概要
ROS 2 Humble環境でサンプルのrosbagデータを使ってLIO-SAMを動かしてみた
インストール
ROS2の依存パッケージのインストール
sudo apt install ros-humble-perception-pcl \
ros-humble-pcl-msgs \
ros-humble-vision-opencv \
ros-humble-xacro
gtsamのインストール
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt install libgtsam-dev libgtsam-unstable-dev
LIO-SAMのインストール
mkdir -p ~/slam_ws/src
cd ~/slam_ws/src
git clone https://github.com/TixiaoShan/LIO-SAM.git -b ros2
cd ..
colcon build --symlink-install --packages-select lio_sam
サンプルのrosbag のダウンロード
master ブランチのSample datasetsから適当なサンプルのrosbagデータをダウンロードする
サンプルのrosbagファイルをROS2用のrosbag に変換
以下の記事を参考にrosbagsをインストールして使用する
rosbags-convert walking_dataset.bag
実行
/src/LIO-SAM/config/param.yamlの入力トピックを以下のように書き換える(walking_datasetの場合)
param.yaml
# Topics
pointCloudTopic: "/points_raw" # Point cloud data
imuTopic: "/imu_correct" # IMU data
odomTopic: "odometry/imu" # IMU pre-preintegration odometry, same frequency as IMU
gpsTopic: "odometry/gpsz" # GPS odometry topic from navsat, see module_navsat.launch file
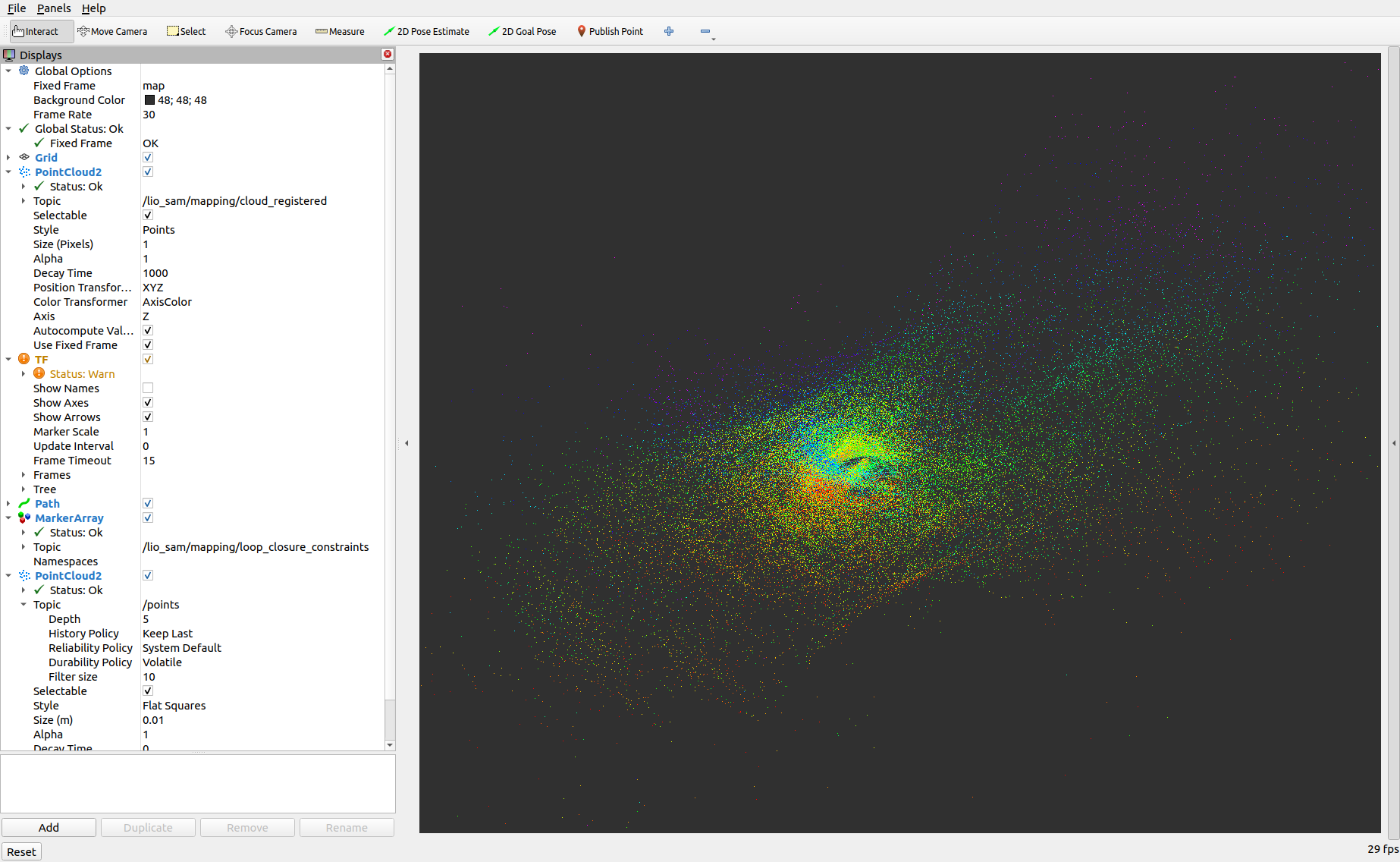
LIO-SAMの実行
ros2 launch lio_sam run.launch.py
ダウンロードして変換したrosbagの実行
ros2 bag play walking_dataset
なんかうまくいかない
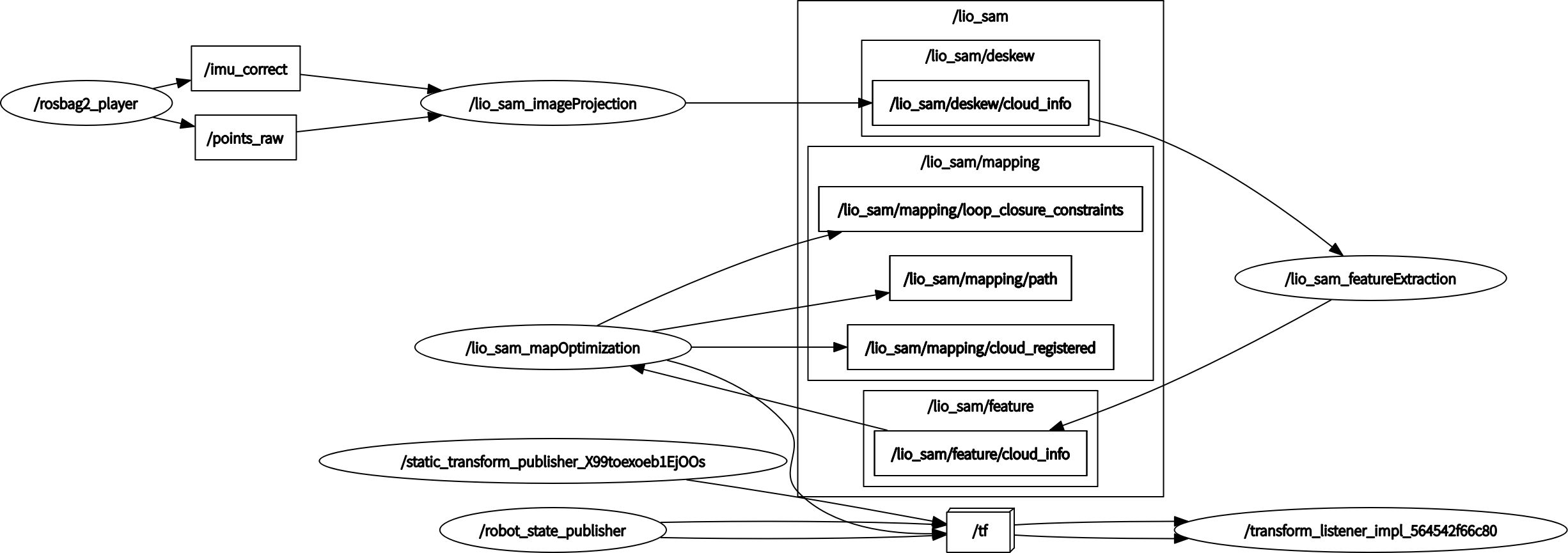
rqt_graph
参考