この記事は@ele_funとの共著です。
KeiganMotorとは?
結論から言えば、ハッカソンにおける最強アイテム。
株式会社Keiganが販売している多機能モーターモジュールです。今回使ったのはラピッドプロトタイピングに特化した製品である「KM-1U(ホイールキット)」です。
KeiganMotorは様々なイベントで貸し出しされており、自分が初めて知ったのもデジットハッカソン(大阪開催のハードウェア系ハッカソン)でした。

最強アイテム
作ったプロダクト
デジットハッカソンでは「自分で維持費を稼ぐ」をコンセプトにした"未来ゴミ箱"を作りました。
街中でゴミを捨てたいときに、ゴミ箱が見つからずモヤモヤした経験があり「お金払ってでも捨てたい」と思ったのをきっかけに「電子決済でゴミを捨てられるゴミ箱」を考えました。
最終的に「ROHM OPEN HACK CHALLENGE(ROHC2019)」で最優秀賞を受賞し、「LINEエンジニアブログ」で取り上げられたり、「KeiganMotorの使用例」で製品ページに掲載されるなど、なんだかすごいことになりました。
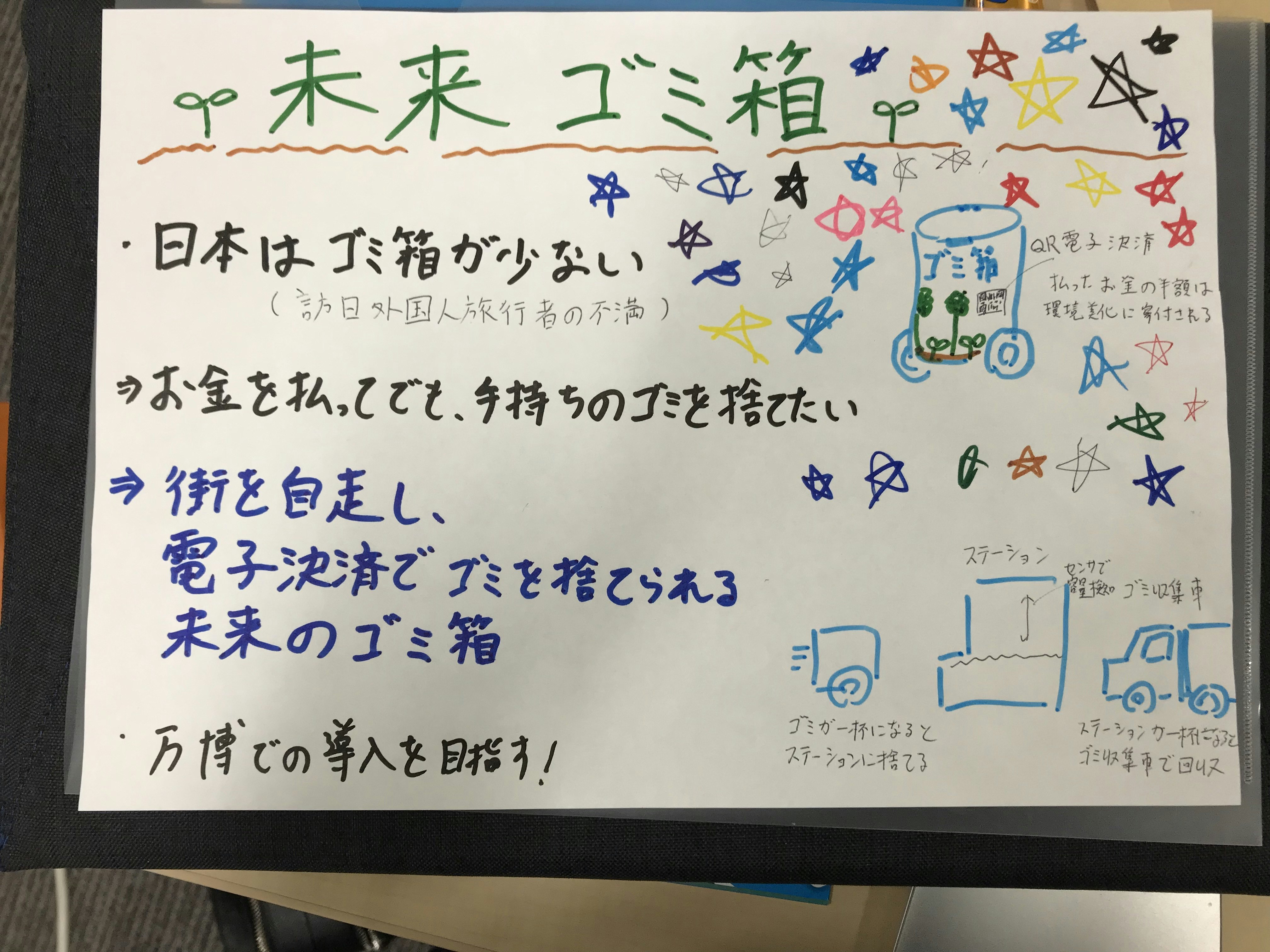
当初アイデア

最終的に出来上がったもの
なぜKeiganMotorはハッカソン最強なのか?
参加したことのある方はご存知だと思いますが、ハッカソンの大枠は以下の通りです。
- アイデア出し
- チームビルディング
- 開発
- プレゼン審査
チームで参加する場合は別ですが、大体の場合初対面のメンバーでチームを結成することが多いと思います。いざ開発を進めようとした時に、コンセプトの議論ばかりに時間を費やして、開発時間が無くなり、最終的に妥協を重ねたという苦い経験をした人も多いんじゃないでしょうか?
「未来ゴミ箱」の開発では「とりあえず試してから考えよう」という方針で、コンセプトの議論は全くせず、各プロダクト触り始めることをしました。
そのわずか1時間後…
おもむろ動き出すゴミ箱(クリックでyoutubeに飛びます。音量注意)
動くゴミ箱を見てチームメンバーのワクワク感が高まりました。「こんな操作はできるのか?」「こういう機能をつけてみてはどうか?」など、試したいことや妄想が膨らみ、チーム全体で目指すべきイメージが共有され、一度もピボットすることなく開発を続けられました。仕様書を見て議論するより、動くモノを見て議論した方が断然良いです。
その結果、ROHC2019の受賞に繋がったと思っています。
実際に触って分かった、KeiganMotor
モーター側の知識も装置も不要で、モバイルバッテリーにケーブルを繋げばすぐ動くというのが、一番の強みだと感じました。それも含めて実際の使用感(Good/Bad)を列挙したいと思います。
良い点
- 起動してすぐ動かせた
- 給電はモバイルバッテリーでOK
- スマホから操作・ブロックプログラミングが可能
- 反応速度が速いため、滑らかに動作する
- トルクがある程度出るため、機体が重くても大丈夫
- Arduinoから制御可能
- ファームウェアのバグはすぐ対応してくれる
- ライブラリが充実しているので、どの開発環境を選んでも安心
- 外部にモーター用の回路が不要(はんだ付けが不要)
- USB type-C 1本で給電できる
- ローレベルAPIで細かな制御ができる(ライブラリがない部分もある程度補える)
- モーターの状態がステータスLEDで確認できる(デバッグが楽)
注意点
- 個人で使うには価格感が少々高い
- I2Cケーブル作成が大変(ハッカソン当時)→ KeiganMotor用I2Cケーブル 発売されました
- 使えるライブラリに対してサンプルコードが少ない
- バッテリーによっては電流量不足で動作しない場合も
- 推奨は1ポート当たりの出力が2.4A以上
- USB PD対応のバッテリーだと安心
- GitHub資料が英語で、読むのが大変
- 有線で制御中、スマホからペアリングすると制御を乗っ取ることができる
- モーターの制御中に割り込みなどの処理を挟むと挙動がおかしくなる
- モーターの再起動が必要
まとめ
アイデアをすぐ形にできるという点は、プロダクトの完成イメージをチーム全体に共有できるということ。もし、何らかモノを動かすプロダクトを思いついたら、まずKeiganMotorで動くモノを作ることをお勧めします。