はじめに
ROS2 環境でLaserScanメッセージとPointCloud2を相互に変換するpointcloud_to_laserscanの使い方のメモ
環境
ROS2 Humble , Jazzy
インストール
sudo apt install ros-$ROS_DISTRO-pointcloud-to-laserscan
LaserScanをPointCloud2に変換する
laserscan_to_pointcloud_nodeを使用
例としてTurtleBot3 Simulation のLaserScan型の/scanトピックをPointCloud2に変換する。
適当にlaserscan_to_pointcloud_nodeを起動するだけのlaunchを作成
実機で試す場合はGazeboの代わりにそれぞれのLiDARドライバを起動してください。
remappingsで入出力トピック名を設定
remappings=[('scan_in', '/scan'),
('cloud', '/cloud')],
laserscan_to_pointcloud.launch.py
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.actions import ExecuteProcess
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='pointcloud_to_laserscan',
executable='laserscan_to_pointcloud_node',
name='laserscan_to_pointcloud',
remappings=[('scan_in', '/scan'),
('cloud', '/cloud')],
parameters=[{'target_frame': '',
'transform_tolerance': 0.01,
'use_sim_time': True}]
),
])
実行
TurtleBot3のGazeboシミュレーションを起動
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
laserscan_to_pointcloudを実行
ros2 launch laserscan_to_pointcloud.launch.py
出力のPointCloud2を購読するNodeがいないとLaserScanのSubscriberが動かない仕様なので注意
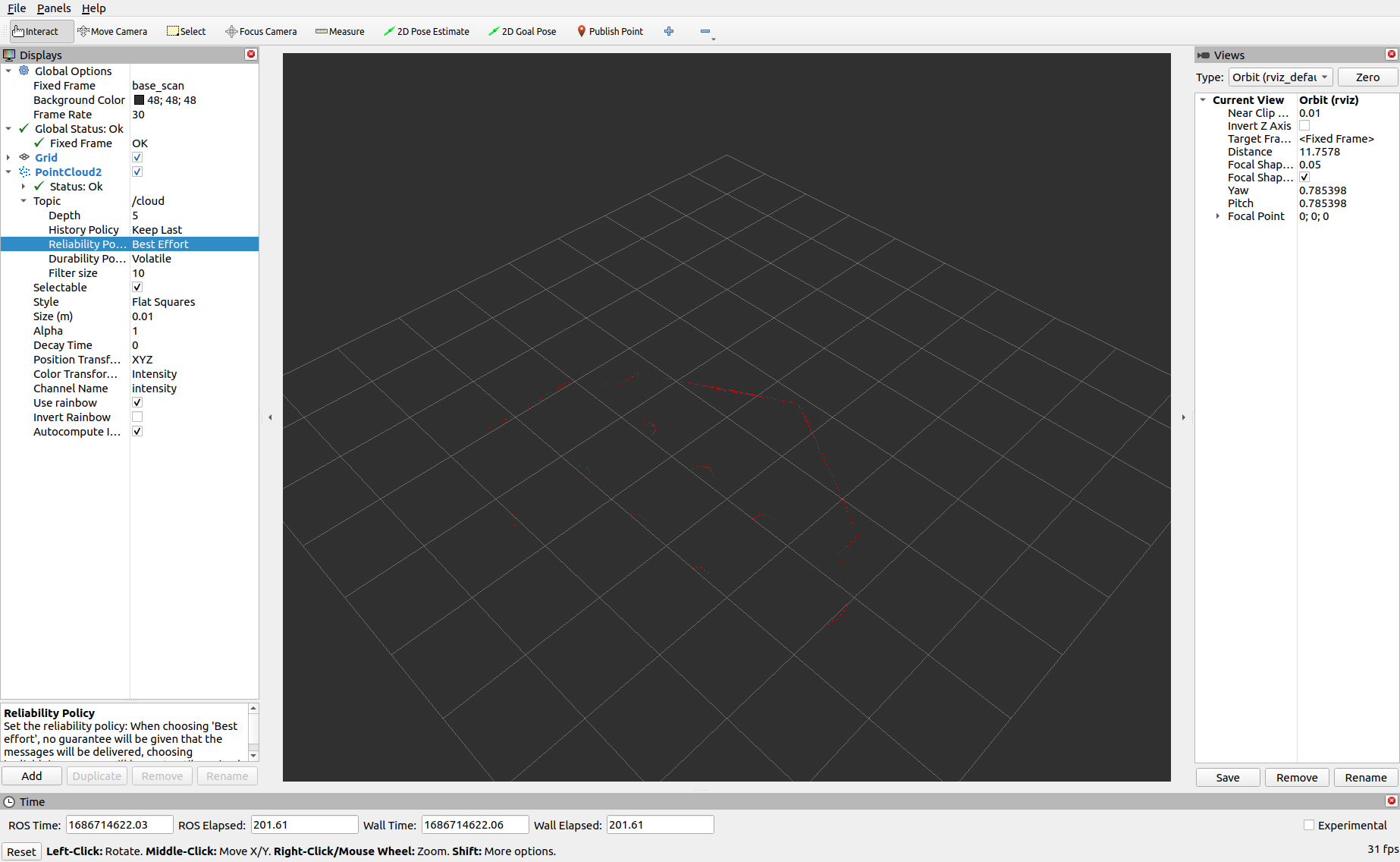
rviz2でPointCloudを見る
PublishするPointCloudのQoS設定がSensorDataQoSになっているので、TopicのReliability PolicyをBest Effortにするとrviz2に点群が表示される。

PointCloud2をLaserScanに変換する
pointcloud_to_laserscan nodeを使用
動作確認にはGazeboのvelodyne_simulatorを使う
/velodyne_pointsの上下0.2mのpointcloudをLaserScanに変換
remappingsで入出力トピック名を設定
remappings=[('cloud_in', '/velodyne_points'),
('scan', '/scan')],
pointcloud_to_laserscan.launch.py
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.actions import ExecuteProcess
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='pointcloud_to_laserscan', executable='pointcloud_to_laserscan_node',
remappings=[('cloud_in', '/velodyne_points'),
('scan', '/scan')],
parameters=[{
'target_frame': '',
'transform_tolerance': 0.01,
'min_height': -0.2,
'max_height': 0.2,
'angle_min': -3.1415, # -M_PI/2
'angle_max': 3.1415, # M_PI/2
'angle_increment': 0.0087, # M_PI/360.0
'scan_time': 0.3333,
'range_min': 0.45,
'range_max': 30.0,
'use_inf': True,
'inf_epsilon': 1.0
}],
name='pointcloud_to_laserscan'
)
])
velodyne_simulatorの実行
ros2 launch velodyne_description example.launch.py
ros2 launch pointcloud_to_laserscan.launch.py
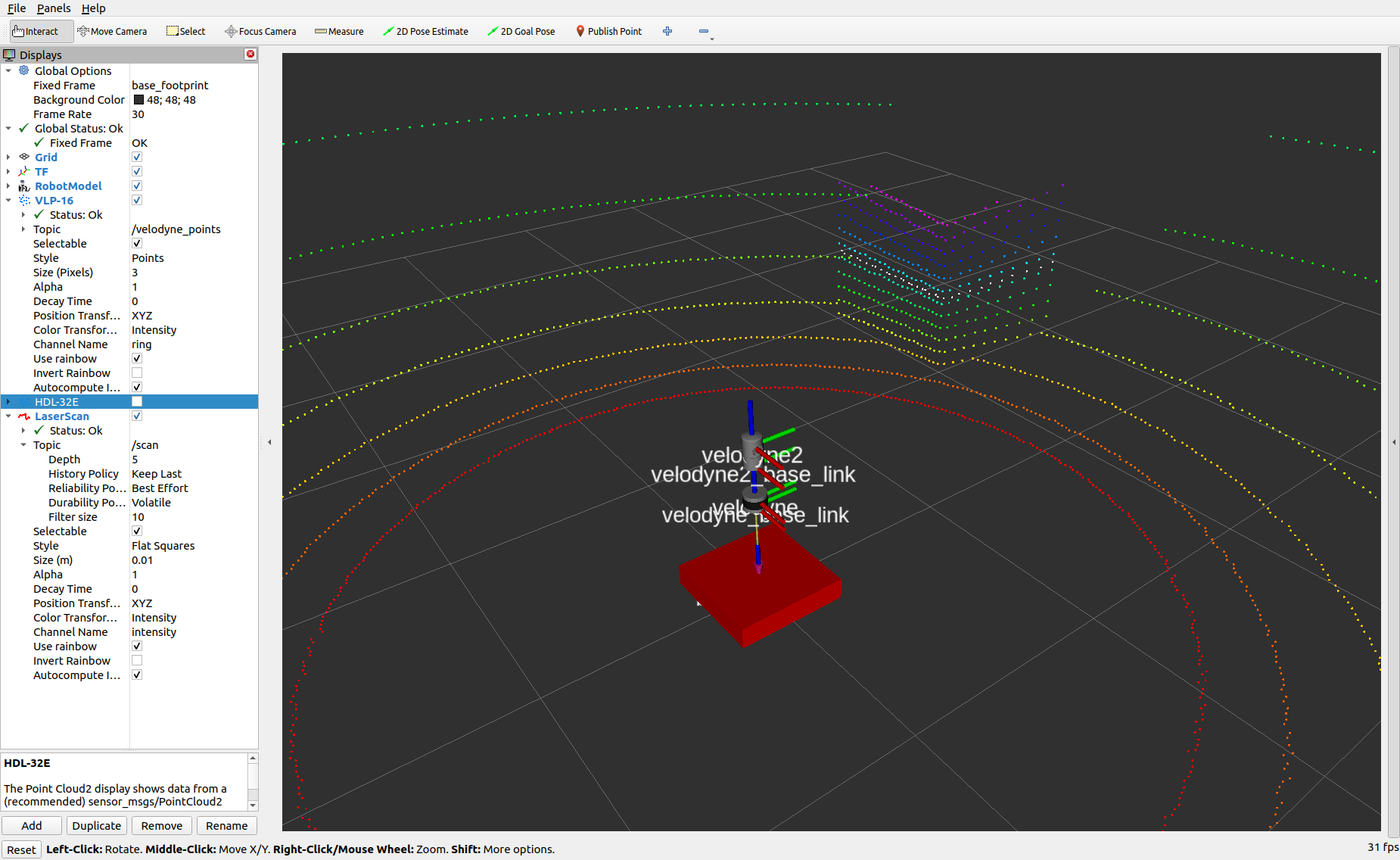
rviz2でLaserScanを見る
白い点が変換後の/scan
参考