動機
カメラの接続・認識や複数台のカメラの取扱いができたので、次はARマーカーを使って、その位置・姿勢の情報を取得したい。逆行列をつかえば、マーカーに対しての、カメラの位置・姿勢を取得できるはず。
ROSには、ar_track_arlvarという、ARのパッケージと連携出きるのでそれを使う。
環境
- Ubuntu 16.04 LTS
- ROS Kinetic Kame
- 今回使用したのUSBカメラ(Logicool C270 UVC対応)1台
参考にした情報
ARパッケージのインストール
$ sudo apt-get install ros-kinetic-ar-track-alvar
基本は、これだけ。
ARマーカーの準備
上記、リンクに、マーカーのpdfなどがあるので、それらを印刷
launchファイルの作成・実行
launchファイルは、
RobotやSystemを完成させるまで Wiki*
の情報をそのまま使わせてもらう。
まだまだ、設定パラメータの意味が分かっていないなぁ。
<launch>
<node pkg="tf" type="static_transform_publisher" name="map_to_camera" output="screen" args="0 0 0 0.785398163 0 0 map camera 10" />
<node name="uvc_camera" pkg="uvc_camera" type="uvc_camera_node" output="screen" >
<param name="device" value="/dev/video0" />
<param name="width" value="640" />
<param name="height" value="480" />
<param name="fps" value="30"/>
<param name="frame_id" value="camera" />
<!-- <param name="camera_info_url" type="string" value="file://$(find PACKAGE_NAME)/cal.yml" />-->
<param name="camera_info_url" type="string" value="file:///home/{user_name}/.../camera.yaml"/>
</node>
<node name="image_view" pkg="image_view" type="image_view" output="screen" >
<remap from="image" to="image_raw" />
</node>
<!-- <arg name="marker_size" default="5.5" />-->
<arg name="marker_size" default="7.8" />
<arg name="max_new_marker_error" default="0.08" />
<arg name="max_track_error" default="0.2" />
<arg name="cam_image_topic" default="/image_raw" />
<arg name="cam_info_topic" default="/camera_info" />
<arg name="output_frame" default="/camera" />
<node name="ar_track_alvar" pkg="ar_track_alvar" type="individualMarkersNoKinect" respawn="false" output="screen"
args="$(arg marker_size) $(arg max_new_marker_error) $(arg max_track_error) $(arg cam_image_topic) $(arg cam_info_topic) $(arg output_frame)" />
重要なのは、下のほうか。
{user_name}/.../あたりは、それぞれの環境で。
コメントアウトしたように、パッケージ名を元に、相対パスを指定することもできる。
(汎用的になのは、相対パスだよなぁ。)
確認
上記launchファイルを動かしただけだと、カメラ画像がでるだけなので、
可視化をしてみる。
$ rosrun rviz rviz
を実行して、空の表示がでるだけなら、左下方の[Add]ボタンを押して、[by display type]タブの[TF]を選択して、[OK]。すると、カメラを原点にしたときの、マーカーの座標軸の様子が出る。
また、現在のカメラで映っている画像を確認するには、同様に[Add]ボタンから[Camera]を追加する。何も映らないようならば、左上部のCameraツリーの[Image Topic]に、/image_rawをプルダウンから選んで、決定をすればよい。
次には、ノードとトピックの関係を調べてみる。
$ rqt_graph
を実行すれば、
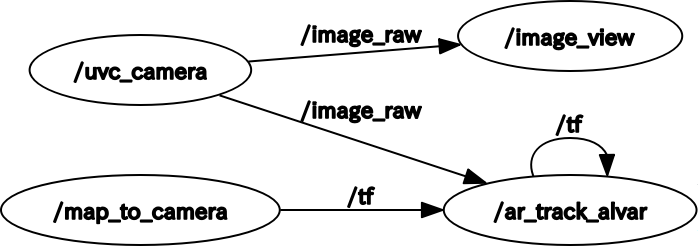
となって、カメラノードやビューワーノードがあり、ar_track_alvarノードが解析部?
つぎに、やりとりされているデータの確認。
$ rostopic list
とすれば、やりとりされているトピックなどが見える。
$ rostopic list
/ar_pose_marker
/ar_track_alvar/enable_detection
/ar_track_alvar/parameter_descriptions
/ar_track_alvar/parameter_updates
/camera_info
/image_raw
/image_raw/compressed
/image_raw/compressed/parameter_descriptions
/image_raw/compressed/parameter_updates
/image_raw/compressedDepth
/image_raw/compressedDepth/parameter_descriptions
/image_raw/compressedDepth/parameter_updates
/image_raw/theora
/image_raw/theora/parameter_descriptions
/image_raw/theora/parameter_updates
/image_view/output
/image_view/parameter_descriptions
/image_view/parameter_updates
/rosout
/rosout_agg
/tf
/tf_static
/visualization_marker
今後、必要なのは、/ar_pose_markerや/tfあたり。
rostopic info /tf
とすれば、
$ rostopic info /tf
Type: tf2_msgs/TFMessage
Publishers:
* /map_to_camera (http://deepstation:46842/)
* /ar_track_alvar (http://deepstation:44478/)
Subscribers:
* /ar_track_alvar (http://deepstation:44478/)
また、
$ rostopic info /ar_pose_marker
とすると、
Type: ar_track_alvar_msgs/AlvarMarkers
Publishers:
* /ar_track_alvar (http://deepstation:44478/)
Subscribers: None
と出るので、メッセージの型と、誰から誰に送られているかが分かる。
データを他でも横取りするには、この情報を元に、別のSubscriberを用意すれば良さそうだ。
ちなみに、やりとりされているメッセージの内部構造を調べておく。
まずは、/tfの内容。
$ rosmsg info tf2_msgs/TFMessage
とすれば、
geometry_msgs/TransformStamped[] transforms
std_msgs/Header header
uint32 seq
time stamp
string frame_id
string child_frame_id
geometry_msgs/Transform transform
geometry_msgs/Vector3 translation
float64 x
float64 y
float64 z
geometry_msgs/Quaternion rotation
float64 x
float64 y
float64 z
float64 w
transformsの配列があり、それぞれに、headerとchild_frame_id,transformが入っている様子。位置や姿勢を取り出すには、transformsの一つを取り出して(xxxとする)、
xxx.transform.translationで並進移動量ベクトルを、xxx.transform.rotationで座標軸の回転ベクトル(ここではクォータニオン)が取得できそう。
また、/ar_pose_markerのほうも見てみると、
$ rosmsg info ar_track_alvar_msgs/AlvarMarkers
とすれば、ar_pose_markerでやりとりされているメッセージの型が以下のように見える。
std_msgs/Header header
uint32 seq
time stamp
string frame_id
ar_track_alvar_msgs/AlvarMarker[] markers
std_msgs/Header header
uint32 seq
time stamp
string frame_id
uint32 id
uint32 confidence
geometry_msgs/PoseStamped pose
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
すると、一つのマーカーの位置・姿勢ベクトルは、
(やりとされているメッセージをmarkersという変数で受けたとすれば)、
ar_markers = markers.markers
for m in ar_markers:
ar_pose = pose.pose
pos = ar_pose.position
rot = ar_pose.orientation
のようにすれば、取得できそう。
まだ、個別の数値をチェックしていないのだけれども、メッセージの型を見る限り、/ar_pose_markerと/tfの両方に似たようなデータがあるけど、どっちをつかえばいいのだろう。カメラから見たマーカー座標系の位置・姿勢と、マーカーから見たカメラ座標の位置・姿勢ということなのかな?(RVizで可視化したときの振る舞いを考えると、/tfは前者かな?)