はじめに
DockerでROS環境を作るときにDockerfileの書き方などで詰まることがあったので、ここにDockerfile, docker-compose.ymlの書き方などをメモしておく
Dockerfileの作成
例としてubuntu20.04 ROS NoeticイメージにTurtlebot3のパッケージをインストールしたDocker イメージを作成し、
docker-composeでGazeboが起動するようなDockerfileを作成する。
以下Dockerfileのサンプル
FROM osrf/ros:noetic-desktop-full
# キーボード設定の選択を聞かれないようにする
ARG DEBIAN_FRONTEND=noninteractive
# Install apt packages
RUN apt-get update && apt-get install -y \
git \
vim \
wget \
tmux \
terminator && \
apt-get clean && rm -rf /var/lib/apt/lists/*
# Install ROS packages
RUN apt-get update && apt-get install -y \
ros-noetic-joy ros-noetic-teleop-twist-joy \
ros-noetic-teleop-twist-keyboard ros-noetic-laser-proc \
ros-noetic-rgbd-launch ros-noetic-rosserial-arduino \
ros-noetic-rosserial-python ros-noetic-rosserial-client \
ros-noetic-rosserial-msgs ros-noetic-amcl ros-noetic-map-server \
ros-noetic-move-base ros-noetic-urdf ros-noetic-xacro \
ros-noetic-compressed-image-transport ros-noetic-rqt* ros-noetic-rviz \
ros-noetic-gmapping ros-noetic-navigation ros-noetic-interactive-markers \
ros-noetic-dynamixel-sdk \
ros-noetic-turtlebot3-msgs \
ros-noetic-turtlebot3 && \
apt-get clean && rm -rf /var/lib/apt/lists/*
# Create ROS workspace
RUN echo "source /opt/ros/noetic/setup.bash" >> /root/.bashrc
RUN mkdir -p /root/catkin_ws/src
RUN cd /root/catkin_ws && /bin/bash -c "source /opt/ros/noetic/setup.sh; catkin_make"
RUN echo "source /root/catkin_ws/devel/setup.bash" >> /root/.bashrc
RUN cd /root/catkin_ws/src && git clone -b noetic-devel https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
RUN cd /root/catkin_ws && /bin/bash -c "source /opt/ros/noetic/setup.bash; catkin_make"
以下Dockerfileの説明
FROM osrf/ros:noetic-desktop-full
ベースイメージはros:noetic-desktop-fullを使う、ubuntu20.04のイメージにROSをインストールする方法もあるが時間がかかるので特に理由がなければROS インストール済みのイメージを使う
RUN apt-get update && apt-get install -y \
git \
...
apt-get clean && rm -rf /var/lib/apt/lists/*
gitやエディタなどよく使うものをインストールする。Dockerfile内でgit cloneをするのでgitは必ずここで入れておく
RUN apt-get update && apt-get install -y \
ros-noetic-joy ros-noetic-teleop-twist-joy \
...
必要なROSパッケージをaptでインストールする
RUN echo "source /opt/ros/noetic/setup.bash" >> /root/.bashrc
RUN mkdir -p /root/catkin_ws/src
RUN cd /root/catkin_ws && /bin/bash -c "source /opt/ros/noetic/setup.sh; catkin_make"
RUN echo "source /root/catkin_ws/devel/setup.bash" >> /root/.bashrc
ROSワークスペースの作成、DockerfileのRUNは/bin/shで実行されるためsourceコマンドは/bin/bashで実行されるように書く
RUN cd /root/catkin_ws/src && git clone -b noetic-devel https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
RUN cd /root/catkin_ws && /bin/bash -c "source /opt/ros/noetic/setup.bash; catkin_make"
aptでインストールできないROSパッケージはcatkin_ws/src以下にcloneしてcatkin_makeする。
もしGithubやBitbucketのprivateリポジトリをcloneしたい場合、一度ホストPCにgit clone してCOPYコマンドでDockerの中にコピーするのがよい
COPY turtlebot3_simulations/ /root/catkin_ws/src/turtlebot3_simulations/
docker buildしてDockerイメージの作成
docker build -t turtlebot_ros:latest .
docker-compose.ymlの作成
以下のようにdocker run を使ってDockerコンテナを作成、起動することもできるが、GUIを使う場合などコマンドが長くなってしまうのでdocker-compose.ymlを作ってdocker-compose upで起動するようにする。
docker run -it \
--env="DISPLAY=$DISPLAY" \
--env="QT_X11_NO_MITSHM=1" \
--volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" \
--name=turtlebot_ros \
turtlebot_ros:latest \
bash
以下Turtlebot3 Gazeboを起動するdocker-compose.ymlの例
GUIを表示するための環境変数などを追加、commandオプションで起動したあとに実行するコマンドを書く
version: "3"
services:
ros:
image: turtlebot_ros:latest
container_name: turtlebot_gazebo
environment:
- DISPLAY
- QT_X11_NO_MITSHM=1
- TURTLEBOT3_MODEL=burger
volumes:
- /tmp/.X11-unix:/tmp/.X11-unix
tty: true
command: bash -c "source /root/catkin_ws/devel/setup.bash; roslaunch turtlebot3_gazebo turtlebot3_world.launch"
network_mode: "host"
docker-compose.ymlの説明
ベースイメージの名前とコンテナ名を指定。
image: turtlebot_ros:latest
container_name: turtlebot_gazebo
環境変数の設定
ROS_MASTER_URI, ROS_IPなどを設定する場合はここに書く
environment:
- DISPLAY
- QT_X11_NO_MITSHM=1
- TURTLEBOT3_MODEL=burger
ホストPCとvolumesを共有する設定。
volumes:
- /tmp/.X11-unix:/tmp/.X11-unix
コンテナ起動時に実行するコマンド
ここにroslaunchなどを書くことでdocker-compose upしたらROSノードが立ち上がる
command: bash -c "source /root/catkin_ws/devel/setup.bash; roslaunch turtlebot3_gazebo turtlebot3_world.launch"
使用するnetworkの設定
host とすることでホストPCとネットワークが共有されるので、別のPCからホストPCのIPアドレスを指定してROSトピックの通信することができる。デフォルトではdocker networkが使用される。
network_mode: "host"
dockerコンテナの起動と終了
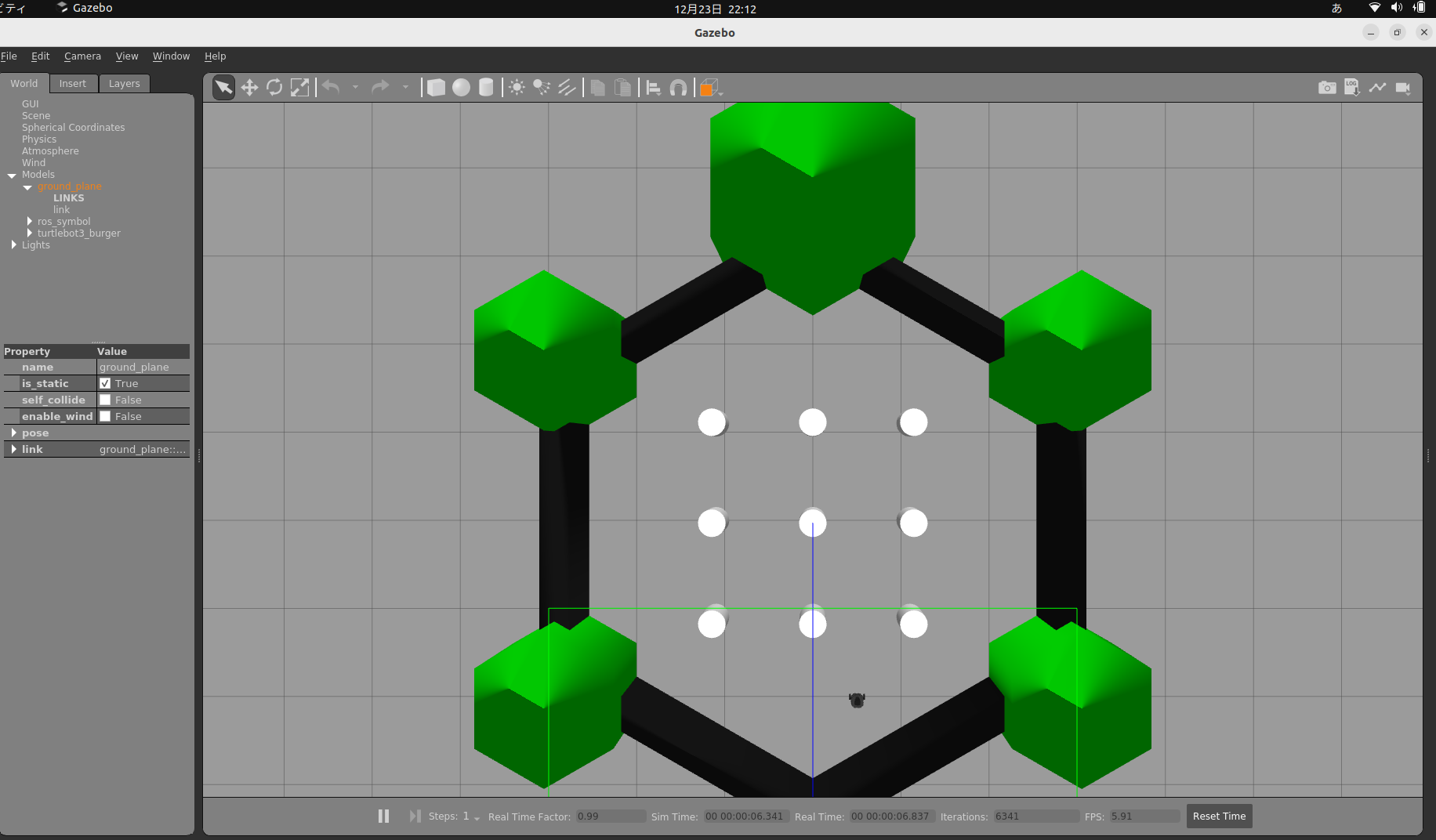
docker-compose upでGazeboのturtlebot3_worldが起動する
downするとdockerコンテナが消えるので注意
docker-compose up
docker-compose down
実行後にROSトピックを見たりファイル編集したい場合execコマンドでdocker コンテナに入る。
docker-composeでコンテナを作成するとdocker attachコマンドが使えないので注意。
docker exec -it turtlebot_gazebo bash
その他
docker-compose.ymlの中で複数コンテナを立ち上げてコンテナ間で通信する場合、roscoreだけ立ち上げるコンテナを作成すると安定して動く(経験上)。詳細は参考のroswiki チュートリアルを参照
ros-master:
image: ros:kinetic-ros-core
command: stdbuf -o L roscore
networks:
- ros
restart: always
シリアル通信のデバイスを使う場合deviceオプションを使う
以下の例では/dev/ttyUSB0をコンテナ内の/dev/ttyUSB0にマウントする
devices:
- /dev/ttyUSB0:/dev/ttyUSB0
参考
ros wikiのdocker composeのチュートリアル