概要
ROS2 のGazebo環境においてvelodyne_simulatorの使い方のメモ
インストール
githubにあるvelodyne_simulatorではなくbitbucketにあるこちらのfoxy-develブランチを使う
mkdir -p ~/veloydne_ws/src
cd ~/veloydne_ws/src
git clone https://bitbucket.org/DataspeedInc/velodyne_simulator.git -b foxy-devel
cd ~/veloydne_ws
colcon build --symlink-install
サンプルの実行
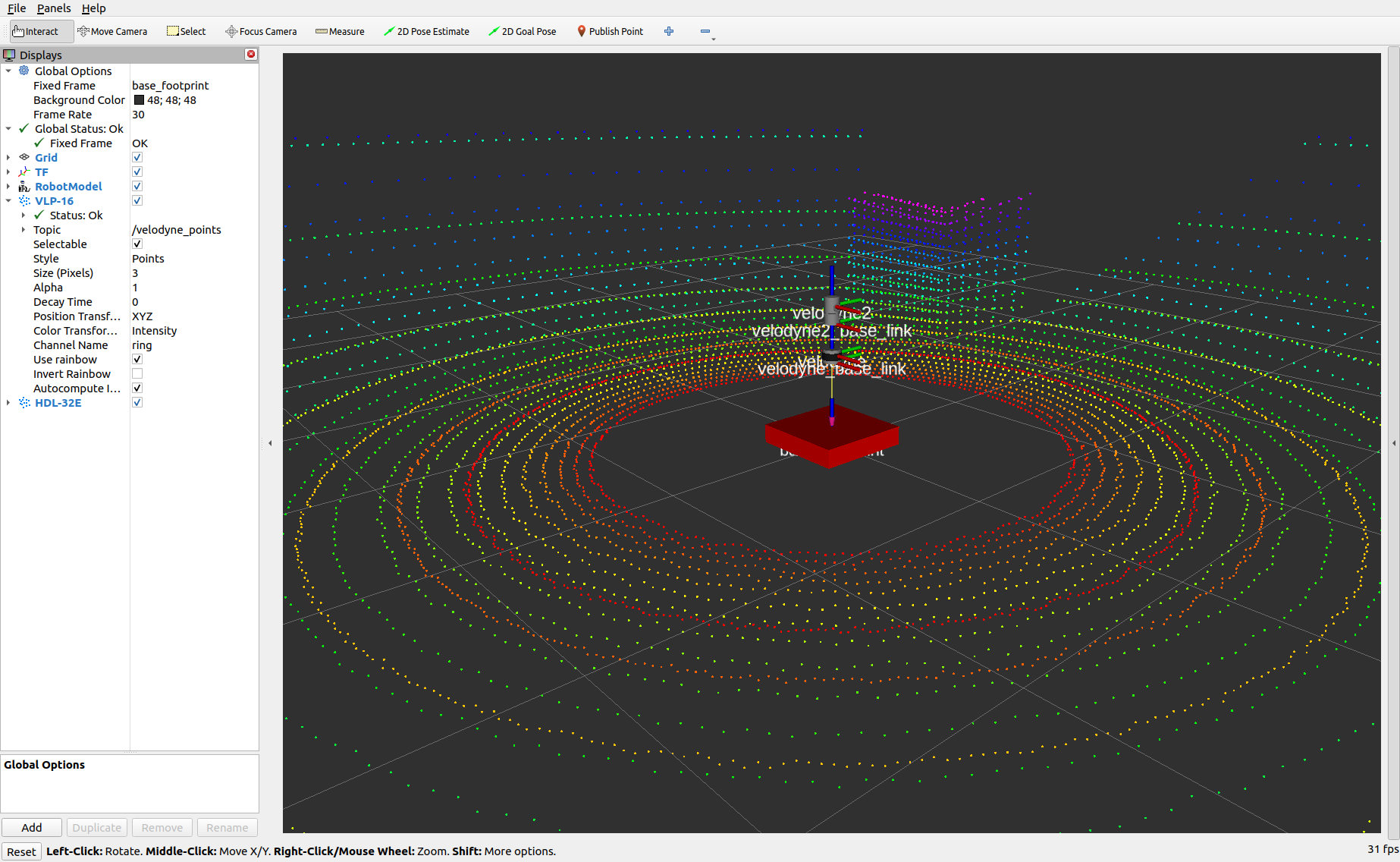
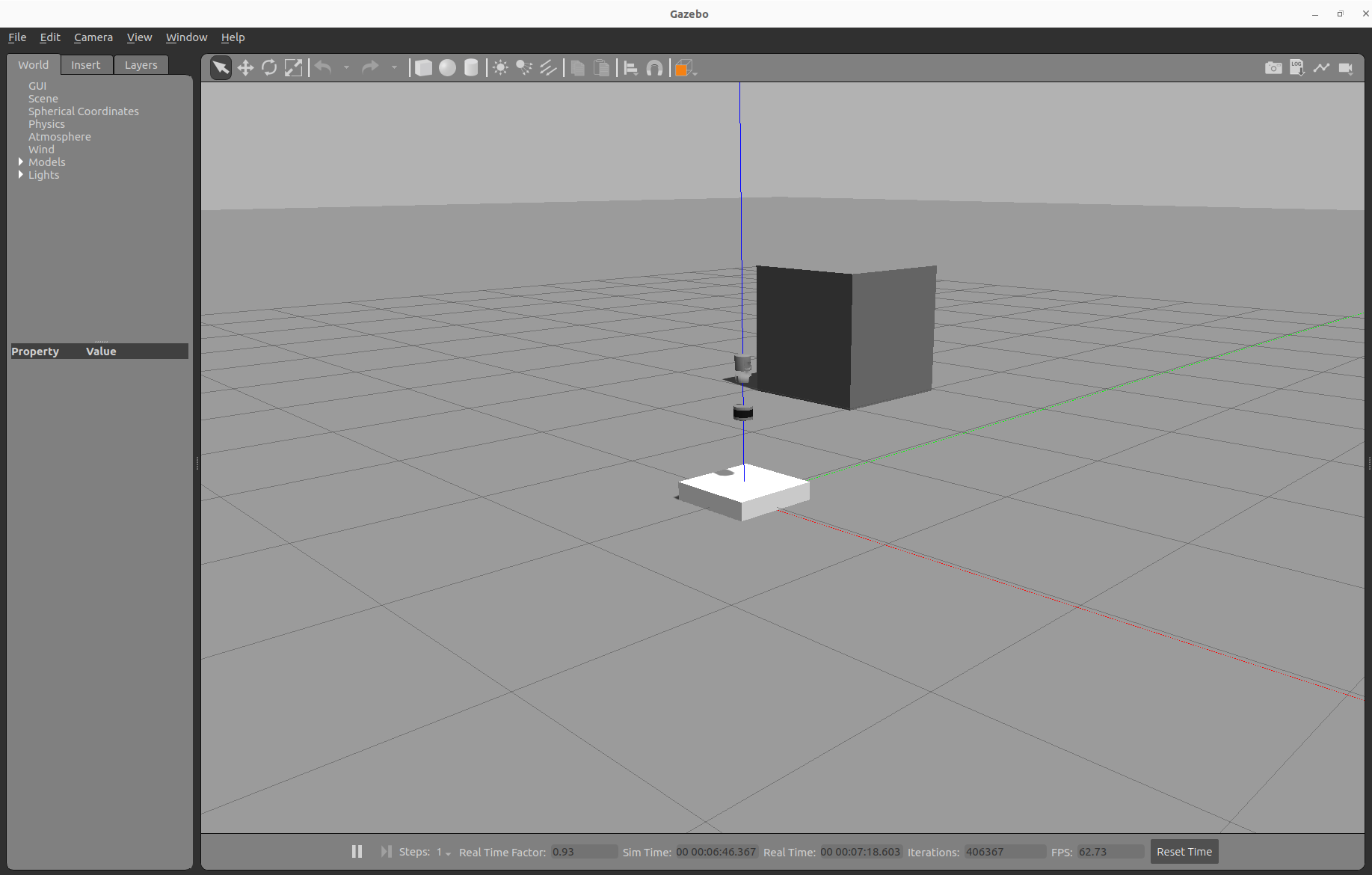
ros2 launch velodyne_description example.launch.py
Gazeboとrviz2が起動し、VLP-16とHDL-32E両方のPointCloud2が表示される
ロボットにのせる場合
urdfファイルに以下を追加 VLP-16の場合
<xacro:include filename="$(find velodyne_description)/urdf/VLP-16.urdf.xacro"/>
<xacro:VLP-16 parent="base_link" name="velodyne" topic="/velodyne_points" organize_cloud="${organize_cloud}" hz="10" samples="440" gpu="${gpu}">
<origin xyz="0 0 0.4" rpy="0 0 0" />
</xacro:VLP-16>