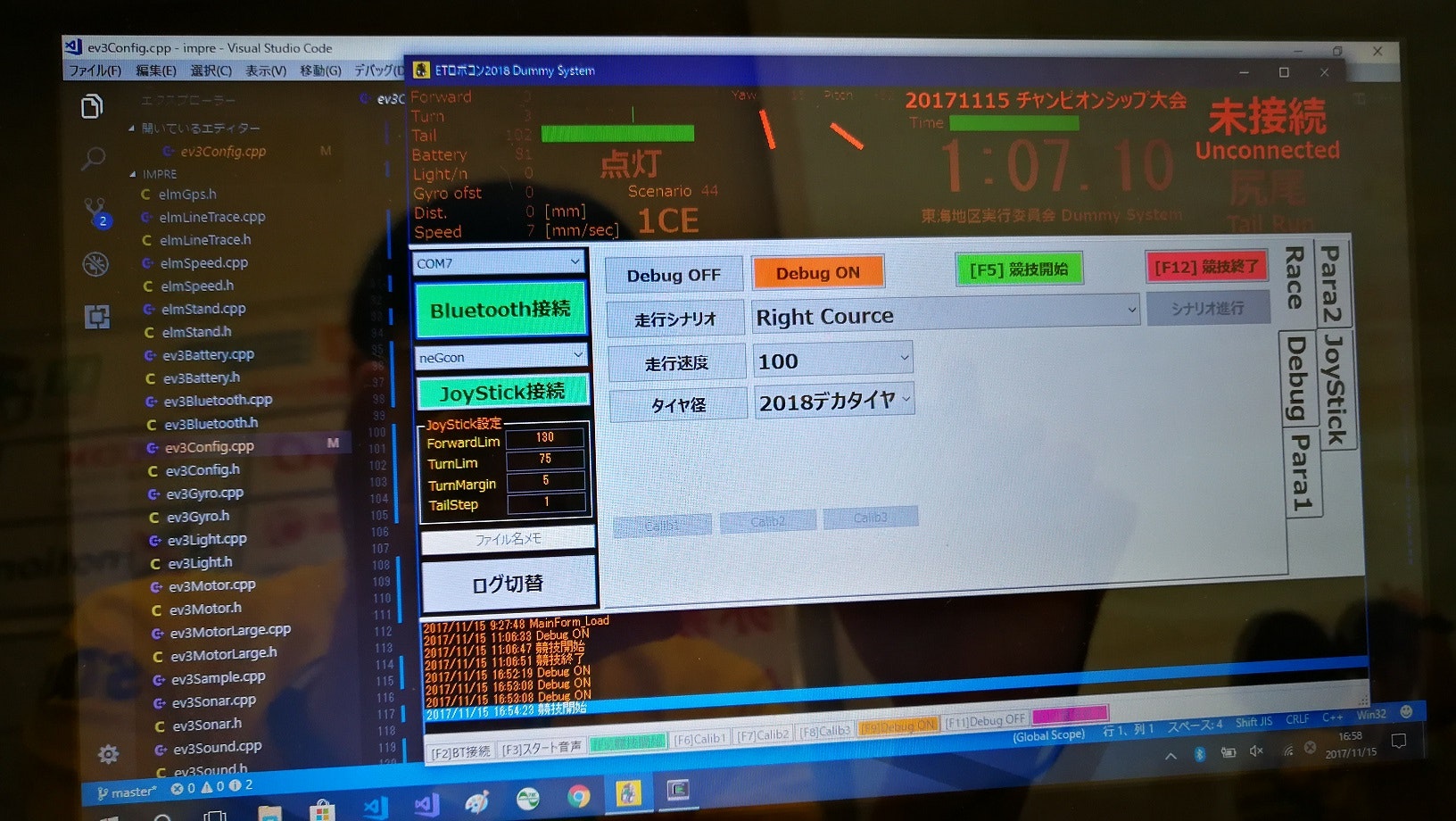
このツールはBluetoothで走行体と通信を行い、ログ取りだけでなく様々なコマンド制御を行うことができます。
コマンドボタンは多数ありますが、NXT時代の残骸のようなモノもあるので、現在でも役立ちそうな所を紹介します。
コマンド(一部)
競技を破綻させる可能性のあるコマンドは、 デバッグモードをONにしてからでないと使えない ようになっています。
通常は、デバッグON/OFFと競技開始(リモートスタート)しかできないようになっています。
操作ミスや誤作動で競技が止まってしまったなどという事故が起きないようにしましょう。
| コマンド | パラメーター |
|---|---|
| デバッグモード | ON/OFF |
| 競技開始 (リモートスタート) | - |
| 競技終了 | - |
| ラジコン | forward,turn,tail |
| 倒立 | - |
| 完全停止(尻尾で立つ) | - |
| ライントレース開始 | 左エッジ/右エッジ |
| ライントレース終了 | - |
| 各種パラメーター変更 | パラメーター |
ラジコン系コマンド
ラジコンができるようになると、作業効率がグンとアップします。いきなり難所攻略できちゃいます。(※操縦者のウデによります) 走行ログも取れます。
イベントに出したときに、初めて操作したお子様でも階段(当時14mm高さ×2段)を攻略できていました。
(動画) ETロボコン 2010年仕様 立体難所にBluetoothリモコンで挑む
走行体を自在に動かすには、forwardとturnをアナログコントロールできるコントローラーが必要になります。
オススメはネジコンです。まだ中古品が入手できるようですが、もしかしたら皆さんのお宅にもあるかもしれません。ご家族に聞いてみましょう。
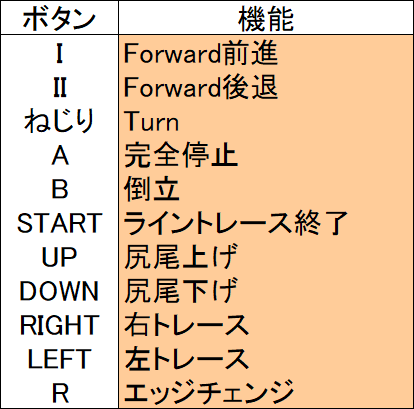
コントローラーをねじってturnをアナログ操作、赤いボタンの押し込みでforwardをアナログ操作できます。
運良く入手できた場合は、別途USB変換機も購入してください。
ライントレースコマンドは、コマンド設定後にラインに到達するとライントレースを開始します。forwardだけコントローラーで操作してturnはライントレースを自動で行うようになります。コースがあれば、自律走行を製作していなくても走行ログが取れてしまいます。
各種パラメーター変更コマンド
リモートでパラメーターを変更する機能はMindstorms NXT走行体を使用するようになった初年度2009年から既に作成したチームがあったので、マネして導入しました。サンプルコースをぐるぐる回りながらライントレースのパラメーター調整ができちゃいます。
ビルド~走行体への書き込み作業を何度もする必要はありません。
2018年走行体の開発では倒立振子APIのパラメーター調整で大活躍しました。
ログビューワー
ログの確認は.csvファイルをドロップするだけでグラフを描画してくれるツールを作成しています。
ログビューワーとロギングツールを共通で作成しているチームが多いですが、別件のツールを流用した都合でビューワー単体で作成しています。
2017チャンピオンシップ大会での2018走行体デモ走行のログ
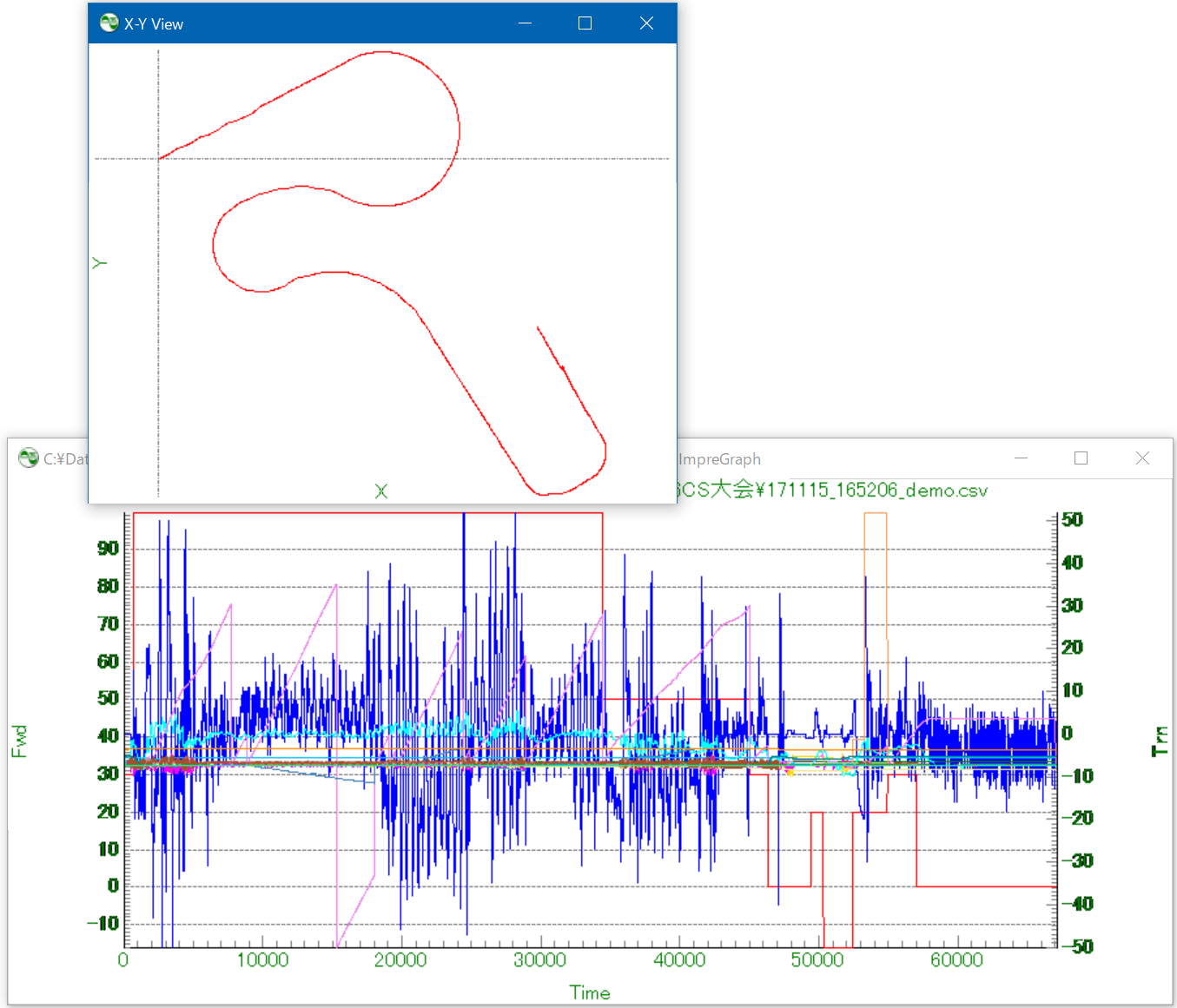
時間ごとの各データとX-Y Viewで走行軌跡を確認することができます。
使用している情報は区切りごとの相対距離・相対角度だけですので、コースが全体的に傾いているとか歪んでいるとかは気にしません。
活用法は例えば、デモ走行ではルックアップゲート通過後にゲートを倒してしまいましたが、表示項目をY1:forward、Y2:tail、Y3:距離にしてルックアップゲートの辺りを拡大すると、

尻尾を傾けてゲートを通過した後、起き上がり支援のために少し後退処理を入れていますが、なかなか起き上がれずに後ろに進みすぎていることが分かります。
このビューワーは今回、実行ファイルだけでも公開しようかと思っていたのですが、二画面とか表示倍率を変更している環境だと問題があることが分かりましたので、また機会があれば修正して公開したいと思います。
まとめ
今回はデバッグ支援ツールについて紹介しました。
ブロック並べ攻略の話。Team ASaGiの場合。後編。でも書かれていますが、シーズン中は開発作業、自分の場合は実行委員活動などで忙しくなるため、ツール類はオフシーズンに作っていました。
ETロボコン2018の走行体はタイヤ大径化で様々な特性が変わります。今から準備を進めておくことが、2018年大会での大きなアドバンテージに繋がるでしょう。