はじめに
Nvidia DockerでGUIとGPUが使えるDocker イメージを作成してrockerでコンテナを起動するメモ
同様のDockerファイルはいろいろ公開されているが余計なものが多いのでDockerfileは自分で作成する
環境
ホストPCの環境
| Component | Version |
|---|---|
| OS | Ubuntu 22.04.2 LTS |
| GPU | NVIDIA GeForce RTX 3050Ti |
| NVIDIAドライバ | 530.30.02 |
| Docker | 23.0.5 |
Docker ・ Nvidia-dockerのインストール
Docker
sudo apt-get update
sudo apt-get install apt-transport-https ca-certificates curl gnupg-agent software-properties-common
curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add -
sudo add-apt-repository "deb [arch=amd64] https://download.docker.com/linux/ubuntu bionic stable"
sudo apt-get update
sudo apt-get install docker-ce
nvidia-docker2
curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add -
distribution=$(. /etc/os-release;echo $ID$VERSION_ID)
curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.list
sudo apt-get update
sudo apt-get install nvidia-docker2
sudo systemctl restart docker.service
Dockerfileの作成
適当な場所にDockerfileを作る
説明はコメントを参照
# ベースイメージの設定
FROM nvidia/opengl:base-ubuntu22.04
# 環境変数の設定
ENV DEBIAN_FRONTEND=noninteractive
ENV __NV_PRIME_RENDER_OFFLOAD=1
ENV __GLX_VENDOR_LIBRARY_NAME=nvidia
# 必要なパッケージのインストール
RUN apt-get update && apt-get install -y \
curl \
gnupg \
lsb-release
# ROSのリポジトリをsource listに追加
ENV UBUNTU_CODENAME=focal
RUN curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | apt-key add - \
&& echo "deb http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list
# ROS2のインストール
RUN apt-get update && apt-get install -y \
ros-humble-desktop
# colconのインストール
RUN apt-get install -y python3-colcon-common-extensions
# Gazeboのインストール
RUN apt-get install -y gazebo \
ros-humble-gazebo-*
# rqtのプラグインをインストール
RUN apt-get install -y ros-humble-rqt-*
# ワークスペースの作成
RUN mkdir -p ~/ros2_ws/src
WORKDIR /root/ros2_ws/
RUN /bin/bash -c '. /opt/ros/humble/setup.bash; colcon build'
# エントリーポイントを設定
COPY ./ros_entrypoint.sh /
RUN chmod +x /ros_entrypoint.sh
ENTRYPOINT ["/ros_entrypoint.sh"]
# コマンドを設定
CMD ["bash"]
Dockerコンテナで起動したrviz2やGazeboがGPUを使って描画できるようにOpenGLが入ったubuntu22.04のイメージをベースにする。
FROM nvidia/opengl:base-ubuntu22.04
Dockerfileと同じディレクトリにros_entrypoint.shを作成する。
毎回コンテナ起動する度にsource ../setup.bashを実行するのは面倒なのでここに記述してCOPY ./ros_entrypoint.sh / でコンテナ内にコピーする
vim ros_entrypoint.sh
sudo chmod +x ros_entrypoint.sh
#!/bin/bash
source /opt/ros/humble/setup.bash
source ~/ros2_ws/install/setup.bash
exec "$@"
Dockerfileのビルド
Dockerfileがあるディレクトリで以下を実行
ros2_humbleには適当な名前を設定
docker build -t ros2_humble .
imageができているか確認
docker images
REPOSITORY TAG IMAGE ID CREATED SIZE
ros2_humble latest c124ead937a3 9 hours ago 4.23GB
rocker でDockerコンテナの起動
rockerのインストール
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt update
sudo apt-get install python3-rocker
コンテナの起動
以下先程作成したros_humbleイメージのコンテナを起動するコマンドの例
rocker --nvidia --x11 --user --network host --privileged --nocleanup --name humble ros2_humble:latest
--nvidia : GPUを有効にする
--x11 : X11を有効にしてGUIを使えるようにする
--network host : ホストPCとネットワークを共有して他PCとROS2通信したり、Ethernetのデバイスを使ったりする
--privileged : USBデバイスなどを使えるように
--nocleanup : コンテナstop時にコンテナが削除されないようにする
--name humble : コンテナに名前をつける
2回目以降起動するとき
docker start humble
docker attach humble
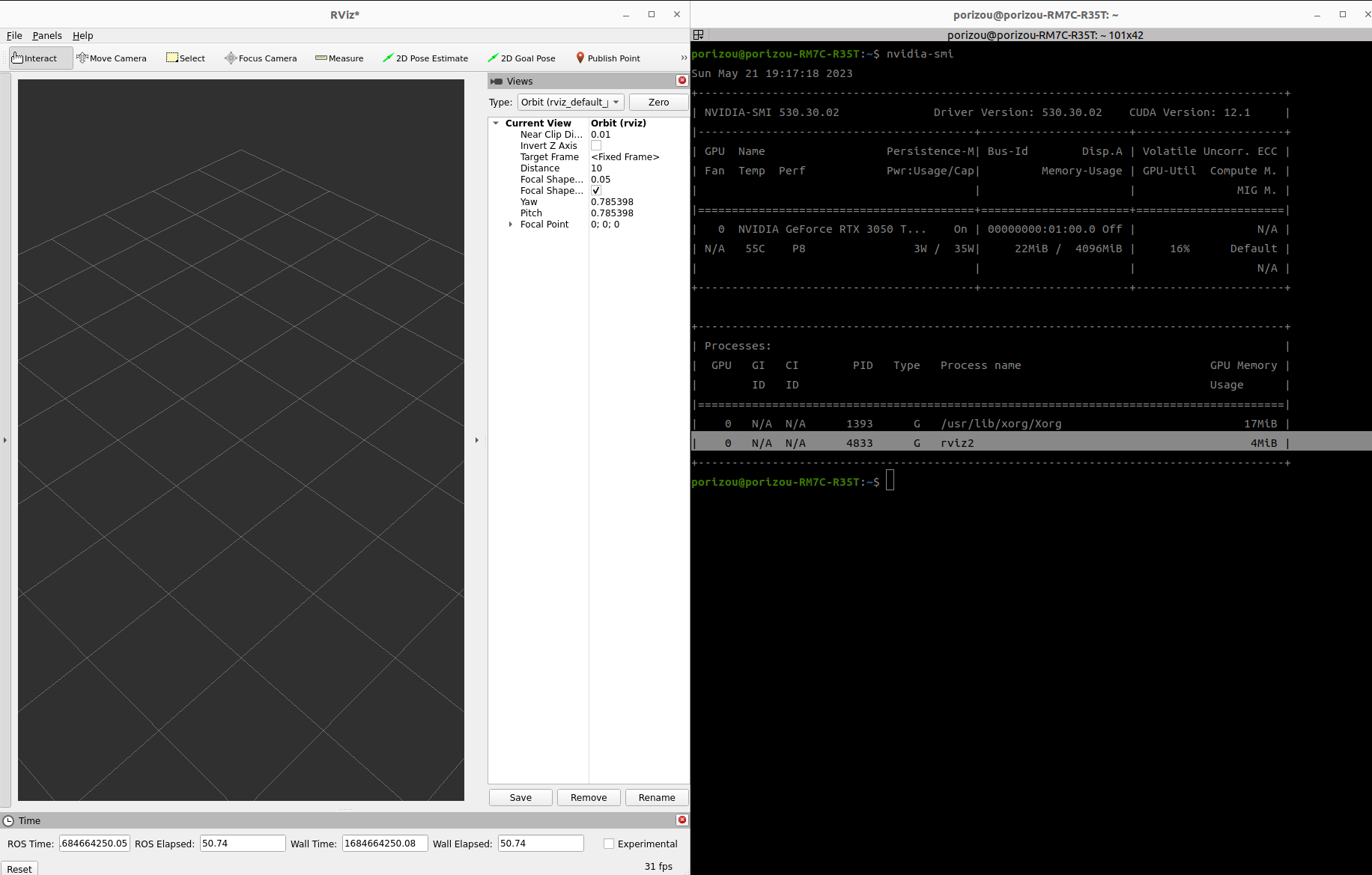
rviz2, Gazeboの動作確認
docker コンテナ内でrviz2 やGazeboを起動
ホストPCまたはDockerコンテナ内のターミナルでnvidia-smi を実行してrviz2またはGazeboのプロセス名前があればOK
rviz2
nvidia-smi
rockerのオプション
| オプション | 日本語の説明 |
|---|---|
| -h, --help | このヘルプメッセージを表示して終了します |
| --noexecute | 廃止予定(デフォルト:False) |
| --nocache | キャッシュを無効にします |
| --nocleanup | コンテナが停止したときにDockerコンテナを削除しない(デフォルト:False) |
| --pull | Dockerイメージをプルします |
| -v, --version | プログラムのバージョン番号を表示して終了します |
| --dev-helpers | 開発ツールのemacsとbyobuを環境に追加します(デフォルト:None) |
| --devices [DEVICES [DEVICES ...]] | デバイスをコンテナにマウントします(デフォルト:None) |
| --env NAME[=VALUE] [NAME[=VALUE] ...], -e NAME[=VALUE] [NAME[=VALUE] ...] | 環境変数を設定します(デフォルト:[]) |
| --env-file ENV_FILE | env-fileを介して環境変数を設定します(デフォルト:None) |
| --git | ホストからのグローバルGit設定を使用します(/etc/gitconfigおよび~/.gitconfig)(デフォルト:None) |
| --git-config-path GIT_CONFIG_PATH | git設定へのパスを上書きします(デフォルト:/home/daisuke/.gitconfig) |
| --home | ユーザーのホームディレクトリをマウントします(デフォルト:None) |
| --name NAME | コンテナの名前(デフォルト:) |
| --network {host,none,bridge} | 使用するネットワーク設定(デフォルト:None) |
| --nvidia | nvidiaを有効にします(デフォルト:None) |
| --privileged | コンテナに拡張権限を付与します(デフォルト:None) |
| --pulse | pulseオーディオデバイスをマウントします(デフォルト:None) |
| --ssh | SSHエージェントをコンテナに転送します(デフォルト:None) |
| --user | 現在のユーザーIDをマウントし、そのユーザーとして実行します(デフォルト:None) |
| --user-override-name USER_OVERRIDE_NAME | 現在のユーザー名を上書きします(デフォルト:None) |
| --user-preserve-home | 新しいユーザーを作成するときにホームディレクトリが存在する場合は削除しません |
| --volume HOST-DIR[:CONTAINER-DIR[:OPTIONS]] [HOST-DIR[:CONTAINER-DIR[:OPTIONS]] ...] | コンテナ内のボリュームをマウントします(デフォルト:None) |
| --x11 | x11を有効にします(デフォルト:None) |
| --mode {interactive,non-interactive,dry-run} | rockerの操作モードを選択します(デフォルト:interactive) |
| --image-name IMAGE_NAME | 最終イメージにタグをつけます。dry-runと一緒に有用です(デフォルト:None) |
| --extension-blacklist [EXTENSION_BLACKLIST [EXTENSION_BLACKLIST ...]] | これらの拡張機能のロードを防ぎます(デフォルト:[]) |
参考